
簡介
 水下機器人
水下機器人水下機器人主要運用在海上救援,井下行道地形複雜,運煤軌道等條件都將限制起作用發揮。水下環境惡劣危險,人的潛水深度有限,所以水下機器人已成為開發海洋的重要工具。
無人遙控潛水器主要有,有纜遙控潛水器和無纜遙控潛水器兩種,其中有纜避控潛水器又分為水中自航式、拖航式和能在海底結構物上爬行式三種。
它的工作方式是由水面母船上的工作人員,通過連線潛水器的臍帶提供動力,操縱或控制潛水器,通過水下電視、聲吶等專用設備進行觀察,還能通過機械手,進行水下作業。目前,無人遙控潛水器主要有,有纜遙控潛水器和無纜遙控潛水器兩種,其中有纜避控潛水器又分為水中自航式、拖航式和能在海底結構物上爬行式三種。
發展歷程
 水下機器人
水下機器人從1953年至1974年為第一階段,主要進行潛水器的研製和早期的開發工作。先後研製出20多艘潛水器。其中美國的CURV系統在西班牙海成功地回收一枚氫彈,引起世界各國的重視。
1953年第一艘無人遙控潛水器問世,到1974年的20年裡,全世界共研製了20艘無人遙控潛水器。特別是1974年以後,由於海洋油氣業的迅速發展,無人遙控潛水器也得到飛速發展。
無人有纜潛水器的研製80年代進入了較快的發展時期。1975至1985年是遙控潛水器大發展時期。到1981年,無人遙控潛水器發展到了400餘艘,其中90%以上是直接;或間接為海洋石油開採業服務的。海洋石油和天然氣開發的需要,推動了潛水器理論和套用的研究,潛水器的數量和種類都有顯著地增長。載人潛水器和無人遙控潛水器(包括
 水下機器人
水下機器人1985年,潛水器又進入一個新的發展時期。80年代以來,中國也開展了水下機器人的研究和開發,研製出“海人”1號(HR-1)水下機器人,成功地進行水下實驗。1988年,無人遙控潛水器又得到長足發展,猛增到958艘,比1981年增加了110%。這個時期增加的潛水器多數為有纜遙控潛水器,大約為800艘上下,其中420餘艘是直接為海上池氣開採用的。無人無纜潛水器的發展相對慢一些,只研製出26艘,其中工業用的儀8艘,其他的均用於軍事和科學
 水下機器人
水下機器人1980年法國國家海洋開發中心建造了“逆戟鯨”號無人無纜潛水器,最大潛深為6000米。“逆朗鯨”號潛水器先後進行過130多次深潛作業,完成了太平洋海底錳結核調查海底峽谷調查、太平洋和地中海海底電纜事故調查、洋中脊調查等重大課題任務。1987年,法國國家海彈開發中心又與一家公司合作,共同建造“埃里特”聲學遙控潛水器。用於水下鑽井機檢查、海底油機設備安裝、油管輔設、錨纜加固等複雜作業。這種聲學遙控潛水器的智慧型程度要比“逆戟鯨”號高許多。
1987年,日本海事科學技術中心研究成功深海無人遙控潛水器“海魨3K”號,可下潛3300米。研製“海魨3K”號的目的,是為了在載人潛水之前對預定潛水點進行調查而設計的,供專門從事深海研究的,同時,也可利用“海魨3K”號進行海底救護。“海魨3K”號屬於有纜式潛水器,在設計上有前後、上下、左右三個方向各配置兩套動力裝置,基本能滿足深海採集樣品的需要。1988年,該技術中心配合“深海6500”號載人潛水器進行深海調查作業的需要,建造了萬米級無人遙控潛水器。這種潛水器由工作母船進行控制操作,可以較長時間進行深海調查。這種潛水器可望在1992年內建成,總投資為40億日元。日本對於無人有纜潛水器的研製比較重視,不僅有研究項目,而且還有較大型的長遠計畫。
1988年,美國國防部的國防高級研究計畫局與一家研究機構合作,投資2360萬美元研製兩艘無人無纜潛水器。
1990年,無人無纜潛水器研製成功,定名為“UUV”號。這種潛水器重量為6.8噸,性能特別好,最大航速10節,能在44秒內由0加速到10節,當航速大於3節時,航行深度控制在土1米,導航精度約0.2節/小時,潛水器動力採用銀鋅電池。這些技術條件有助於高水平的深海研究。另外,美國和加拿大合作將研製出能穿過北極冰層的無人無纜潛水器。
中國水下機器人2009年首次在北冰洋海域冰下調查。“大洋一號”科學考察船第21航次就在開始不久的第三航段考察中,“大洋一號”首次使用水下機器人“海龍2號”在東太平洋海隆“鳥巢”黑煙囪區觀察到罕見的巨大黑煙囪,並用機械手準確抓獲約7千克黑煙囪噴口的硫化物樣品。這一發現標誌著中國成為國際上少數能使用水下機器人開展洋中脊熱液調查和取樣研究的國家之一。依靠“大洋一號”船的精確動力定位,中國自主研製的水下機器人“海龍2號”準確降落抵達“鳥巢”黑煙囪區海底,並展開了攝像觀察、熱液環境參數測量。
2012年10月,中國首款“功能模組”理念智慧型水下機器人問世。哈爾濱工程大學船舶工程學院5人團隊,在指導教師張鐵棟帶領下,依託水下機器人國防重點實驗室,歷時一年自主設計出國內首款“多功能智慧型水下機器人”,首次將“功能模組”理念套用於水下機器人領域。該款機器人可根據需要選擇不同模組隨時“換芯”、隨時變身,可應對各種複雜水下作業。
這款機器人獲得首屆“全國海洋航行器設計與製作大賽”實物製作類特等獎。該項目中自主研發套用的永磁式平面磁傳動推進器、永磁式平面磁傳動機械手、改裝水密接外掛程式均屬國內首創,具有重要的推廣價值。
2012年日本正在實施一項包括開發先進無人遙控潛水器的大型規劃。這種無人有纜潛水器系統在遙控作業、聲學影像、水下遙測全向推力器、海水傳動系統、陶瓷套用技術水下航行定位和控制等方面都要有新的開拓與突破。這項工作的直接目標是有效地服務於200米以內水深的油氣開採業,完全取代由潛水人員去完成的危險水下作業。
在無人有纜潛水技術方面,始終保持了明顯的超前發展的優勢。根據歐洲尤里卡計畫,英國、義大利將聯合研製無人遙控潛水器。這種潛水器性能優良,能在6000米水深持續工作250小時,比正在使用的只能在水下4000米深度連續工作只有l2小時的潛水器性能優良的多。按照尤里卡EU-191計畫還將建造兩艘無人遙控潛水器,一艘為有纜式潛水器,主要用於水下檢查維修;另一艘為無人無纜潛水器,主要用於水下測量。這項潛水工程計畫將由英國;義大利、丹麥等國家的l7個機構參加。英國科學家研製的“小賈森”有纜潛水器有其獨特的技術特點,它是採用計算機控制,並通過光纖溝通潛水器與母船之間的聯繫。母船上裝有4台專用計算機,分別用於處理海底照相機獲得的資料,處理監控海彈環境變化的資料,處理海面環境變化的資料,處理由潛水器傳輸回來的其他有關技術資料等。母船將所有獲得的資料。經過整理,通過微波傳送到加利福尼亞太平洋格羅夫研究所的實驗室,並貯存在資料庫里。
2015年3月19日,中國自主建造的首艘深水多功能工程船——海洋石油286進行深水設備測試,首次用水下機器人將五星紅旗插入近3000米水深海底,這是國內首次用水下機器人將五星紅旗插入近3000米水深的南海。
結構
 水下機器人
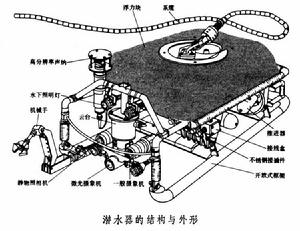
水下機器人典型的遙控潛水器是由水面設備(包括操縱控制台、電纜絞車、吊放設備、供電系統等)和水下設備(包括中繼器和潛水器本體)組成。潛水器本體在水下靠推進器運動,本體上裝有觀測設備(攝像機、照相機、照明燈等)和作業設備(機械手、切割器、清洗器等)。
潛水器的水下運動和作業,是由操作員在水面母艦上控制和監視。靠電纜向本體提供動力和交換信息。中繼器可減少電纜對本體運動的干擾。新型潛水器從簡單的遙控式向監控式發展,即由母艦計算機和潛水器本體計算機實行遞階控制,它能對觀測信息進行加工,建立環境和內部狀態模型。操作人員通過人機互動系統以面向過程的抽象符號或語言下達命令,並接受經計算機加工處理的信息,對潛水器的運行和動作過程進行監視並排除故障。開始研製智慧型水下機器人系統。操作人員僅下達總任務,機器人就能根據識別和分析環境,自動規划行動、迴避障礙、自主地完成指定任務。
無人有纜潛水器的發展趨勢有以下優點:一是水深普遍在6000米;二是操縱控制系統多採用大容量計算機,實施處理資料和進行數字控制;三是潛水器上的機械手採用多功能力反饋監控系統:四是增加推進器的數量與功率,以提高其頂流作業的能力和操縱性能。此外,還特別注意潛水器的小型化和提高其觀察能力。
功能
潛水器的水下運動和作業,是由操作員在水面母艦上控制和監視。靠電纜向本體提供動力和交換信息。中繼器可減少電纜對本體運動的干擾。新型潛水器從簡單的遙控式向監控式發展,即由母艦計算機和潛水器本體計算機實行遞階控制,它能對觀測信息進行加工,建立環境和內部狀態模型。
操作人員通過人機互動系統以面向過程的抽象符號或語言下達命令,並接受經計算機加工處理的信息,對潛水器的運行和動作過程進行監視並排除故障。近年來開始研製智慧型水下機器人系統。操作人員僅下達總任務,機器人就能根據識別和分析環境,自動規划行動、迴避障礙、自主地完成指定任務。
趨勢
無人有纜潛水器的發展趨勢有以下見點:一是水深普遍在6000米;二是操縱控制系統多採用大容量計算機,實施處理資料和進行數字控制;三是潛水器上的機械手採用多功能,力反饋監控系統:四是增加推進器的數量與功率,以提高其頂流作業的能力和操縱性能。此外,還特別注意潛水器的小型化和提高其觀察能力。
套用領域
安全搜救
可用於檢查大壩、橋墩上是否安裝爆炸物以及結構好壞情況遙控偵察、危險品靠近檢查
水下基陣協助安裝/拆卸
船側、船底走私物品檢測(公安、海關)
水下目標觀察,廢墟、坍塌礦井搜救等;
搜尋水下證據(公安、海關)
海上救助打撈、近海搜尋;
2011年水下機器人最深能在6000米的海底世界,以每小時3至6公里的速度行走,前視、下視雷達給了它“好視力”,隨身攜帶的照相機、攝像機和精確導航系統等,讓它“過目不忘”。2011年伍茲霍爾海洋研究所提供的水下機器人在4000平方公里的海域中僅僅花了幾天時間便找到了法航航班的殘骸,而此前各種船隻飛機尋找兩年無果。
MH370失聯客機截至2014年4月7日尚未找到,澳大利亞海事安全局聯合協調中心召開發布會,搜救行動處境微妙,需要不斷精確搜尋位置,不會放棄希望,搜尋區域最深將達到5000米,將使用水下機器人搜尋黑匣子信號。
管道檢查
可用於市政飲用水系統中水罐、水管、水庫檢查排污/排澇管道、下水道檢查
洋輸油管道檢查;
跨江、跨河管道檢查
船舶河道海洋石油
船體檢修;水下錨、推進器、船底探查
碼頭及碼頭樁基、橋樑、大壩水下部分檢查;
航道排障、港口作業
鑽井平台水下結構檢修、海洋石油工程;
科研教學
水環境、水下生物的觀測、研究和教學海洋考察;
冰下觀察
水下娛樂
水下電視拍攝、水下攝影潛水、划船、遊艇;
看護潛水員,潛水前合適地點的選擇
能源產業
核電站反應器檢查、管道檢查、異物探測和取出水電站船閘檢修;
水電大壩、水庫堤壩檢修(排沙洞口、攔污柵、泄水道檢修)
考古
水下考古、水下沉船考察漁業
深水網箱漁業養殖,人工漁礁調查無人無纜潛水器尚處於研究、試用階段,還有一些關鍵技術問題需要解決。無人無纜潛水器將向遠程化、智慧型化發展,其活動範圍在250~5000公里的半,徑內。這就要求這種無人無纜潛水器有能保證長時間工作的動力源。在控制和信息處理系統中,採用圖像識別、人工智慧技術、大容量的知識庫系統,以及提高信息處理能力和精密的導航定位的隨感能力等。如果這些問題都能解決了,那么無人無纜潛水器就能是名副其實的海洋智慧型機器人。海洋智慧型機器人的出現與廣泛使用,為人類進入海洋從事各種海洋產業活動提供了技術保證。
中國首次使用
 中國水下機器人首次在北冰洋海域冰下調查
中國水下機器人首次在北冰洋海域冰下調查“大洋一號”科學考察船第21航次自2009年7月18日從廣州起航。就在開始不久的第三航段考察中,“大洋一號”首次使用水下機器人“海龍2號”在東太平洋海隆“鳥巢”黑煙囪區觀察到罕見的巨大黑煙囪,並用機械手準確抓獲約7千克黑煙囪噴口的硫化物樣品。這一發現標誌著我國成為國際上少數能使用水下機器人開展洋中脊熱液調查和取樣研究的國家之一。
“鳥巢”黑煙囪區位於東太平洋赤道附近洋中脊擴張中心,水深約2700米,是2008年“大洋一號”第20航次第三航段在該區新發現的5個熱液噴口區之一,因其地貌形態似國家體育場“鳥巢”而得名。
據第三航段首席科學家陶春輝介紹,依靠“大洋一號”船的精確動力定位,中國自主研製的水下機器人“海龍2號”準確降落抵達“鳥巢”黑煙囪區海底,並展開了攝像觀察、熱液環境參數測量。發現的巨大黑煙囪高達26米,直徑約4.5米,頂部噴冒滾滾黑煙,煙囪外壁從底到頂有蝦和管狀蠕蟲群落等熱液生物,其周邊分布著大小形態不一的黑煙囪群落,形成一個好似雲南石林的海底地貌。
“大洋一號”已經圓滿結束的一、二航段考察也取得了大量成果和資料,創造了聲學深拖首次成功套用於大洋調查、首次取得高精度海底地形和淺地層資料、首次發現兩類海山淺埋藏型成礦結殼、首次實現光纜淺鑽成功取樣等多項第一,為後續航段調查工作的順利開展奠定了堅實基礎。
產品
VideoRay Scout
 TRITON LOGGING公司sawfish水下伐木機器人
TRITON LOGGING公司sawfish水下伐木機器人系 統: 深 度: 最大工作水深76米
速 度: 最大行進速度0.98米/秒
潛 器: 攝像頭: 420線解析度、0.3lux彩色攝像頭(廣角、固定焦距)
照明燈: 2個20W鹵素燈,燈光可調
臍帶纜: 40米零浮力臍帶纜
控制台: 顯 示: 5寸液晶顯示屏
輸 出: 有視頻輸出接口,可接記錄設備
選 件: 加長臍帶纜、TDS臍帶纜收放系統、12伏800瓦逆變器、攜帶型電源包、現場維修備件包。
VideoRay Explorer
系 統: 深 度: 最大工作水深76米;可自動定深
速 度: 最大行進速度0.98米/秒
潛 器: 攝像頭: 570線解析度、0.3lux彩色攝像頭(廣角可調焦);180度俯仰“搖頭”
照明燈: 2個20瓦鹵素燈
感測器: 深度壓力感測器、羅經、開機時間累加計數器
臍帶纜: 76米零浮力臍帶纜
控制台: 顯 示: 5寸液晶顯示屏
輸 出: 有視頻輸出接口,可接記錄設備
選 件: 加長臍帶纜、TDS臍帶纜收放系統、12伏800瓦逆變器、攜帶型電源包、現場維修備件包。
VideoRay Pro
系 統: 深 度: 最大工作水深152米;可自動定深
速 度: 最大行進速度1.34米/秒
潛 器: 攝像頭: 前面:570線解析度、0.3lux彩色(廣角可調焦)攝像頭;180 度俯仰“搖頭”;
後面:430線解析度、0.1lux黑白攝像頭
照明燈: 前面:2個20瓦鹵素燈
後面:超高亮度LED燈陣
感測器: 深度壓力感測器、羅經、開機時間累加計數器
其 它: 有感測器接口
臍帶纜: 76米零浮力臍帶纜
控制台: 顯 示: 用戶自行配置顯示器
輸 出: 有視頻輸出接口,可接顯示、記錄設備
選 件: 加長臍帶纜、TDS臍帶纜收放系統、12伏800瓦逆變器、攜帶型電源包、100毫米大推力水平推進器、15寸大螢幕顯示器、大浮材(用於增加感測器)、計算機(無線或網際網路)控制、音頻注釋系統、記錄設備、機械手、目標尺度估計雷射器、專業電池包、現場維修備件包、定位系統、圖像聲納、輻射感測器、金屬測厚計、多參數水質檢測感測器等。
VideoRay Pro3 XE
系 統: 深 度: 最大工作水深152米;可自動定深
速 度: 最大行進速度1.34米/秒
電 源: 包含12VDC、800瓦逆變器,可用直流供電
潛 器: 攝像頭: 前面:570線解析度、0.3lux彩色(廣角可調焦)攝像頭;180 度俯仰“搖頭”;
後面:430線解析度、0.1lux黑白攝像頭
照明燈: 前面:2個20瓦鹵素燈
後面:超高亮度LED燈陣
感測器: 深度壓力感測器、羅經、開機時間累加計數器
其 它: 包含大浮材(用於增加感測器)、有感測器接口
臍帶纜: 116米零浮力臍帶纜;包含TDS臍帶纜收放系統
控制台: 顯 示: 15寸液晶顯示屏
輸 出: 有視頻輸出接口,可接顯示、記錄設備
記 錄: 包含記錄設備,需要但不包含筆記本
其 它: 包含計算機控制、無線控制
選 件: 加長臍帶纜、攜帶型電源包、100毫米大推力水平推進器、音頻注釋系統、機械手、目標尺度估計雷射器、專業電池包、現場維修備件包、定位系統、圖像聲納、輻射感測器、金屬測厚計、多參數水質檢測感測器等。
VideoRay Pro3 XE GTO與VideoRay Pro3 XE性能一樣,區別在於Pro3 XE GTO上安裝的是100毫米的大推力水平推進器,相應的機器人最大行進速度達到2.10米/秒並且選件中可加多波束聲納.
VideoRay Deep Blue XE
系 統: 深 度: 最大工作水深305米;可自動定深
速 度: 最大行進速度2.10米/秒
電 源: 包含12VDC、800瓦逆變器,可用直流供電
潛 器: 攝像頭: 前面:570線解析度、0.3lux彩色(廣角可調焦)攝像頭;180 度俯仰“搖頭”範圍;
後面:430線解析度、0.1lux黑白攝像頭
照明燈: 前面:2個20瓦鹵素燈;後面:超高亮度LED燈陣;燈光都可調
推進器: 兩個水平推進器直徑100毫米
感測器: 深度壓力感測器、羅經、開機時間累加計數器
其 它: 包含大浮材、感測器接口、專業電池包
臍帶纜: 345米臍帶纜:其中305米負浮力臍帶纜,40米零浮力臍帶纜;包含TDS臍帶纜收放系統
控制台: 顯 示: 15寸液晶顯示屏
輸 出: 有視頻輸出接口,可接顯示、記錄設備
記 錄: 包含記錄設備,需要但不包含筆記本
其 它: 包含計算機控制、無線控制
選 件: 加長臍帶纜、現場維修備件包、攜帶型電源包、音頻注釋系統、機械手、目標尺度估計雷射器、多波束或多頻圖像聲納、定位系統、金屬測厚計、輻射感測器、YSI水質檢測感測器等。
M1000 ROV
系 統: 深 度: 最大工作水深300米
速 度: 最大行進速度1.54米/秒
電 源: 100~240VAC(50/60Hz),最大功率1800W
潛 器: 攝像頭: 480線解析度、0.01lux低照度彩色攝像頭,帶雲台
600線解析度、0.0003Lux高解析度黑白攝像頭,帶雲台
照明燈: 2個75瓦照明燈,燈光可調
推進器: 四個無刷推進器(單推進器推力0~7.5公斤,推力可調)
負 載: 2.3公斤
臍帶纜: 150米零浮力臍帶纜
控制台: 顯 示: 15寸液晶顯示屏
優 點: 框架式結構、無刷直流磁偶合推進器、攝像頭都帶雲台控制功能、可自動定深和自動定向
選 件: 加長臍帶纜、臍帶纜收放系統、聲納、機械手、推進器、備件包
優缺點
優點
水下機器人可在高度危險環境、被污染環境以及零可見度的水域代替人工在水下長時間作業,水下機器人上一般配備聲吶系統、攝像機、照明燈和機械臂等裝置,能提供實時視頻、聲吶圖像,機械臂能抓起重物,水下機器人在石油開發、海事執法取證、科學研究和軍事等領域得到廣泛套用。
缺點
由於水下機器人運行的環境複雜,水聲信號的噪聲大,而各種水聲感測器普遍存在精度較差、跳變頻繁的缺點,因此水下機器人運動控制系統中,濾波技術顯得極為重要。水下機器人運動控制中普遍採用的位置感測器為短基線或長基線水聲定位系統,速度感測器為都卜勒速度計會影響水聲定位系統精度。因素主要包括聲速誤差、應答器回響時間的丈量誤差、應答器位置即間距的校正誤差。而影響都卜勒速度計精度的因素主要包括聲速c、海水中的介質物理化學特性、運載器的顛簸等。
