 “黑騎士”無人裝甲概念車
“黑騎士”無人裝甲概念車外形特點
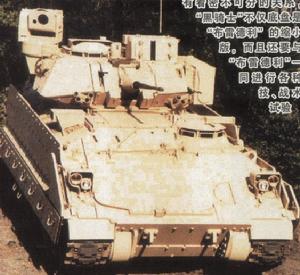
“黑騎士”的外觀酷似一輛縮小的主戰坦克。它採用傳統布局,每側五個負重輪的底盤,方方正正的堡壘形炮塔頗有美式裝備的風格。炮塔正前裝備一門30毫米“大毒蛇”鏈式機關炮和一挺並列機槍,採用自動裝填和全電炮塔,發射過程中30毫米彈殼通過防盾前方的拋殼口拋出,很容易讓人聯想到電影中的機器戰警。今後“黑騎士”還可能採用“布雷德利”先進技術演示車上的通用飛彈發射系統。
由於無須載人,“黑騎士”無人車並沒有傳統意義上的內部艙室,只有為了維護及拆卸模組化設備而在車身的底盤、後部及上部預留的開口和艙室空間。其尺寸比M1主戰坦克、MZ步兵戰車以及M3騎兵偵察車等有人車輛大幅度縮小,全車長約4米,寬2米,高2.3米,設計靈巧、緊湊,只比“悍馬”系列高機動車略大。
“黑騎士”的標準重量為9.5噸,其裝甲表面附有連線點,必要時可根據作戰地域的威脅等級加掛模組化裝甲,按最高威脅等級加掛全部裝甲後總重12噸。之所以將“黑騎士”的淨重限制在10噸以下,是為了滿足美國陸軍全球快速部署的需求,因為載重約20噸的C-130戰術運輸機一次可空運兩套“黑騎士”戰鬥系統。
 “黑騎士”無人裝甲概念車
“黑騎士”無人裝甲概念車“黑騎士”的雙銷履帶具備全地形通過能力,加裝機動增強附屬檔案後更可進行遠距離機動。由於“黑騎士”的履帶嵌上了橡膠塊,所以在行進時除了柴油發動機的轟鳴外,機械噪聲不大。
為了節省成本、縮短研發周期並降低風險,“黑騎士”大量採用現有技術和設計。這些技術和設計一是直接取材於現役裝備,二是使用英國宇航公司的“布雷德利”先進技術演示車上的成果。而英國宇航公司這樣做也的確能一舉兩得,既降低了成本、驗證“布雷德利”先進技術演示車上的成熟性,又能將為“黑騎士”專門開發的部件和設備,用於現役的裝甲戰鬥車輛。比如,它的炮塔直接取材於“布雷德利”步兵戰車,多種類型感測器、雙銷履帶、車載智慧型診斷系統、無線高速通信接口以及陶瓷複合裝甲等先進技術取自“布雷德利”行進技術演示車。
在任務特性方面,“黑騎士”的偵察型只有一門30毫米機關炮,但航宇公司已經在同一底盤上設計了突擊型“黑騎士”,後者能改用更大的火炮和重型超視距飛彈以及模組化的遙控自衛武器站,成為無人坦克殲擊車,或加裝先進大口徑迫擊炮模組作為巷戰的火力支援車,加裝布、掃雷模組成為無人布、掃雷車,加裝偵察、通信模組後成為無人通信中繼、指揮車,加裝先進防空系統後成為無人機動式防空平台。
特點技術
近觀“黑騎士”無人裝甲概念車,我們會發現其核心技術並不在於上述借用自M2步兵戰車的動力、防護和火力等部分,而在於其如何實現無人控制。實際上這一工作並不在BAE公司進行,而是由美國著名的卡耐基·梅隆大學國家機器人工程技術中心研製。這家老牌高校以計算機技術和人工智慧而著稱,看它都實現了哪些獨創的設計。
 “黑騎士”無人裝甲概念車
“黑騎士”無人裝甲概念車此外,炮塔頂部還有1具熱成像攝像機、2具彩色可見光攝像機,它們的圖像主要提供給後方的操作人員,用於對機器人的運動和作戰實況進行監視。車頂的天線和有人坦克相比,取消了車載短波天線,只剩下一套GPS天線和一套數據鏈天線。
自主導航 “黑騎士”設計了自動導航功能,以GPS、電子地圖技術為基礎,以車輛上安裝的各類感測器為耳目,通過信息融合技術和複雜的算法來實現。只要事先在地圖上為它順序設定若干個路標,“黑騎士”就能自主設計和篩選合理的機動路線,流暢地繞開各種固定的或移動的障礙物,到達指定的作戰陣地——像不像《紅色警戒》一類的實時戰略遊戲?
“黑騎士”初步試驗成功後於2006年底進行了智慧型自主巡邏的驗證。當遇到無法跨越的障礙時,“黑騎士”自主選擇臨時路線,繞過障礙物後,返回預定的巡邏路線。這一切,都是在無人干涉的狀態下自主完成的,顯示了它的人工智慧水平,已比以往無人作戰平台有了很大提高。
“黑騎士”的控制,則可以通過兩種方式進行。一種是通過安裝在“布雷德利”步兵戰車內的控制系統進行。這套設備由一個遊戲手柄、一組觸控螢幕組成,操作手可以通過螢幕監視若干輛作戰機器人的發動機工況、導航信息,以及車載攝像機獲得的現場實況。“黑騎士”系統還提供手持式控制器,像開玩具模型一樣進行控制。未來“黑騎士”還可以實現多輛無人車編隊自主巡航,按照這種趨勢,戰爭的形式將越來越像一場遊戲。
戰場預計
按美國陸軍的構想,在未來低強度作戰行動中,“黑騎士”的智慧型作戰能力將分兩個階段逐步完善以接近或達到實戰要求,這兩個階段也對應它的兩種作戰模式。
一是半自動作戰模式。這種模式是第一階段,在不遠的將來就可能實現的,即由1~2輛“布雷德利”戰車搭載數名無人作戰平台操作手,率領數輛“黑騎士”組成戰鬥編組。“布雷德利”戰車通過增強型高速戰術數據鏈與“黑騎士”組網,聯合進行偵察、監視並遙控“黑騎士”進入交戰。由於目前“布雷德利”戰車遙控“黑騎士”的極限距離只有3千米,如要遂行搜尋作戰任務,一輛“布雷德利”戰車最多只能組成寬約6千米的搜尋、攻擊幕。因此,在需要時,戰車上搭載的操作手必須下車,通過手持式控制器監控“黑騎士”的作戰行動。在搜尋前進時,“黑騎士”自動搜尋目標,人工智慧自動識別目標威脅性質和等級,並通過戰術數據鏈將監測到的信息傳回“布雷德利”的指揮艙或手持式控制器的顯示屏上,最終由操作人員決定打擊方式和程度。
二是全自動作戰模式。這種模式是“黑騎士”發展的第二階段,也就是在未來完善機器人人工智慧、遠程控制、先進混合驅動系統以及可靠性等基礎上實現的。根據構想,“黑騎士”將在指揮控制中心的遙控下,依據事先制定的行進線路、交戰規則和任務模式,自主地進行作戰巡邏。這一階段,戰爭機器人將擁有自主扣動扳機的權力,真正實現未來的機器人戰爭。
目前,關於“黑騎士”的種種構想只存在於人們的頭腦之中,但正如列寧所指出的那樣:“戰術是由軍事技術水平決定的。”決定作戰方法的因素是多方面的,其中武器裝備是生產水平、經濟條件和科學發展水平的集中體現,它直接決定作戰方法。但武器技術的發展都是由低到高,循序漸近的過程。歷史一次又一次的證明了機關槍、坦克、戰列艦、航空母艦在戰爭中戲劇性的地位。雖然目前以“黑騎士”為代表的無人作戰平台還很不成熟,但它卻很可能代表著未來地面戰爭的發展趨勢。隨著這些概念和技術的逐漸完善,必然會對已有的戰術、裝備產生重大的影響。
