
正文
自動控制系統分為確定性系統和不確定性系統兩類,前者可以通過觀測來確定系統的狀態,後者則不能。隨機系統是不確定性系統的一種,其不確定性是由隨機性引起的。嚴格地說,任何實際的系統都含有隨機因素,但在很多情況下可以忽略這些因素。當這些因素不能忽略時,按確定性控制理論設計的控制系統的行為就會偏離預定的設計要求,而產生隨機偏差量。飛機或飛彈在飛行中遇到的陣風,在空間環境中衛星姿態和軌道測量系統中的測量噪聲,各種電子裝置中的噪聲,生產過程中的種種隨機波動等,都是隨機干擾和隨機變數的典型例子。隨機控制系統的套用很廣,涉及航天、航空、航海、軍事上的火力控制系統,工業過程控制,經濟模型的控制,乃至生物醫學等。隨機控制理論研究的課題包括隨機系統的結構特性和運動特性(如動態特性、能控性、能觀測性、穩定性)的分析,隨機系統狀態的估計,以及隨機控制系統的綜合(即根據期望性能指標設計控制器)。隨機系統中含有隨機變數,所以在研究中需要使用隨機過程的基本概念和機率統計方法。嚴格實現隨機最優控制是很困難的。對於線性二次型高斯(LQG)隨機過程控制問題,包括它的特例最小方差控制問題,可以套用分離原理把隨機最優控制問題分解成狀態估計問題和確定性最優控制問題,最終能得到全局最優的結果。但對於一般的隨機控制問題套用分離原理只能得到次優的結果。
隨機狀態模型 隨機系統在連續時間情形下的動態過程,常可用隨機微分方程


y(t)=h【x(t),θ,t】+v(t)
式中v(t)為輸出通道中的隨機干擾,假定為白色噪聲。隨機最優控制 使隨機控制系統的某個性能指標泛函取極小值的控制稱為隨機最優控制。由於存在隨機因素,這種性能指標泛函需要表示為統計平均(求數學期望)的形式:
 或
或
隨機最優控制有兩個重要的性質。由於存在不確定性,控制作用常寧可取得弱一些,保守一些。這稱為謹慎控制。另一方面為更好和更快地進行估計,必須不斷激發系統中各種運動模式,為此需要加入一些試探作用。試探作用的大小,則根據增加的誤差、直接費用和所帶來的好處等因素加以折衷權衡進行選擇。謹慎和試探已成為設計隨機控制策略的兩個重要原則。
LQG問題
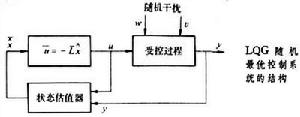 線性 (Linear)二次型 (quadratic)高斯(Gaussian)隨機過程控制問題是用途最廣的且可以用分離原理設計全局最優控制系統的一類問題。對於離散時間的情況,受控對象用如下線性差分方程來描述:
線性 (Linear)二次型 (quadratic)高斯(Gaussian)隨機過程控制問題是用途最廣的且可以用分離原理設計全局最優控制系統的一類問題。對於離散時間的情況,受控對象用如下線性差分方程來描述: 



參考書目
阿斯特勒姆著,潘裕煥譯:《隨機控制理論導論》,科學出版社,北京,1983。(K.J.Astr╂m, Introduction to Stochastic Control Theory,Academic Press, New York,1970.)
