適應控制系統
正文
能在系統和環境的信息不完備的情況下改變自身特性來保持良好工作品質的控制系統,又稱自適應控制系統。信息不完備表現為系統和環境的特性或其變化規律的不確定性。適應控制系統中採用有目的的搜尋和試探等方法,通過對環境不斷進行觀測和對已有控制品質進行評價和分析,在採集和加工信息的基礎上學習和改進關於環境特性的知識,減小不確定性,進而模仿工程師的設計過程,自動地調整系統的結構或參數,達到改善系統品質的目標。在大多數情況下,自適應過程必須依靠計算機來完成。適應性是生物機體的基本特性之一(見適應)。無論是生物個體還是整個物種,都是依靠適應性在長期進化過程中逐漸形成各種靈活、完善的控制功能的。生物的適應性可成為建立適應控制系統的原理和各種方法的借鑑。20世紀50年代初產生的自尋最優系統和用巧妙反饋方式使系統能在較廣範圍內正常工作的條件反饋系統,是建造適應控制系統的最初嘗試。1958年前後設計成飛機自動駕駛儀的模型參考適應控制系統,這種系統能在空氣動力特性變化很大的情形下正常工作。R.E.卡爾曼提出的不斷進行最小二乘遞推估計並按此估計值修改控制器參數的自動最最佳化控制系統和R.貝爾曼從動態規劃觀點提出的多步決策適應過程的一般數學模型,提出了建立適應控制系統的基本原理和可能途徑。到70年代,由於計算機的普遍使用和自動控制理論的進步,適應控制技術遂得到很大發展。微處理機的問世又推動了適應控制系統開始得到較為廣泛的套用。適應控制系統的主要類型有:自校正調節器、模型參考適應控制系統、自鎮定系統、自尋最優系統、自組織系統和學習控制系統等。
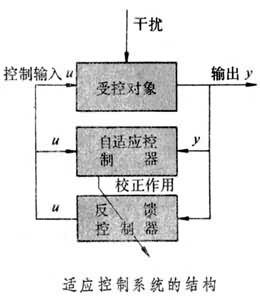 圖中畫出適應控制系統的結構。它比普通的反饋控制系統增加了一個適應控制迴路。適應控制器根據受控對象的輸入輸出關係來辨識(見系統辨識)受控對象和外部干擾的特性,隨後根據辨識的結果校正反饋控制規律,以適應環境特性的變化。無論辨識還是控制規律的設計,都可採用不同的方法。它們的不同組合能形成適應控制的不同方案。當系統的環境特性及其變化可以用一些參數來描述時,就可對這些參數進行辨識並使反饋控制規律跟蹤這些參數的變化。這種系統稱為參數適應控制系統。對於複雜的情況,常常只能用一些籠統的數量指標來反映控制過程的品質,並以品質的優劣作為校正控制規律的依據,這就是品質適應控制系統。對控制規律進行的校正也有多種方式。可從根本上改變控制器的結構(由一種結構改換到另一種結構)的控制系統,稱為變結構系統。只改變控制器的一些參數(如放大倍數)的方式,稱為參數校正式系統。如果利用校正作用直接去影響控制信號的大小,則稱為信號綜合式系統。
圖中畫出適應控制系統的結構。它比普通的反饋控制系統增加了一個適應控制迴路。適應控制器根據受控對象的輸入輸出關係來辨識(見系統辨識)受控對象和外部干擾的特性,隨後根據辨識的結果校正反饋控制規律,以適應環境特性的變化。無論辨識還是控制規律的設計,都可採用不同的方法。它們的不同組合能形成適應控制的不同方案。當系統的環境特性及其變化可以用一些參數來描述時,就可對這些參數進行辨識並使反饋控制規律跟蹤這些參數的變化。這種系統稱為參數適應控制系統。對於複雜的情況,常常只能用一些籠統的數量指標來反映控制過程的品質,並以品質的優劣作為校正控制規律的依據,這就是品質適應控制系統。對控制規律進行的校正也有多種方式。可從根本上改變控制器的結構(由一種結構改換到另一種結構)的控制系統,稱為變結構系統。只改變控制器的一些參數(如放大倍數)的方式,稱為參數校正式系統。如果利用校正作用直接去影響控制信號的大小,則稱為信號綜合式系統。 按照適應控制原理設計的控制系統常常會出現失穩或參數發散的現象,這使人們認識到穩定性是適應控制系統的重要研究課題。對於適應控制系統,即使受控對象是線性定常系統,它的閉環控制系統也是變係數或帶有隨機干擾的非線性系統,很難由一般分析方法給出穩定性判據。但是,有相當多的適應控制系統的穩定性問題,可以用李雅普諾夫穩定性理論和波波夫超穩定性理論來研究。模型參考適應控制系統和自校正適應控制系統實質上是一致的,它們的穩定性分析方法也相互適用。在穩定性分析的過程中還能附帶給出一些關於參數選擇的信息。李雅普諾夫穩定性理論和超穩定性理論的主要缺點,在於它們要求對系統的模型有十分精確的知識。系統參數的變化可能使整個控制系統失去穩定性。這就推動了對適應控制系統的魯棒性的研究。由於還沒有一般的判據,在實際使用適應控制系統時,往往主要藉助於人工智慧技術來積累經驗或進行邏輯判斷。
自適應控制系統已在船舶駕駛、過程控制等方面取得了一些成功的套用。由於理論還不夠完善,一般在完成設計後還需要用仿真技術進行最後的校驗。
參考書目
R.Bellman,Adaptive Control Processes:A Guided Tour,Princeton Univ. Press,Princeton, New Jersey,1961.
Landau I.D.,Adaptive Control: the Model Reference Approach, Macrcel Dekker Inc., New York,1979.
