
自校正調節器
正文
利用實時辨識技術(見系統辨識)自動校正系統特性的適應控制系統。自校正調節器具有對系統或控制器參數進行線上估計的能力,可通過實時地識別系統和環境的變化來相應地自動修改參數,使閉環控制系統達到期望的性能指標或控制目標,有一定的適應性。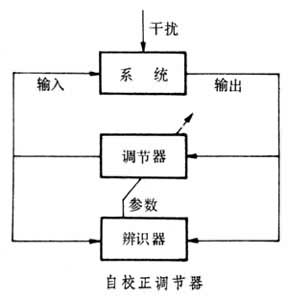 在經典控制理論和最優控制理論中,控制器的設計方法是建立在系統數學模型不變或事先已知的基礎上的。但很多實際系統的數學模型是無法確切了解的,並且隨著環境變化系統特性也在改變。因此,通常的非適應控制技術不能線上建立數學模型,也不能實時調整系統的參數。為了克服通常的控制技術的這些缺點,R.卡爾曼於1958年提出自校正調節器的構想。但由於當時適應控制理論尚未充分發展,又缺乏適用的計算機,卡爾曼的構想未能得到進一步的發展,更未能付諸實施。1970年,V.彼特卡把自校正調節器的理論研究推廣到隨機情況。其後,隨著隨機控制理論、系統辨識理論和計算機技術的發展,自校正調節器的研究和套用迅速發展起來。1973年K.J.阿斯特勒姆和B.維滕馬克提出一種簡易可行的自校正調節器實現方案,引起廣泛重視。在這個方案中,用一個表示輸入輸出關係的線性差分方程(可以包含干擾項)作為系統的預測數學模型(稱為可控自回歸滑動平均模型,縮寫為CARMA),用遞推最小二乘法線上估計模型的參數,直接得到一個輸出方差最小的自校正調節器(見圖)。這種方案中系統的組成結構簡單,容易實現,並易於在工業過程控制中推廣。它的缺點是對於非最小相位系統控制過程可能發散。1975年,D.W.克拉克和P.J.高思羅普又提出廣義輸出最小方差的自校正調節器方案,不但能限制控制輸入的幅度,還能限制輸出與設定值之間的誤差,能同時用於最小相位系統和非最小相位系統。1979年P.E.韋爾斯泰德等人提出具有零極點配置功能的自校正調節器,能夠線上整定系統或控制器的參數,使閉環系統的零點和極點配置到指定部位上去。隨後,針對各種不同性質的系統(多變數系統、非線性系統、分布參數系統、時變系統和連續系統等)提出了相應的自校正調節器方案。此外,還出現了一些專用性的自校正調節器,如自校正LQG(線性二次高斯)調節器,自校正 PID(比例積分微分)調節器等。
在經典控制理論和最優控制理論中,控制器的設計方法是建立在系統數學模型不變或事先已知的基礎上的。但很多實際系統的數學模型是無法確切了解的,並且隨著環境變化系統特性也在改變。因此,通常的非適應控制技術不能線上建立數學模型,也不能實時調整系統的參數。為了克服通常的控制技術的這些缺點,R.卡爾曼於1958年提出自校正調節器的構想。但由於當時適應控制理論尚未充分發展,又缺乏適用的計算機,卡爾曼的構想未能得到進一步的發展,更未能付諸實施。1970年,V.彼特卡把自校正調節器的理論研究推廣到隨機情況。其後,隨著隨機控制理論、系統辨識理論和計算機技術的發展,自校正調節器的研究和套用迅速發展起來。1973年K.J.阿斯特勒姆和B.維滕馬克提出一種簡易可行的自校正調節器實現方案,引起廣泛重視。在這個方案中,用一個表示輸入輸出關係的線性差分方程(可以包含干擾項)作為系統的預測數學模型(稱為可控自回歸滑動平均模型,縮寫為CARMA),用遞推最小二乘法線上估計模型的參數,直接得到一個輸出方差最小的自校正調節器(見圖)。這種方案中系統的組成結構簡單,容易實現,並易於在工業過程控制中推廣。它的缺點是對於非最小相位系統控制過程可能發散。1975年,D.W.克拉克和P.J.高思羅普又提出廣義輸出最小方差的自校正調節器方案,不但能限制控制輸入的幅度,還能限制輸出與設定值之間的誤差,能同時用於最小相位系統和非最小相位系統。1979年P.E.韋爾斯泰德等人提出具有零極點配置功能的自校正調節器,能夠線上整定系統或控制器的參數,使閉環系統的零點和極點配置到指定部位上去。隨後,針對各種不同性質的系統(多變數系統、非線性系統、分布參數系統、時變系統和連續系統等)提出了相應的自校正調節器方案。此外,還出現了一些專用性的自校正調節器,如自校正LQG(線性二次高斯)調節器,自校正 PID(比例積分微分)調節器等。 在工作原理上,自校正調節器是以分離原理為依據的,把參數的估計和控制律的計算分開進行。參數估計採用遞推方法,計算量較小,易於用計算機實現。自校正調節器已在不少工程技術領域(如造紙、化工、冶金、水泥、熱力、船舶和飛機的自動駕駛裝置、機械手等)中被採用,取得了較好效果。
參考書目
C.J.Harris and A.Billings,ed.,Self-Tuning and Adaptive Control: Theory and Applications,Peter Peregrinus Ltd.,Stevenage,UK,1981.
袁著祉著:《現代控制理論在工程中的套用》,科學出版社,北京,1985。
