
主要作用
1、以小功率指令信號去控制大功率負載;
2、在沒有機械連線的情況下,由輸入軸控制位於遠處的輸出軸,實現遠距同步傳動;
3、使輸出機械位移精確地跟蹤電信號,如記錄和指示儀表等。
簡介
 伺服系統
伺服系統伺服系統最初用於船舶的自動駕駛、火炮控制和指揮儀中,後來逐漸推廣到很多領域,特別是自動車床、天線位置控制、飛彈和飛船的制導等。採用伺服系統主要是為了達到下面的幾個目的:①以小功率指令信號去控制大功率負載。火炮控制和船舵控制就是典型的例子。②在沒有機械連線的情況下,由輸入軸控制位於遠處的輸出軸,實現遠距同步傳動。③使輸出機械位移精確地跟蹤電信號,如記錄和指示儀表等。
發展歷史
伺服源自英文單詞“Servo”,顧名思義,就是指系統跟隨外部指令進行人們所期望的運動,而其中的運動要素包括位置、速度和力矩等物理量。回顧伺服系統的發展歷程,從最早的液壓、氣動到如今的電氣化,由伺服電機、反饋裝置與控制器組成的伺服系統已經走過了近50個年頭。如今,隨著技術的不斷成熟,交流伺服電機技術憑藉其優異的性價比,逐漸取代直流電機成為伺服系統的主導執行電機。交流伺服系統技術的成熟也使得市場呈現出快速的多元化發展,並成為工業自動化的支撐性技術之一。伺服系統的發展趨勢:即高精度、高速度、大功率。他解釋說,伺服系統的發展要充分利用電子和計算機技術,採用數字式伺服系統,利用微機實現調節控制,增強軟體控制功能,排除模擬電路的非線性誤差和調整誤差以及溫度漂移等因素的影響,這可大大提高伺服系統的性能,並為實現最優控制、自適應控制創造條件。同時,要開發高精度、快速檢測元件與高性能的伺服電機(執行元件)。
我國發展現狀
《中國伺服系統行業市場前瞻與投資戰略規劃分析報告》顯示,我國製造業產業升級的不斷推進,為我國伺服產業的發展提供了巨大的市場,近年來,隨著數控工具機、包裝機械、電子專用設備等行業繼續保持較好發展以及交流伺服技術的日益成熟,新興行業如新能源行業中的風電產業伺服技術的套用使得我國伺服市場迅速發展,2010年,我國伺服市場同比增長39.7%,市場規模達到39.9億元。很多有遠識的國產廠商正加大研發力度提升其產品的性能,進而擴大其品牌的號召力,國產伺服廠商改變進口壟斷格局將指日可待。由此預測,未來五年,我國伺服系統行業受益於產業升級的影響,仍將保持20%以上的增長速度,至2015年,我國伺服系統行業市場規模有望突破100億元,其中,國產伺服產品的市場占有率將達到40%左右。
發展趨勢
 伺服系統
伺服系統(1)交流化
伺服技術將繼續迅速地由DC伺服系統轉向AC伺服系統。從目前國際市場的情況看,幾乎所有的新產品都是AC伺服系統。在工業已開發國家,AC伺服電機的市場占有率已超過80%。國內生產AC伺服電機的廠家也越來越多,正逐步超過生產DC伺服電機的廠家。可以預見,在不遠的將來,除了在某些微型電機領域之外,AC伺服電機將完全取代DC伺服電機。
(2)全數位化
採用新型高速微處理器和專用數位訊號處理機(DSP)的伺服控制單元將全面代替以模擬電子器件為主的伺服控制單元,從而實現完全數位化的伺服系統。全數位化的實現,將原有的硬體伺服控制變成了軟體伺服控制,從而使在伺服系統中套用現代控制理論的先進算法(如:最優控制、人工智慧、模糊控制、神經元網路等)成為可能。
(3)採用新型電力電子半導體器件
目前,伺服控制系統的輸出器件多採用開關頻率很高的新型功率半導體器件,主要有大功率電晶體(GTR)、功率場效應管(MOSFET)和絕緣門極電晶體(IGBT)等。這些先進器件的套用顯著降低了伺服單元輸出迴路的功耗,提高了系統的回響速度,降低了運行噪聲。尤其是,最新型的伺服控制系統已開始使用一種把控制電路功能和大功率電子開關器件集成在一起的新型模組,稱為智慧型控制功率模組(IntelligentPowerMod—ules,簡稱IPM)。這種器件將輸人隔離、能耗制動、過溫、過壓、過流保護及故障診斷等功能全部集成於一個不大的模組中。其輸入邏輯電平與TTL信號完全兼容,與微處理器的輸出可直接接口。它的套用顯著地簡化了伺服單元的設計,並實現了伺服系統的小型化和微型化。
(4)高度集成化
新的伺服系統產品改變了將伺服系統劃分為速度伺服單元與位置伺服單元2個模組的做法,代之以單一、高度集成化、多功能的控制單元。同一個控制單元,只要通過軟體設定系統參數就可改變其性能,既可以使用電機本身配置的感測器構成半閉環調節系統,又可以通過接口與外部的位置或速度或力矩感測器構成高精度的全閉環調節系統。高度的集成化還顯著縮小了整個控制系統的體積,使伺服系統的安裝與調試工作都得到簡化。
(5)智慧型化
智慧型化是當前一切工業控制設備的流行趨勢,伺服驅動系統作為一種高級的工業控制裝置也不例外。最新數字化的伺服控制單元通常都設計為智慧型型產品,其智慧型化特點表現在:①都具有參數記憶功能。系統的所有運行參數都可通過人機對話的方式由軟體來設定,保存在伺服單元內部,通過通信接口,這些參數甚至可以在運行途中由上位計算機加以修改,套用方便;②都具有故障自診斷與分析功能。無論什麼時候,只要系統出現故障,就會將故障類型及可能引起故障的原因通過用戶界面清楚地顯示出來,這就簡化了維修與調試的複雜性;③有的伺服系統還具有參數自整定的功能。眾所周知,閉環調節系統的參數整定是保證系統性能指標的重要環節,也是需要耗費較多時間與精力的工作。帶有自整定功能的伺服單元可通過幾次試運行,自動將系統的參數整定出來,並自動實現其最最佳化。對於使用伺服單元的用戶來說,這是新型伺服系統最具吸引力的特點之一。
(6)模組化和網路化
在國外,以工業區域網路技術為基礎的工廠自動化(FactoryAutomation,簡稱FA)工程技術在近lO年來得到了長足發展,並顯示出良好的發展勢頭。為適應這一發展趨勢,最新的伺服系統都配置了標準的串列通信接口(如RS一232C或RS一422接口等)和專用的區域網路接口。這些接口的設定顯著增強了伺服單元與其它控制設備問的互聯能力,從而,與CNC系統問的連線也變得簡單,只需1根電纜或光纜就可將數台,甚至數十台伺服單元與上位計算機連線為整個數控系統。也可通過串列接口與可程式控制器(PLC)的數控模組相連。
綜上所述,伺服系統將向兩個方向發展:一個是滿足一般工業套用要求,對性能指標要求不高的套用場合,追求低成本、少維護、使用簡單等特點的驅動產品,如變頻電機、變頻器等;另一個就是代表著伺服系統發展水平的主導產品——伺服電機、伺服控制器,追求高性能、高速度、數位化、智慧型型、網路化的驅動控制,以滿足用戶較高的套用要求。
性能指標
伺服系統由伺服驅動裝置和驅動元件組成,高性能的伺服系統還有檢測裝置,用來反饋實際的輸出狀態。在交流伺服系統中,電動機的類型有永磁同步交流伺服電機(PMSM)和感應異步交流伺服電機(IM),其中永磁同步電機具備十分優良的低速性能,可以實現弱磁高速控制,具有調速範圍寬廣、動態特性和效率高的優點,已經發展成為伺服系統的主流之選。而異步伺服電機雖然結構堅固、價格低廉,但在特性與效率上與永磁同步電機存在差距,只在大功率場合得到重視。隨著交流伺服系統的套用範圍逐漸拓寬,其性能的評價標準也得到廣泛關注。性能指標大致分為調速範圍、定位精度、穩速精度、動態回響和運行穩定性等方面,低檔的伺服系統調速範圍在1:1000以上,一般的在1:5000~1:10000,高性能的可以達到1:100000以上;定位精度一般都要達到±1個脈衝,尤其是低速下的穩速精度。比如給定1rpm時,一般的在±0.1rpm以內,高性能的可以達到±0.01rpm以內;動態回響方面,通常衡量的指標是系統最高回響頻率,即給定最高頻率的正弦速度指令,系統輸出速度波形的相位滯後不超過90度或者幅值不小於50%。進口三菱伺服電機MR-J3系列的回響頻率高達900Hz,而國內主流產品的頻率在200~500Hz;運行穩定性主要是指系統在電壓波動、負載波動、電機參數變化、上位控制器輸出特性變化、電磁干擾,以及其他特殊運行條件下,維持穩定運行並保證一定的性能指標的能力。這方面國產產品與世界先進產品相比差距較大。
基於電機穩態數學模型的電壓頻率控制方法和開環磁通軌跡控制方法都難以達到良好的伺服特性,目前普遍套用的是基於永磁電機動態解耦數學模型的矢量控制方法,這是現代伺服系統的核心控制方法。雖然人們為了進一步提高控制特性和穩定性,提出了反饋線性化控制、滑模變結構控制、自適應控制等理論,還有不依賴數學模型的模糊控制和神經元網路控制方法,但是大多在矢量控制的基礎上附加套用這些控制方法。
技術要求
1、系統精度伺服系統精度指的是輸出量復現輸入信號要求的精確程度,以誤差的形式表現,可概括為動態誤差,穩態誤差和靜態誤差三個方面組成.
2、穩定性
伺服系統的穩定性是指當作用在系統上的干擾消失以後,系統能夠恢復到原來穩定狀態的能力;或者當給系統一個新的輸入指令後,系統達到新的穩定運行狀態的能力.
3、回響特性
回響特性指的是輸出量跟隨輸入指令變化的反應速度,決定了系統的工作效率.回響速度與許多因素有關,如計算機的運行速度,運動系統的阻尼和質量等.
4、工作頻率
工作頻率通常是指系統允許輸入信號的頻率範圍.當工作頻率信號輸入時,系統能夠按技術要求正常工作;而其它頻率信號輸入時,系統不能正常工作。
分類
 伺服系統
伺服系統1 、開環系統
開環系統構成主要由驅動電路,執行元件和被控對象三大部分組成。常用的執行元件是步進電機,通常稱以步進電機作為執行元件的開環系統為步進式伺服系統,在這種系統中,如果是大功率驅動時,用步進電機作為執行元件。驅動電路的主要任務是將指令脈衝轉化為驅動執行元件所需的信號。
2 、閉環系統
閉環系統主要由執行元件、檢測單元、比較環節、驅動電路和被控對象五部分組成。在閉環系統中,檢測元件將被控對象移動部件的實際位置檢測出來並轉換成電信號反饋給比較環節。常見的檢測元件有鏇轉變壓器、感應同步器、光柵、磁柵和編碼器等。通常把安裝在電機軸端的檢測元件組成的伺服系統稱為半閉環系統;把安裝在被控對象上的檢測元件組成的伺服系統稱為閉環系統。由於電機軸端和被控對象之間傳動誤差的存在,半閉環伺服系統的精度要比閉環伺服系統的精度低一些。
比較環節的作用是將指令信號和反饋信號進行比較,兩者的差值作為伺服系統的跟隨誤差,經驅動電路,控制執行元件帶動工作檯繼續移動,直到跟隨誤差為零。根據進入比較環節信號的形式以及反饋檢測方式,閉環(半閉環)系統可分為脈衝比較伺服系統、相位比較伺服系統和幅值比較伺服系統三種。
由於比較環節輸出的信號比較微弱,不足以驅動執行元件,故需對其進行放大,驅動電路正是為此而設定的。
執行元件的作用是根據控制信號,即來自比較環節的跟隨誤差信號,將表示位移量的電信號轉化為機械位移。常用的執行元件有直流寬調速電動機、交流電動機等。
3、直流伺服驅動與交流伺服驅動
70年代和80年代初,數控工具機多採用直流伺服驅動。直流大慣量伺服電機具有良好的寬調速性能,輸出轉矩大,過載能力強,而且,由於電機慣性與工具機傳動部件的慣量相當,構成閉環後易於調整。而直流中小慣量伺服電機及其大功率電晶體脈寬調製驅動裝置,比較適應數控工具機對頻繁啟動、制動,以及快速定位、切削的要求。但直流電機一個最大的特點是具有電刷和機械換向器,這限制了它向大容量、高電壓、高速度方向的發展,使其套用受到限制。
套用
數控工具機一般分為NC控制系統、伺服驅動系統和反饋檢測系統。數控工具機對位置系統要求的伺服性能包括:定位速度和輪廓切削進給速度;定位精度和輪廓切削精度;精加工的表面粗糙度;在外界干擾下的穩定性。這些要求主要取決於伺服系統的靜態、動態特性。對閉環系統來說,總希望系統有較高的動態精度,即當系統有一個較小的位置誤差時,工具機移動部件會迅速反應。下面就位置控制系統影響數控工具機加工要求的幾個方面進行論述。1、加工精度
精度是工具機必須保證的一項性能指標。位置伺服控制系統的位置精度在很大程度上決定了數控工具機的加工精度。因此位置精度是一個極為重要的指標。為了保證有足夠的位置精度,一方面是正確選擇系統中開環放大倍數的大小,另一方面是對位置檢測元件提出精度的要求。因為在閉環控制系統中,對於檢測元件本身的誤差和被檢測量的偏差是很難區分出來的,反饋檢測元件的精度對系統的精度常常起著決定性的作用。可以說,數控工具機的加工精度主要由檢測系統的精度決定。位移檢測系統能夠測量的最小位移量稱做解析度。解析度不僅取決於檢測元件本身,也取決於測量線路。在設計數控工具機、尤其是高精度或大中型數控工具機時,必須精心選用檢測元件。所選擇的測量系統的解析度或脈衝當量,一般要求比加工精度高一個數量級。總之,高精度的控制系統必須有高精度的檢測元件作為保證。例如,數控工具機中常用的直線感應同步器的精度已可達±0.0001mm,即0.1μm,靈敏度為0.05μm,重複精度0.2μm;而圓型感應同步器的精度可達0.5N,靈敏度0.05N,重複精度0.1N。
2、開環放大倍數
在典型的二階系統中,阻尼係數x=1/2(KT)-½,速度穩態誤差e(∞)=1/K,其中K為開環放大倍數,工程上多稱作開環增益。顯然,系統的開環放大倍數是影響伺服系統的靜態、動態指標的重要參數之一。
一般情況下,數控工具機伺服機構的放大倍數取為20~30(1/S)。通常把K<20範圍的伺服系統稱為低放大倍數或軟伺服系統,多用於點位控制。而把K>20的系統稱為高放大倍數或硬伺服系統,套用於輪廓加工系統。
假若為了不影響加工零件的表面粗糙度和精度,希望階躍回響不產生振盪,即要求是取值大一些,開環放大倍數K就小一些;若從系統的快速性出發,希望x選擇小一些,即希望開環放大倍數~增加些,同時K值的增大對系統的穩態精度也能有所提高。因此,對K值的選取是必需綜合考慮的問題。換句話說,並非系統的放大倍數愈高愈好。當輸入速度突變時,高放大倍數可能導致輸出劇烈的變動,機械裝置要受到較大的衝擊,有的還可能引起系統的穩定性問題。這是因為在高階系統中系統穩定性對K值有取值範圍的要求。低放大倍數系統也有一定的優點,例如系統調整比較容易,結構簡單,對擾動不敏感,加工的表面粗糙度好。
3、提高可靠性
數控工具機是一種高精度、高效率的自動化設備,如果發生故障其損失就更大,所以提高數控工具機的可靠性就顯得尤為重要。可靠度是評價可靠性的主要定量指標之一,其定義為:產品在規定條件下和規定時間內,完成規定功能的機率。對數控工具機來說,它的規定條件是指其環境條件、工作條件及工作方式等,例如溫度、濕度、振動、電源、干擾強度和操作規程等。這裡的功能主要指數控工具機的使用功能,例如數控工具機的各種機能,伺服性能等。
平均故障(失效)間隔時間(MTBF)是指發生故障經修理或更換零件還能繼續工作的可修復設備或系統,從一次故障到下一次故障的平均時間,數控工具機常用它作為可靠性的定量指標。由於數控裝置採用微機後,其可靠性大大提高,所以伺服系統的可靠性就相對突出。它的故障主要來自伺服元件及機械傳動部分。通常液壓伺服系統的可靠性比電氣伺服系統差,電磁閥、繼電器等電磁元件的可靠性較差,應儘量用無接觸點元件代替。
目前數控工具機因受元件質量、工藝條件及費用等限制,其可靠性還不很高。為了使數控工具機能得到工廠的歡迎,必須進一步提高其可靠性,從而提高其使用價值。在設計伺服系統時,必須按設計的技術要求和可靠性選擇元器件,並按嚴格的測試檢驗進行篩選,在機械互鎖裝置等方面,必須給予密切注意,儘量減少因機械部件引起的故障。
4、寬範圍調速
在數控工具機的加工中,伺服系統為了同時滿足高速快移和單步點動,要求進給驅動具有足夠寬的調速範圍。 單步點動作為一種輔助工作方式常常在工作檯的調整中使用。伺服系統在低速情況下實現平穩進給,則要求速度必須大於“死區”範圍。所謂“死區”指的是由於靜摩擦力的存在使系統在很小的輸入下,電機克服不了這摩擦力而不能轉動。此外,還由於存在機械間隙,電機雖然轉動,但拖板並不移動,這些現象也可用“死區”來表達。
設死區範圍為a,則最低速度Vmin,應滿足Vmin≥a,由於a≤dK,d為脈衝當量(mm/脈衝);K為開環放大倍數,則
Vmin≥dK
若取d=0.01mm/脈衝,K=30×1/S,則最低速度
Vmin≥a=30×0.01mm/min=18mm/min
伺服系統最高速度的選擇要考慮到工具機的機械允許界限和實際加工要求,高速度固然能提高生產率,但對驅動要求也就更高。此外,從系統控制角度看也有一個檢測與反饋的問題,尤其是在計算機控制系統中,必須考慮軟體處理的時間是否足夠。
由於
fmax=fmax/d
式中:fmax為最高速度的脈衝頻率,kHz;vmax為最高進給速度,mm/min;d為脈衝當量,mm。
又設D為調速範圍,D=vmax/vmin,得
fmax=Dvmin/d=DKd/d=DK
則為最小的間隔時間tmin,即tmin=1/DK。顯然,系統必須在tmin內通過硬體或軟體完成位置檢測與控制的操作。對最高速度而言,vmax的取值是受到tmin的約束。
一個較好的伺服系統,調速範圍D往往可達到800~1000。當今最先進的水平是在脈衝當量d=1μm的條件下,進給速度從0~240m/min範圍內連續可調。
主要結構
伺服系統主要由三部分組成:控制器,功率驅動裝置,反饋裝置和電動機。控制器按照數控系統的給定值和通過反饋裝置檢測的實際運行值的差,調節控制量;功率驅動裝置作為系統的主迴路,一方面按控制量的大小將電網中的電能作用到電動機之上,調節電動機轉矩的大小,另一方面按電動機的要求把恆壓恆頻的電網供電轉換為電動機所需的交流電或直流電;電動機則按供電大小拖動機械運轉。主要特點
1、精確的檢測裝置:以組成速度和位置閉環控制;
2、有多種反饋比較原理與方法:根據檢測裝置實現信息反饋的原理不同,伺服系統反饋比較的方法也不相同。常用的有脈衝比較、相位比較和幅值比較3種;
3、高性能的伺服電動機(簡稱伺服電機):用於高效和複雜型面加工的數控工具機,伺服系統將經常處於頻繁的啟動和制動過程中。要求電機的輸出力矩與轉動慣量的比值大,以產生足夠大的加速或制動力矩。要求伺服電機在低速時有足夠大的輸出力矩且運轉平穩,以便在與機械運動部分連線中儘量減少中間環節;
4、寬調速範圍的速度調節系統,即速度伺服系統:從系統的控制結構看,數控工具機的位置閉環系統可看作是位置調節為外環、速度調節為內環的雙閉環自動控制系統,其內部的實際工作過程是把位置控制輸入轉換成相應的速度給定信號後,再通過調速系統驅動伺服電機,實現實際位移。數控工具機的主運動要求調速性能也比較高,因此要求伺服系統為高性能的寬調速系統。
突出性能
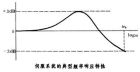
衡量伺服系統性能的主要指標有頻頻寬度和精度。頻頻寬度簡稱頻寬,由系統頻率回響特性來規定,反映伺服系統的跟蹤的快速性。頻寬越大,快速性越好。伺服系統的頻寬主要受控制對象和執行機構的慣性的限制。慣性越大,頻寬越窄。一般伺服系統的頻寬小於15赫,大型設備伺服系統的頻寬則在1~2赫以下。自20世紀70年代以來,由於發展了力矩電機及高靈敏度測速機,使伺服系統實現了直接驅動,革除或減小了齒隙和彈性變形等非線性因素,使頻寬達到50赫,並成功套用在遠程飛彈、人造衛星、精密指揮儀等場所。伺服系統的精度主要決定於所用的測量元件的精度。因此,在伺服系統中必須採用高精度的測量元件,如精密電位器、自整角機、鏇轉變壓器、光電編碼器、光柵、磁柵和球柵等。此外,也可採取附加措施來提高系統的精度,例如將測量元件(如自整角機)的測量軸通過減速器與轉軸相連,使轉軸的轉角得到放大,來提高相對測量精度。採用這種方案的伺服系統稱為精測粗測系統或雙通道系統。通過減速器與轉軸嚙合的測角線路稱精讀數通道,直接取自轉軸的測角線路稱粗讀數通道。伺服系統按所用驅動元件的類型可分為機電伺服系統、液壓伺服系統和氣動伺服系統。
最基本的伺服系統包括伺服執行元件(電機、液壓缸等)、反饋元件和伺服驅動器,但是要讓這個系統運轉起來還需要一個上位機構,PLC,專門的運動控制卡,工控機+PCI卡,以便於給伺服驅動器傳送指令。
典型機型
 伺服系統
伺服系統永磁交流伺服電動機同直流伺服電動機比較:
主要優勢:
1、無電刷和換向器,因此工作可靠,對維護和保養要求低;
2、定子繞組散熱比較方便;
3、慣量小,易於提高系統的快速性;
4、適應於高速大力矩工作狀態;
5、同功率下有較小的體積和重量。
主要劣勢:
1、永磁交流伺服系統採用了編碼器檢測磁極位置,算法複雜;
2、交流伺服系統維修比較麻煩,因為電路結構複雜;
3、交流伺服驅動器可靠性不如直流伺服,因為板件太過於精密。
到20世紀80年代中後期,各公司都已有完整的系列產品。整個伺服裝置市場都轉向了交流系統。早期的模擬系統在諸如零漂、抗干擾、可靠性、精度和柔性等方面存在不足,尚不能完全滿足運動控制的要求,隨著微處理器、新型數字信號處理器(DSP)的套用,出現了數字控制系統,控制部分可完全由軟體進行。
高性能的電伺服系統大多採用永磁同步型交流伺服電動機,控制驅動器多採用快速、準確定位的全數字位置伺服系統。
主要套用
機電一體化及其工具機電氣控制技術的發展概況
機電一體化技術是隨著科學技術不斷發展,生產工藝不斷提出新要求而迅速發展的。在控制方法上主要是從手動到自動;在控制功能上,是從簡單到複雜;在操作上,是由笨重到輕巧。隨著新的控制理論和新型電器及電子器件的出現,又為電氣控制技術的發展開拓了新途徑。傳統工具機電氣控制是繼電器接觸式控制系統,由繼電器、接觸器、按鈕、行程開關等組成,實現對工具機的啟動、停車、有極調速等控制。繼電器接觸式控制系統的優點是結構簡單、維護方便、抗干擾強、價格低,因此廣泛套用於各類工具機和機械設備。在我國繼電器接觸式控制仍然是工具機和其他機械設備最基本的電氣控制形式之一。
在實際生產中,由於大量存在一些用開關量控制的簡單的程式控制過程,而實際生產工藝和流程又是經常變化的,因而傳統的繼電器接觸式控制系統常不能滿足這種要求,因此曾出現了繼電器接觸控制和電子技術相結合的控制裝置,叫做順序控制器。它能根據生產需要改變控制程式,而又遠比電子計算機結構簡單,價格低廉,它是通過組合邏輯元件插接或編程來實現繼電器接觸控制的。但它的裝置體積大,功能也受到一定限制。隨著大規模積體電路和微處理機技術的發展及套用,上述控制技術也發生了根本性的變化,在上世紀70年代出現了將計算機的存儲技術引入順序控制器,產生了新型工業控制器——可程式序控制器(PLC),它兼備了計算機控制和繼電器控制系統兩方面的優點,故在世界各國已作為一種標準化通用裝置普遍套用於工業控制。
為解決占機械總加工量80%左右的單件和小批量生產的自動化難題,50年代出現了數控工具機。它綜合套用了電子、計算機、檢測、自動控制和工具機結構設計等各個技術領域的最新技術成就,它是典型的機電一體化產品。數控工具機經過40年來的發展,品種日益增多,性能不斷完善,其中以輪廓控制的數控工具機和帶有自動換刀裝置和工作檯能自動轉位的數控加工中心發展更為迅速。數控工具機由控制介質、數控裝置、伺服系統和工具機本體等部分組成,其中伺服系統的性能是決定數控工具機加工精度和生產率的主要因素之一。
伺服系統在數控加工中的作用及組成
在自動控制系統中,把輸出量能以一定準確度跟隨輸入量的變化而變化的系統稱為隨動系統,亦稱伺服系統。數控工具機的伺服系統是指以工具機移動部件的位置和速度作為控制量的自動控制系統,又稱為隨動系統。伺服系統由伺服驅動裝置和驅動元件(或稱執行元件伺服電機)組成,高性能的伺服系統還有檢測裝置,反饋實際的輸出狀態。
數控工具機伺服系統的作用在於接受來自數控裝置的指令信號,驅動工具機移動部件跟隨指令脈衝運動,並保證動作的快速和準確,這就要求高質量的速度和位置伺服。以上指的主要是進給伺服控制,另外還有對主運動的伺服控制,不過控制要求不如前者高。數控工具機的精度和速度等技術指標往往主要取決於伺服系統。
套用趨勢
自動控制系統不僅在理論上飛速發展,在其套用器件上也日新月異。模組化、數位化、高精度、長壽命的器件每隔3~5年就有更新換代的產品面市。傳統的交流伺服電機特性軟,並且其輸出特性不是單值的;步進電機一般為開環控制而無法準確定位,電動機本身還有速度諧振區,pwm調速系統對位置跟蹤性能較差,變頻調速較簡單但精度有時不夠,直流電機伺服系統以其優良的性能被廣泛的套用於位置隨動系統中,但其也有缺點,例如結構複雜,在超低速時死區矛盾突出,並且換向刷會帶來噪聲和維護保養問題。新型的永磁交流伺服電機發展迅速,尤其是從方波控制發展到正弦波控制後,系統性能更好,它調速範圍寬,尤其是低速性能優越。同名圖書
航工版
 航空版
航空版出版社:航空工業出版社
出版日期:2006年09月
ISBN:9787801837318[十位:7801837312]
頁數:205
重約:0.414KG
定價:¥28.00
內容提要
本書根據機械設計、製造及自動化,機電一體化,航空航天,自動化控制等專業的需要而編寫。主要內容有伺服系統基礎,伺服系統驅動元件的結構、工作原理、特點及套用,伺服系統檢測器件的結構、工作原理及其使用,各種典型伺服系統的組成原理,伺服系統的計算機控制,伺服系統的誤差分析和伺服系統的設計等。
本書在編寫過程中,力求理論聯繫實際,深入淺出,實用性強。適合作為大專院校本科、研究生的專業基礎教材,也可供從事數控技術、機電一體化產品開發、控制系統設計和航空航天等領域的工程技術人員參考。
圖書目錄
第一章緒論
第一節發展簡況
第二節伺服系統的組成及其基本特徵
第三節伺服系統的分類
第二章位置檢測元件
第一節概述
一、數控工具機對位置檢測元件的要求
二、位置檢測元件的分類和特點
第二節鏇轉變壓器
一、鏇轉變壓器的結構
二、鏇轉變壓器的工作原理
三、鏇轉變壓器的信號處理
第三節感興同步器
一、感應同步器的結構
二、感應同步器的工作原理
三、感應同步器的信號處理
四、感應同步器數字位置測量系統
五、感應同步器的安裝
六、感應同步器的分類和技術參數
第四節脈衝編碼器
一、增量式脈衝編碼器
二、絕對式脈衝編碼器
第五節光柵
一、光柵的分類
二、光柵的結構
三、光柵的工作原理
四、光柵讀數頭
五、光柵檢測裝置的辨向
六、提高光柵分辨精度的措施
七、光柵的安裝
第六節磁尺
思考題與習題
第三章驅動元件
第一節步進電機
一、步進電機的分類
二、步進電機的結構
三、步進電機的工作原理
四、步進電機的主要特性
五、步進電機的主要技術參數及選用
第二節直流伺服電機
一、小慣量直流伺服電機
二、寬調速直流伺服電機
第三節交流伺服電機
一、交流伺服電機的基本結構
二、無刷直流電機
三、正弦波永磁同步電機
四、交流伺服電機的主要技術參數
思考題與習題
第四章步進式伺服系統
第一節環形分配器
一、硬體環形分配器
二、軟體環形分配器
第二節步進電機的驅動功率放大器
一、對功率放大器的要求和功率放大器的分類
二、提高驅動電源性能的措施
三、常見功率放大器
第三節開環控制的伺服系統設計
一、系統方案設計
二、機械系統的設計計算
三、機械系統動態特性分析
四、系統誤差分析
五、機械系統設計分析舉例
六、控制系統設計
思考題與習題
第五章直流伺服系統
第六章交流伺服系統
第七章位置伺服系統
第八章伺服系統性能分析
機工版
作/譯者:錢平出版社:機械工業出版社
出版日期:2005年02月
ISBN:9787111158394[十位:7111158393]
頁數:262
重約:0.433KG
定價:¥25.00
內容提要
本書以數控工具機伺服系統為對象,在闡述伺服系統原理等基礎上,重點介紹了交直流電動機的速度控制系統、步進式伺服系統、直流伺服系統、交流伺服系統。還介紹了位置伺服系統的典型實例。
本書在著重基本概念與原理介紹的同時,注意實際套用。本書可作為機械設計製造及自動化專業套用型本科生的教材和參考書,也可供從事數控技術的工程技術人員參考使用。
圖書目錄
第一章概述
第一節伺服系統的作用及組成
第二節伺服系統的基本要求和特點
一對伺服系統的基本要求
二伺服系統的主要分類
第三節伺服系統的分類
一按調節理論分類
二按使用的驅動元件分類
三按進給驅動和主軸驅動分類
四按反饋比較控制方式分類
習題和思考題
第二章伺服控制基礎知識
第一節電力電子器件的套用
一不可控器件
二半控型器件
三全控型器件
第二節檢驗元件
一速度檢測
二角度檢測
三位置檢測
習題和思考題
第三章步進電動機的控制
第一節步進電動機的工作原理及驅動方法
一步進電動機的種類
二步進電動機的工作原理
三步進電動機的種類
四步進電動機驅動電源設計
五步進電動機與微機的接口技術
第二節步進電動機的開、閉環控制
一步進電動機的開環控制
二步進電動機的閉環控制
第三節步進電動機的最佳點——位控制
第四節步進電動機控制的程式設計
一步進電動機控制信號的產生
二步進電動機的運行控制及程式設計
習題和思考題
第四章直流電動機調速系統
第一節直流電動機概述
一直流電動機的基本結構
二永磁直流伺服電動機及工作原理
第二節直流電動機的單閉環調速系統
一調速的定義
二直流電動機的調速方法
三調速指標
四單閉環直流調速方法
第三節雙閉環直流電動機調速系統
一轉速、電流雙閉環調速系統的組成
二轉速、電流雙閉環調速系統的工作原理
第四節直流脈寬調速控制系統
一概述
二PWM調速系統的控制電路
第五節轉速、電充雙閉環調速系統的工程設計法
一工程設計方法的基本思路
二典型系統及其參數與性能指標的關係
三電流調節
四轉速環設計
五轉速調節器飽和限幅時的超調量和計算
……
第五章無刷直流電動機控制系統
第六章異步電動機調速系統及主軸驅動
第七章三相永磁同步伺服電動機的控制
第八章進給伺服系統
第九章基於DSP晶片為核心構成的伺服系統
