
AGV概述
 AGV
AGVAGV一般以電池為動力,目前也有用非接觸能量傳輸系統--CPS(contactless Power System)為動力的。AGV裝有非接觸導航(導引)裝置,可實現無人駕駛的運輸作業。它的主要功能表現為能在計算機監控下,按路徑規劃和作業要求,精確地行走並停靠到指定地點,完成一系列作業功能。
AGV以輪式移動為特徵,較之步行、爬行或其它非輪式的移動機器人具有行動快捷、工作效率高、結構簡單、可控性強、安全性好等優勢。與物料輸送中常用的其他設備相比,AGV的活動區域無需鋪設軌道、支座架等固定裝置,不受場地、道路和空間的限制。因此,在自動化物流系統中,最能充分地體現其自動性和柔性,實現高效、經濟、靈活的無人化生產。
AGV優勢
1、安全性高
為確保AGV在運行過程中自身安全、現場人員及各類設備的安全,AGV採取多級硬體、軟體的安全措施。
保險扛:在AGV的外圍設有紅外光非接觸式防碰感測器和接觸式防碰感測器,AGV一旦在一定距離範圍內感應到障礙物即減速行駛,如障礙物位於更近的範圍內感應到障礙物即減速行駛,如障礙物位於更近的範圍內則停駛,直到障礙解除,AGV再自動恢復正常行駛。
信號燈:AGV安裝有醒目的信號燈和電子音樂播放器,以提醒周圍的操作人員避讓。
聲光報警:一旦發生故障,AGV將自動進行聲光報警,同時無線通訊通知AGV監控系統。
2、作業效率高。
傳統的叉車和拖車作業,需要有人駕駛。而叉車或拖車司機在工作期間需要吃飯喝水、休息,還可能發生怠工等影響作業效率的事件,另外叉車和拖車工作到一定時間還需要開到充電間進行充電,導致實際工作負荷不足70%,而AGV作為自動化物料搬運設備,可線上充電,24H滿負荷作業,具有人工作業無法比擬的優勢。
3、投入成本較低。
通過最近幾年的飛速發展,AGV的購置費已降低到與叉車比較接近的水平,而人工成本每年卻不斷上漲。兩相比較,少人化的收益日益明顯。
4、管理難度小。
叉車或拖車司機作為一線操作人員,通常勞動強度大、收入不高,員工的情緒波動較大,離職率也比較高,給企業管理帶來較大的難度。而AGV可有效規避管理上的風險,特別是近年來頻現的用工荒現象。
5、可靠性高。
相對於叉車及拖車行駛路徑和速度的未知性,AGV的導引路徑和速度卻是非常明確的,因此大大提高了物料搬運的準確性;同時,AGV還可做到對物料的跟蹤監控,可靠性得到極大提高。
6、降低產品損傷。
AGV可大大減少叉車工野蠻操作對產品本身及包裝的損傷風險。
7、較好的柔性和可拓展性。
AGV系統可允許最大限度地更改路徑規劃,具有較好的靈活性。同時,AGV系統已成為工藝流程中的一部分,可作為眾多工藝連線的紐帶,因此,具有較高的可擴展性。
AGV發展歷史
 複雜的AGV產品
複雜的AGV產品20世紀70年代,基本的導引技術是靠感應埋在地下的導線產生的電磁頻率。通過一個叫做“地面控制器”的設備打開或關閉導線中的頻率,從而指引AGV沿著預定的路逕行駛。
20世紀80年代末期,無線式導引技術引入到AGV系統中,例如利用雷射和慣性進行導引,這樣提高了AGV系統的靈活性和準確性,而且,當需要修改路徑時,也不必改動地面或中斷生產。這些導引方式的引入,使得導引方式更加多樣化了。
從20世紀80年代以來,自動導引運輸車(AGV)系統已經發展成為生產物流系統中最大的專業分支之一,並出現產業化發展的趨勢,成為現代化企業自動化裝備不可缺少的重要組成部分。在歐、美等發達國家,發展最為迅速,套用最為廣泛;在亞洲的日本和韓國,也得到迅猛的發展和套用,尤其是在日本,產品規格、品種、技術水平、裝備數量及自動化程度等方面較為豐富,已經達到標準化、系列化、流水線生產的程度。在我國,隨著物流系統的迅速發展,AGV的套用範圍也在不斷擴展,如何能夠開發出能夠滿足用戶各方面需求(功能、價格、質量)的AGV系統技術是未來我們必須面對的現實問題。
發展模式
 簡易的AGC產品
簡易的AGC產品第二種是以日本為代表的簡易型AGV技術--或只能稱其為AGC(Automated Guided Cart),該技術追求的是簡單實用,極力讓用戶在最短的時間內收回投資成本,這類AGV在日本和台灣企業套用十分廣泛,從數量上看,日本生產的大多數AGV屬於此類產品(AGC)。該類產品完全結合簡單的生產套用場合(單一的路徑,固定的流程),AGC只是用來進行搬運,並不刻意強調AGC的自動裝卸功能,在導引方面,多數隻採用簡易的磁帶導引方式。由於日本的基礎工業發達,AGC生產企業能夠為其配置上幾乎簡單得不能再簡單的功能器件,使AGC的成本幾乎降到了極限。這種AGC在日本80年代就得到了廣泛套用,2002到2003年達到套用的頂峰。由於該產品技術門檻較低,目前國內已有多家企業可生產此類產品。
國外發展
世界上第一台AGV是由美國Barrett電子公司於20世紀50年代初開發成功的,它是一種牽引式小車系統,可十分方便地與其他物流系統自動連線,顯著地提高勞動生產率,極大地提高了裝卸搬運的自動化程度。
1954年英國最早研製了電磁感應導向的AGV,由於它的顯著特點,迅速得到了套用和推廣。
1960年歐洲就安裝了各種形式、不同水平的AGVS220套,使用了AGV1300多台。到了70年代中期,由於微處理器及計算機技術的普及,伺服驅動技術的成熟促進了複雜控制器的改進,並設計出更為靈活的AGV。
1973年,瑞典VOLVO公司在KALMAR轎車廠的裝配線上大量採用了AGV進行計算機控制裝配作業,擴大了AGV的使用範圍。70年代末,歐洲約裝備了520個AGV系統,共有4800台小車,1985年發展到10000台左右。其套用領域分布為:汽車工業(57%),柔性製造系統FMS(8%)和柔性裝配系統FAS(44%).
20世紀80年代末,國外的AGV達到發展的成熟階段,此時美國的AGV生產廠商從1983年的23家劇增至1985年的74家。1984年,美國通用汽車公司完成了它的第一個柔性裝配系統(FAS),從此該公司就成為當時AGV的最大用戶。
1986年已達1407台(包括牽引式小車、叉車和單兀裝卸小車),1987年又新增加1662台。美國各公司在歐洲技術的基礎上將AGV發展到更為先進的水平,他們採用更先進的計算機控制系統,運輸量更大,移載時間更短,小車和控制器的可靠性更高。
日本在1963年首次引進AGV,其第一家AGV工廠於1966年由一家運輸設備供應廠商與美國的Webb公司合資建成。1976年後,日本對AGV的發展給予了高度重視,每年增加數十套AGV系統,有神鋼電機、平田電機、住友重機等27個主要生產廠商生產幾十種不同類型的AGV。
1981年,日本的AGV總產值為60億日元,1985年已上升到200億日元,平均每年以20%的速度遞增,1986年,日本累計安裝了2312個AGVS,擁有5032台AGV,到1990年日本擁有AGV約一萬台。
到1988年,日本AGV製造廠已達47家,如大福,Fanuc公司、Murata(村田)公司等,廣泛套用於汽車製造、機械、電子、鋼鐵、化工、醫藥、印刷、倉儲、運輸業和商業上。
中國發展
中國AGV發展歷程較短,但一直以來不斷加大在這一領域的投入,以改變我國AGV長期依賴進口的局面。經過不懈地努力終於取得了一定的成效,北京起重運輸機械研究所、清華大學、中國郵政科學院郵政科學研究規劃院、中國科學院瀋陽自動化所、大連組合工具機研究所、國防科技大學和華東工學院都在進行不同類型的AGV的研製並小批投入生產。
1976年,北京起重機械研究所研製出第一台AGV,建成第一套AGV滾珠加工演示系統,隨後又研製出單向運行載重500公斤的AGV,雙向運行載重500kg、1000kg、2000kg的AGV,開發研製了幾套較簡單的AGV套用系統。
1988年,原郵電部北京郵政科學技術研究所研製了郵政樞紐AGV。
1991年起,中科院瀋陽自動化研究所/新松機器人自動化股份研究公司為瀋陽金杯汽車廠研製生產了客車6台AGV用於汽車裝配線中,可以說是汽車工業中用得比較成功的例子,並於1996年獲國家科學技術進步三等獎。
1992年,天津理工學院研製了核電站用光學導引AGV。
1995年,我國的AGV技術出口韓國,標誌著我國自主研發的機器人技術第一次走向了國際市場。
在國內AGV的技術來源有兩種模式:一種是引進技術;一種是自有智慧財產權的技術。兩種模式目前都涵蓋AGV的所有技術,技術水平並無多大差別。引進技術主要是瑞典NDC的AGV控制系統技術,據了解NDC目前在國內現有3家合作夥伴。
AGV現狀
隨著物流系統的迅速發展,AGV的套用範圍也在不斷擴展,AGV系統,研究設計一種基於電磁導航的無人駕駛小車系統方案.通過實際硬體實驗,系統能夠達到預期設計要求,能夠廣泛運用於工業、軍事、交通運輸、電子等領域,具有良好的環境適應能力,很強的抗干擾能力和目標識別能力。
AGV系統
AGV系統的控制是通過物流上位調度系統、AGV地面控制系統及AGV車載控制系統三者之間的相互協作完成的,對該系統的理解,有一個非常恰當而通俗易懂的例子:假設某市有一家計程車公司,該公司管理先進,每輛計程車都裝全球定位系統(GPS),這樣在公司的監控中心就可以清楚地知道每輛車的位置及行駛路線,司機可通過無線通信隨時向公司匯報此時車輛的載客情況。
當有客戶需要乘坐計程車時,客戶可以打電話到計程車公司的客戶中心,說明他當前所在的位置,以及要到達的目的地,這裡,我們可將客戶的電話理解為來自物流調度系統的需求,計程車公司的客戶中心理解為AGV的地面控制系統,即AGV系統的上位。
客戶中心收到客戶的電話後,可以通過無線電話與計程車司機聯繫,選擇離客戶最近,又正好空閒的車輛A前往接客,就像AGV的地面控制系統進行的車輛和任務分配;在車輛A前往接客的途中,客戶中心可能又接到報告,有空閒車輛B離客戶更近,那么客戶中心將及時通知車輛B去接客戶,取消車輛A的任務,這就是AGV地面控制系統的動態車輛調度。客戶中心對計程車將要行駛道路的交通狀況也了如指掌,能夠及時通知各個司機選擇最便捷的道路行駛,該道路所需時間最短,但不一定是路程最短,因為,最近路程的道路上可能發生了交通阻塞,這就是AGV地面系統中所完成的路徑搜尋和路徑分配的工作。
AGV系統的控制過程就類似這樣一家管理先進的計程車公司,物流上位調度系統、AGV地面控制系統和AGV車載控制系統分別相當於客戶、客戶中心和計程車司機,AGV地面控制系統和各台AGV之間通過無線通信來交換信息,調度AGV的作業,並為其選擇路徑(線),確保交通通暢。AGV是以電池為動力的,當電量不足時,會向地面控制系統發出充電請求,在得到允許後,前往充電站自動充電,在充電期間,AGV地面控制系統不會向此AGV分配任何任務,就與計程車進了加油站不再載客一樣。
系統構成
 AGV系統的硬體結構
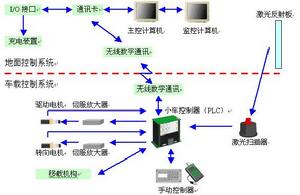
AGV系統的硬體結構曾有國外專家對AGV控制系統需解決的主要問題做了恰當的比喻:Where am I? (我在哪裡?)Where am I going?(我要去哪裡?) How can I get there?(我怎么去?),這三個問題歸納起來分別就是AGV控制系統中的三個主要技術:AGV的導航(Navigation),AGV的路徑規劃(Layout designing),AGV的導引控制(Guidance)。為了能夠解決好這些問題,AGV系統的構成也必然複雜:
AGV控制系統分為地面(上位)控制系統、車載(單機)控制系統及導航/導引系統,其中,地面控制系統指AGV系統的固定設備,主要負責任務分配,車輛調度,路徑(線)管理,交通管理,自動充電等功能;車載控制系統在收到上位系統的指令後,負責AGV的導航計算,導引實現,車輛行走,裝卸操作等功能;導航/導引系統為AGV單機提供系統絕對或相對位置及航向。
AGV系統是一套複雜的控制系統,加之不同項目對系統的要求不同,更增加了系統的複雜性,因此,系統在軟體配置上設計了一套支持AGV項目從路徑規劃、流程設計、系統仿真(Simulation)到項目實施全過程的解決方案。上位系統提供了可靈活定義AGV系統流程的工具,可根據用戶的實際需求來規劃或修改路徑或系統流程;而下位系統也提供了可供用戶定義不同AGV功能的程式語言。
地面控制
AGV地面控制系統(Stationary System)即AGV上位控制系統,是AGV系統的核心。其主要功能是對AGV系統(AGVS)中的多台AGV單機進行任務分配,車輛管理,交通管理,通訊管理等。
任務管理:任務管理類似計算機作業系統的進程管理,它提供對AGV地面控制程式的解釋執行環境;提供根據任務優先權和啟動時間的調度運行;提供對任務的各種操作如啟動、停止、取消等。
車輛管理:車輛管理是AGV管理的核心模組,它根據物料搬運任務的請求,分配調度AGV執行任務,根據AGV行走時間最短原則,計算AGV的最短行走路徑,並控制指揮AGV的行走過程,及時下達裝卸貨和充電命令。
交通管理:根據AGV的物理尺寸大小、運行狀態和路徑狀況,提供AGV互相自動避讓的措施,同時避免車輛互相等待的死鎖方法和出現死鎖的解除方法;AGV的交通管理主要有行走段分配和死鎖報告功能。
通訊管理:通信管理提供AGV地面控制系統與AGV單機、地面監控系統、地面IO設備、車輛仿真系統及上位計算機的通信功能。和AGV間的通信使用無線電通信方式,需要建立一個無線網路,AGV只和地面系統進行雙向通信,AGV間不進行通信,地面控制系統採用輪詢方式和多台AGV通信;與地面監控系統、車輛仿真系統、上位計算機的通信使用TCP/IP通信。
車輛驅動:小車驅動負責AGV狀態的採集,並向交通管理髮出行走段的允許請求,同時把確認段下發AGV。
安全系統:對於載重移動機器人與活動的人員及複雜工廠環境而言,智慧型AGV搬運機器人的安全性是其設計的重中之重。很多企業在選擇和要求AGV各種功能的時候往往忽略了AGV安全性,也有很多AGV製造廠商因為沒有掌握AGV安全技術核心沒有研發安全系統的團隊或無法進行深度安全避障研究,貿然使用一些本來就存在安全隱患的技術和避障模組,甚至有的廠商極不負責的使用一些廉價的淘汰技術和安全產品。
車載控制
AGV車載控制系統(Onboard System),即AGV單機控制系統,在收到上位系統的指令後,負責AGV單機的導航,導引,路徑選擇,車輛驅動,裝卸操作等功能。
導航(Navigation):AGV單機通過自身裝備的導航器件測量並計算出所在全局坐標中的位置和航向。
導引(Guidance):AGV單機根據目前的位置、航向及預先設定的理論軌跡來計算下個周期的速度值和轉向角度值即,AGV運動的命令值。
路徑選擇(Searching):AGV單機根據上位系統的指令,通過計算,預先選擇即將運行的路徑,並將結果報送上位控制系統,能否運行由上位系統根據其它AGV所在的位置統一調配。AGV單機行走的路徑是根據實際工作條件設計的,它有若干“段”(Segment)組成。每一“段”都指明了該段的起始點、終止點,以及AGV在該段的行駛速度和轉向等信息。
車輛驅動(Driving):AGV單機根據導引(Guidance)的計算結果和路徑選擇信息,通過伺服器件控制車輛運行。
導航導引
 AGV
AGV1、直接坐標(CartesianGuidance)
用定位塊將AGV的行駛區域分成若干坐標小區域,通過對小區域的計數實現導引,一般有光電式(將坐標小區域以兩種顏色劃分,通過光電器件計數)和電磁式(將坐標小區域以金屬塊或磁塊劃分,通過電磁感應器件計數)兩種形式,其優點是可以實現路徑的修改,導引的可靠性好,對環境無特別要求。缺點是地面測量安裝複雜,工作量大,導引精度和定位精度較低,且無法滿足複雜路徑的要求。
2、電磁導引(WireGuidance)
電磁導引是較為傳統的導引方式之一,目前仍被許多系統採用,它是在AGV的行駛路徑上埋設金屬線,並在金屬線載入導引頻率,通過對導引頻率的識別來實現AGV的導引。其主要優點是引線隱蔽,不易污染和破損,導引原理簡單而可靠,便於控制和通訊,對聲光無干擾,製造成本較低。缺點是路徑難以更改擴展,對複雜路徑的局限性大。
3、磁帶導引(MagneticTapeGuidance)
與電磁導引相近,用在路面上貼磁帶替代在地面下埋設金屬線,通過磁感應信號實現導引,其靈活性比較好,改變或擴充路徑較容易,磁帶鋪設簡單易行,但此導引方式易受環路周圍金屬物質的干擾,磁帶易受機械損傷,因此導引的可靠性受外界影響較大。
4、光學導引(OpticalGuidance)
在AGV的行駛路徑上塗漆或貼上色帶,通過對攝像機采入的色帶圖象信號進行簡單處理而實現導引,其靈活性比較好,地面路線設定簡單易行,但對色帶的污染和機械磨損十分敏感,對環境要求過高,導引可靠性較差,精度較低。
5、雷射導航(LaserNavigation)
雷射導引是在AGV行駛路徑的周圍安裝位置精確的雷射反射板,AGV通過雷射掃描器發射雷射束,同時採集由反射板反射的雷射束,來確定其當前的位置和航向,並通過連續的三角幾何運算來實現AGV的導引。
此項技術最大的優點是,AGV定位精確;地面無需其他定位設施;行駛路徑可靈活多變,能夠適合多種現場環境,它是目前國外許多AGV生產廠家優先採用的先進導引方式;缺點是製造成本高,對環境要求較相對苛刻(外界光線,地面要求,能見度要求等),不適合室外(尤其是易受雨、雪、霧的影響)。
 無反射板雷射導航AGV
無反射板雷射導航AGV6、慣性導航(InertialNavigation)
慣性導航是在AGV上安裝陀螺儀,在行駛區域的地面上安裝定位塊,AGV可通過對陀螺儀偏差信號(角速率)的計算及地面定位塊信號的採集來確定自身的位置和航向,從而實現導引。
此項技術在軍方較早運用,其主要優點是技術先進,較之有線導引,地面處理工作量小,路徑靈活性強。其缺點是製造成本較高,導引的精度和可靠性與陀螺儀的製造精度及其後續信號處理密切相關。
7、視覺導航(VisualNavigation)
8、GPS(全球定位系統)導航(GlobalPositionSystem)
通過衛星對非固定路面系統中的控制對象進行跟蹤和制導,目前此項技術還在發展和完善,通常用於室外遠距離的跟蹤和制導,其精度取決於衛星在空中的固定精度和數量,以及控制對象周圍環境等因素。
由此發展出來的是iGPS(室內GPS)和dGPS(用於室外的差分GPS),其精度要遠遠高於民用GPS,但地面設施的製造成本是一般用戶無法接受的。
結構設計
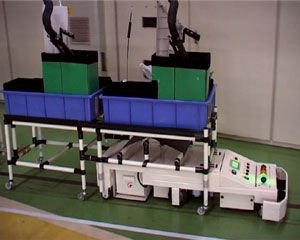
 AGV
AGV小車採用兩後輪獨立驅動差速轉向,兩前輪為萬向輪的四輪結構形式。步進電機經減速器後通過驅動輪提供驅動力,當兩輪運動速度不同時就可以實現差速轉向。
(1)車體
包括底盤、車架、殼體和控制室和相應的機械電氣結構如減速箱、電機、車輪等所組成,是AGV的基礎部分。具有電動車輛的結構特徵和無人駕駛自動作業的特殊要求。車架常用鋼構件焊接而成,重心越低越有利於抗傾翻。板上常安置移載裝置、電控系統、按鍵、顯示屏等。
(2)車架
車架是整個AGV小車的機體部分,主要用於安裝輪子、光感應器、伺服電機和減速器。車架上面安裝伺服電機驅動器、PCD板和電瓶。對於車架的設計,要有足夠的強度和硬度要求,故車架材料選用鑄造鋁合金,牌號為6061。其中6061質量比較輕,焊接性好。
(3)車輪
車輪採用實心橡膠輪胎。車體後面兩主動輪為固定式驅動輪,與輪轂式電機相連。前面兩個隨動輪為鏇轉式隨動輪,起支承和平衡小車的作用。
(4)載荷傳送裝置
AGV的載荷傳送裝置為一平板,其作用為運輸箱體類零件到指定工位。主要用來裝載箱體類零件,運送物料等.
(5)驅動裝置
AGV運行並具有速度控制和制動能力的子系統。主要包括電機、
減速器、驅動器、控制與驅動電路等。驅動系統一般為閉環方式與開環方式,前者以伺服直流電機為主,後者以步進電機為主。
(6)動力系統
蓄電池是目前AGV使用的唯一電源。用來驅動車體、車上附屬裝置,如控制、通訊、安全等。
AGV周邊設施使用一般工業電力,根據用途而有不同要求。如充電間頻率發生器、自動門、計算機室、通訊裝置以及工作環境所需裝置的動力等。根據車型、運行及載荷量而採用不同功率的蓄電他,一般都是蓄電池組合體。常用直流電壓為12伏、24伏、48伏及72伏。
充電方式
自動充電
 AGV
AGV手動充電
當AGV電力不足時,由地面控制中心指揮,駛向指定充電區或台位,由專職人員手動完成AGV與充電器之間的電器連線,然後實施充電,完成後也是人工去脫離連線電路,恢復工作狀態。手動充電AGV的特點是安全可靠,簡單易行,但需要專人看管,浪費人力,而且自動化程度降低。常用於自動化程度要求不是很高,車少人多,標準工作制的場合,如白天上班8小時使用AGV,下班休息時讓AGV充電,適用於酸性常規電池。換電池充電
當AGV電力不足時,由專職人員手動更換電池組,AGV即可投入使用。換下的電池組通過充電後待用。其特點是簡單快捷,但要專人看管,需多一倍的電池組,浪費人力財力,方式原始。常用於對工作回響的及時性要求較高、車不足的場合。技術參數
 AGV
AGV自動導引搬運車所能承載貨物的最大重量。AGV的載重量範圍在50kg~20000kg,以中小型噸位居多。根據日本通產省的調查,目前使用的AGV載重量在100kg以下的占19%,載重量在100kg~300kg22%300kg500kg9%500kg1000kg300kg占22%,300kg~500kg占9%,500kg~1000kg的占18%,18%1000kg~2000kg的占21%,2000kg~5000kg的占8%,而5000kg以上的數量極少。
2、自重
自重是指自動導引搬運車與電池加起來的總重量。
3、車體尺寸
車體尺寸是指車體的長、寬、高外形尺寸。該尺寸應該與所承載貨物的尺寸和通道寬度相適應。
4、停位精度
指AGV到達目的地址處並準備自動移載時所處的實際位置與程式設定的位置之間的偏差值(mm)。這一參數很重要,是確定移載方式的主要依據,不同的移載方式要求不同的停位精度。
5、最小轉彎半徑
指AGV在空載低速行駛、偏轉程度最大時,瞬時轉向中心到AGV縱向中心線的距離。它是確定車輛彎道運行所需空間的重要參數。
6、運行速度
指自動導引搬運車在額定載重量下行駛時所能達到的最大速度。它是確定車輛作業周期和搬運效率的重要參數。
7、工作周期
自動導引搬運車完成一次工作循環所需的時間。
8、運載類別
所運輸的物料的類型
9、移載方式
移載裝置的運動形式
10、驅動形式
指的是AGV靠什麼裝置來實現行走,轉向的功能的
行走機構
 AGV
AGV1、兩輪差速的行走機構這種行走機構兩行走驅動車輪對稱布置在前後中線上兩支承輪前後分別布置在以兩行走輪支點為底邊的等腰三角形頂點處。小車靠兩側行走驅動輪差速轉向因此不必設定舵輪。該小車機構簡單、工作可靠、成本低。在自動運行狀態下小車能做前進、後退行駛並能垂直轉彎機動性好。和帶舵輪的四輪行走機構小車相比該車由於省去了舵輪不僅可以省去兩台駕駛馬達還能節省空間小車可以做的更小些。近年來這種機構的小車得到廣泛套用。為了提高行駛時車體橫向穩定性可將兩輪差速的四輪行走機構做如下改進將支承輪由原來的兩個增加到四個分別布置在小車底盤的四個角處。
2、三輪行走機構三輪行走機構的AGV小車三個車輪分別布置在等腰三角形的三個頂點上前輪既是舵輪又是行走驅動輪後面兩個車輪是無動力支承輪。三輪行走機構的AGV小車結構簡單、控制容易、工作可靠、造價低。該車手動時可前進、後退和轉彎自動運行時只能單向行駛轉彎時後輪中點軌跡偏離導引線輪跡呈曳物線。
3、帶舵輪的四輪行走機構帶舵輪的四輪行走機構是在三輪行走機構基礎上演變過來的,它相當於把兩個三輪車合併在一起兩支承輪對稱地布置在小車前後的中線上前後車輪分別對稱布置在以兩支承輪支點為底邊的等腰三角形頂點處。前後車輪既是舵輪又是行走驅動輪。這種AGV小車在自動運行狀態下可全方位行駛轉彎時前後車輪均能跟蹤導引線軌跡機動性比三輪車好適用於狹窄通道作業環境。
4、其它形式的行走機構近年來國外公司不斷研究出新的行走機構。其中最有代表性的屬瑞典麥卡納姆公司的行走機構。該行走機構設計新穎、機構緊湊四個驅動車輪以鉸接形式分別布置在底盤的四個角上。運行時分別控制四個車輪的轉向和轉速利用速度矢量合成原理實現駕駛。後來日本三井公司與麥卡納姆公司合作在原基礎上做了改進推出了三井麥卡納姆車輪系統,其性能比原來又有所提高。這種AGV小車可實現全方位行駛。
套用領域
領域
1.倉儲業倉儲業是AGV最早套用的場所。1954年世界上首台AGV在美國的SouthCarolina州的MercuryMotorFreight公司的倉庫內投入運營,用於實現出入庫貨物的自動搬運。目前世界上約有2萬台各種各樣AGV運行在2100座大大小小倉庫中。海爾集團於2000年投產運行的開發區立體倉庫中,9台AGV組成了一個柔性的庫內自動搬運系統,成功地完成了每天23400的出入庫貨物和零部件的搬運任務。
2.製造業
AGV在製造業的生產線中大顯身手,高效、準確、靈活地完成物料的搬運任務。並且可由多台AGV組成柔性的物流搬運系統,搬運路線可以隨著生產工藝流程的調整而及時調整,使一條生產線上能夠製造出十幾種產品,大大提高了生產的柔性和企業的競爭力。1974年瑞典的VolvoKalmar轎車裝配廠為了提高運輸系統的靈活性,採用基於AGVS為載運工具的自動轎車裝配線,該裝配線由多台可裝載轎車車體的AGVS組成,採用該裝配線後,裝配時間減少了20%,裝配故障減小39%,投資回收時間減小57%,勞動力減小了5%。目前,AGV在世界的主要汽車廠,如通用、豐田、克萊斯勒、大眾等汽車廠的製造和裝配線上得到了普遍套用。
作為CIMS的基礎搬運工具,AGV的套用深入到機械加工、家電生產、微電子製造、捲菸等多個行業,生產加工領域成為AGV套用最廣泛的領域。
3.郵局、圖書館、港口碼頭和機場
在郵局、圖書館、碼頭和機場等場合,物品的運送存在著作業量變化大,動態性強,作業流程經常調整,以及搬運作業過程單一等特點,AGV的並行作業、自動化、智慧型化和柔性化的特性能夠很好的滿足上式場合的搬運要求。瑞典於1983年在大斯得哥爾摩郵局、日本於1988年在東京多摩郵局、中國在1990年於上海郵政樞紐開始使用AGV,完成郵品的搬運工作。在荷蘭鹿特丹港口,50輛稱為“yardtractors”的AGV完成貨櫃從船邊運送到幾百碼以外的倉庫這一重複性工作。
4.菸草、醫藥、食品、化工
對於搬運作業有清潔、安全、無排放污染等特殊要求的菸草、醫藥、食品、化工等行業中,AGV的套用也受到重視。在國內的許多捲菸企業,如青島頤中集團、玉溪紅塔集團、紅河捲菸廠、淮陰捲菸廠都套用了雷射引導式AGV完成托盤貨物的搬運工作。
5.危險場所和特種行業
在軍事上,以AGV的自動駕駛為基礎集成其他探測和拆卸設備,可用於戰場排雷和陣地偵察,英國軍方正在研製的MINDERRecce是一輛偵察車,具有地雷探測、銷毀及航路驗證能力的自動型偵察車。在鋼鐵廠,AGV用於爐料運送,減輕了工人的勞動強度。在核電站和利用核輻射進行保鮮儲存的場所,AGV用於物品的運送,避免了危險的輻射。在膠捲和膠片倉庫,AGV可以在黑暗的環境中,準確可靠的運送物料和半成品。行車AGV行車
對AGV行駛區域的環境進行圖象識別,實現智慧型行駛,這是一種具有巨大潛力的導引技術,此項技術已被少數國家的軍方採用,將其套用到AGV上還只停留在研究中,目前還未出現採用此類技術的實用型AGV。
可以想像,圖象識別技術與雷射導引技術相結合將會AGV更加完美,如導引的精確性和可靠性,行駛的安全性,智慧型化的記憶識別等都將更加完美。
術語
自動導引運輸車(AGV)AutomatedGuidedVehicle是指裝備有電磁或光學等自動導引裝置,由計算機控制、輪式移動為特徵、並且能夠沿規定的導引路徑自動行駛的運輸車輛。AGV可具有安全防護、移載(裝卸)等多種功能。
自動導引運輸車系統(AGVS)AGVSystem
具備自動導引運輸車特性的一整套系統,一般包括數量不等的AGV車輛,上位控制系統,導航系統,通訊系統和充電系統等。
車載控制系統Onboardcontrolsystem
用於AGV車輛的計算機控制軟體及其相關器件的總稱。
上位控制系統Hostcontrolsystem
用於AGV調度系統的計算機控制軟體及其相關器件的總稱。
無人駕駛Driverless
AGV的主要特性之一。
系統能力Systemcapacity
AGV系統在單位時間內能夠實現的最大的搬運能力。
系統可靠性Systemreliability
AGV系統正常工作時間所占工作總時間的百分比,由於多台AGV處在並行工作模式中,其中一台發生故障的時間權值為1/n,n為系統中AGV的總台數。
地面固定設備Stationaryequipment
在AGV系統中,用於上位控制,導航/導引,通訊,充電等設備的總稱。
反射板Reflector
在雷射導引AGV系統中使用的導航或導引標識物。
平面反射板Flatreflector
反射板的一種類型,反射面為平面
柱狀反射板Columnreflector
反射板的一種類型,反射面為柱面
定位標誌Positionmark
AGV在停車定位時使用的標識物。
磁帶Magnetictape
用於磁帶導引AGV系統的地面導引設施,一般是沿AGV的行駛路徑將其貼上於地板表面。
導引線Wire
用於電磁導引AGV系統的地面導引設施,一般是沿AGV的行駛路徑將其埋於地下。
反光帶Reflectivetape
用於光學導引AGV系統的地面導引標識,按導引感測器的特點,沿AGV的行駛路徑噴塗或貼上相應顏色的色帶。
感光帶Sensitivetape
用於光學導引AGV系統的地面導引標識,按導引感測器的特點,沿AGV的行駛路徑貼上或噴塗相應的化學感光材料。
磁釘Magnet
定位標識的一種,用磁性材料做成。
頻率發生器Frequencygenerator
用於電磁導引AGV系統的地面導引設施,能夠將特定的頻率載入至導引線上。
無線接入點Wirelessaccesspoint
以無線區域網路方式進行通訊的固定通訊設備。
無線數據機Radiomodem
以射頻(RF)方式進行通訊的通訊設備。
無線區域網路WirelessLAN
用於AGV車輛和上位控制系統通訊的網路。
充電站ChargingStation
用於AGV車輛充電的設備及地點的總稱。
充電連線器Chargingconnector
用於AGV車輛充電連線的器件(包括地面和車載)。
物流調度系統伺服器Logisticsystemserver
用於運行物流調度系統的計算機。
AGV調度系統伺服器AGVdispatchsystemserver
用於運行AGV調度系統的計算機。
資料庫伺服器Databasesever
為AGV調度系統存儲數據。
關聯設備Correlativeequipment
與AGV系統相關的外部設備,一般是指與AGV協作完成裝卸貨操作的設備。
物流調度系統Logisticsystem
AGV系統的上位控制系統,AGV系統的任務可由此系統產生。
AGV調度系統AGVdispatchingsystem
調度任務執行、車輛分配、路徑分配及交通管制的控制軟體。
熱啟動Warmstart
AGV調度系統在上一次退停止時保存的運行狀態數據的基礎上啟動執行。
冷啟動Coldstart
AGV調度系統啟動執行,重新進行系統初始化。
系統控制接口SystemControlInterface
AGV系統向外界提供的控制接口,使得它能夠被集成到更大的系統中。
圖形監控Graphicalmonitor
以圖形化的方式提供對整個AGV系統運行情況的查詢和人工干預。
通信協定Communicationprotocol
AGV調度系統和AGV車輛通信使用的通信協定。
通信丟失Lostcommunication
AGV調度系統和AGV車輛出現通信中斷,調度系統無法得到AGV車輛狀態。
通信頻道Communicationchannel
通信設備使用的頻道。
主機地址HostIPaddress
運行AGV調度系統的伺服器使用的IP位址。
主機連線埠Hostport
運行AGV調度系統的伺服器監聽連線埠。
自動充電Autocharging
AGV車輛在AGV調度系統的控制下進行充電。
手動充電Manualcharging
AGV車輛在操作人員的控制下進行充電,包括人工指令和手動更換電池兩種方式。
柔性Flexibility
AGV系統能夠應對各種各樣的流程變化或擴展。
日誌Log
用於存儲系統運行時發生的重要事件、錯誤等信息。
工作流程Work-flow
AGV調度系統執行任務時採用的工藝流程。
簡單流程Simplework-flow
在AGV的一個搬運任務中,只有一次裝貨,一次卸貨。
複雜流程Complexwork-flow
在AGV的一個搬運任務中,有多次裝貨或卸貨。
任務Order
需要AGV調度系統處理的工作。
任務屬性Orderproperty
任務具有的一些特徵性質。
搬運起點Pickuppoint
AGV裝貨的地點。
搬運終點Deliverypoint
AGV卸貨的地點。
任務調度Orderschedule
AGV調度系統為正在執行的多個任務分配執行時間等資源。
任務優先權Orderpriority
任務執行時間和車輛分配的優先權。
任務流程Orderwork-flow
任務執行時使用的工作流程。
任務取消Ordercancel
AGV調度系統取消正在執行中的任務,結束任務的執行。
任務變更Orderalter
AGV調度系統變更正在執行中的任務的搬運起點、搬運終點。
最大任務調度量Maximumnumberofschedulingorder
AGV調度系統能夠調度任務的最大數量。
任務周期Orderlifetime
任務從生成到結束的時間。
任務回響時間Orderresponsetime
任務從生成到AGV開始執行任務的時間。
任務執行時間Orderexecutetime
任務從開始執行到任務結束的時間。
任務統計Orderstatistics
對AGV調度系統中產生的任務數據進行收集、分析、解釋和表述。
計畫任務Schemedorder
AGV調度系統根據計畫自動在特定時間啟動的任務。
物流調度系統任務Hostorder
AGV調度系統根據物流調度系統的命令啟動的任務。
人工任務Manualorder
AGV調度系統根據操作人員的命令啟動的任務。
觸發任務Triggedorder
由某個外部條件觸發AGV調度系統啟動的任務。
任務查詢Orderquery
向AGV調度系統詢問任務的執行情況。
任務執行紀錄Orderexecuterecord
AGV調度系統紀錄的任務執行狀態和結果。
優先模式Prioritymode
AGV調度系統優先執行任務的模式。
複合任務Combineorder
AGV調度系統通過對任務的最佳化,可將多個任務結合在一起成為一個複合任務。
充電任務ChargeOrder
AGV調度系統指揮AGV車輛進行充電的任務。
AGV運行模式AGVrunningmode
AGV運行時的一些標準模式,如:手動,自動,半自動
AGV調度AGVschedule
AGV調度系統根據系統當前的情況安排AGV執行任務和行駛。
AGV分配AGVassignment
以一定的最佳化原則將AGV調度系統中的任務分配給各台AGV。
正常工作率AGVhealthrate
AGV無故障工作的時間除以AGV開機時間。
使用率AGVworkingrate
AGV執行任務的時間除以AGV正常工作時間。
空跑率AGVuselessrunningrate
AGV為執行任務而空跑的時間除以AGV正常工作時間。
空閒率AGVfreetimerate
AGV沒有搬運任務,處於停止的時間除以正常工作時間。
路徑搜尋Routesearch
AGV調度系統在規劃地圖中搜尋從搬運起點到搬運終點的路徑。
最短路徑Theshortestroute
規劃地圖中從搬運起點到搬運終點的最短路徑。
路徑規劃Layout
根據實際的AGV套用環境,為AGV設計規划行駛的路線。
點Point
用於AGV車輛正常停車的地點。
節點Node
指路徑規劃地圖上的分流點及合流點。
待命點Waitpoint
空閒AGV等待命令的點。
自動插入點Autoinsertpoint
AGV進行自動插入的點,從而確定自身的位置。
避讓點Evadingpoint
AGV車輛之間進行相互避讓的點。
通信點Communicationpoint
AGV和AGV調度系統之間進行通信的點。
段Segment
AGV車輛嚴格遵照行駛的點和點之間的軌跡路線。
直線段Linearsegment
幾何形狀是直線的段。
曲線段Curvingsegment
幾何形狀是曲線的段。
站台Station
用於AGV車輛執行操作(如裝卸,充電等)的設備和地點。
裝貨站台Pickupstation
用於輔助AGV車輛進行裝貨的設備或地點。
卸貨站台Deliverystation
用於輔助AGV車輛進行卸貨的設備或地點。
複合站台Combinedstation
AGV車輛既能夠進行裝貨又卸貨的站台。
交通管制Trafficcontrol
AGV調度系統對多台AGV車輛運行時的交通進行實時的管理和控制。
交通阻塞Trafficblock
行駛路線被別的AGV車輛或物體占用,導致AGV停車等待,稱為交通阻塞。
死鎖Deadlock
AGV車輛向AGV調度系統請求不可能得到的路徑資源。
合流Confluence
在路徑規劃地圖上,多條路徑匯合成為一條路徑。
分流Diffluence
在路徑規劃地圖上,一條路徑分開成為多條路徑。
導引模式Guidancemode
AGV車輛採用的導航方式或導引算法
導航Navigation
確定AGV車輛在全局坐標系中的位置及航向
導引Guidance
按路徑所提供的目標值計算出實際控制命令值,即給出AGV車輛的設定速度和轉向角。
電磁導引(Inductive)WireGuidance
以電磁感測器獲取導引信息,以定位感測器獲取相對位置的導引模式。
磁帶導引Magnetictapeguidance
以磁帶感測器獲取導引信息,以定位感測器獲取相對位置的導引模式。
光學導引Opticalguidance
以光學感測器獲取導引信息,以定位感測器獲取相對位置的導引模式。
坐標導引Cartesianguidance
以光學、電磁感測器等感測器獲取地面柵格信息,通過運算得到絕對位置信息的導引模式。
雷射導航Lasernavigation
以雷射掃描器獲取反射板信息,通過三角幾何運算得到絕對位置信息的導引模式。
慣性導航Inertialnavigation
以慣性器件(陀螺Gyroscope)檢測AGV的角速度,輔助以地面定位標識,從而獲取絕對位置信息的導引模式。
視覺導航Visualnavigation
以視覺感測器獲取運行區域的地理信息,通過運算得到絕對位置信息的導引模式。
全球定位系統(GPS)Globalpositionsystem
通過衛星獲取絕對位置信息的導引模式。
室內GPS(iGPS)IndoorGPS
通過接受室內安裝航標塔發射的信號獲取絕對位置信息的導引模式。
差分GPS(dGPS)DifferentialGPS
通過安裝航標塔來修正衛星信號,而獲取絕對位置信息的導引模式。
參考點Referencepoint
運動學計算中,用於代表AGV車輛的某一點。
位置Position
AGV車輛在全局坐標系中的坐標,既絕對位置,包括X坐標、Y坐標。
航向角Orientation
AGV車輛全局坐標系中車頭方向與X軸的夾角。
導引裝置Guidanceequipment
用於獲取AGV車輛導航、導引信息的裝置。
雷射掃描器Laserscanner
用於雷射導引AGV車輛獲取導航、導引信息的器件。
定位感測器Positionsensor
用於AGV車輛進行位置修正或輔助定位的檢測器件。
驅動模式Drivingmode
AGV車輛根據不同的運動學及動力學算法,可採用不同的驅動方法及驅動輪系布置方式。
驅動單元Drivingassembly
用於AGV車輛驅動及轉向的機構總稱。
驅動電機Drivingmotor
用於AGV車輛驅動的電機。
轉向電機Steeringmotor
用於AGV車輛轉向的電機。
單輪驅動兼轉向(SD)Steeringdriving
只使用同一個驅動單元,其中同時包括驅動轉向功能。
差速驅動(DIFF)Differentialdriving
使用兩個不含轉向的驅動單元,利用不同驅動單元速度的變化來完成驅動和轉向功能。
全方位驅動(QUAD)Quadmotion
使用兩個或兩個以上含有驅動及轉向的驅動單元,使AGV車輛能夠完成任意方向的平面運動。
單輪驅動Sole-wheeldriving
只有一套驅動單元的驅動方式。
雙輪驅動Dual-wheeldriving
有兩套驅動單元的驅動方式。
多輪驅動Multi-wheeldriving
有兩套以上驅動單元的驅動方式。
車輪承載能力Wheelloadcapacity
車輪能夠承受的額定重量。
前進Forward
AGV車輛沿車頭方向向前運動。
後退Backward
AGV車輛沿車頭方向向後運動
側移Crabwise
AGV車輛保持航向不變,向兩側平行運動。
轉彎Turnning
是指改變AGV車輛的航向角。
自鏇Rotating
AGV車輛參考點處的轉彎半徑為0;通常是指差速或全方位驅動型AGV。
制動器Braker
驅動電機或移載機構電機的剎車裝置。
研究方法
AGV路線最佳化和實時調度是當前AGV領域的一個研究熱點。實用中,人們採用的方法主要有:
1.數學規劃方法
為AGV選擇最佳的任務及最佳路徑,可以歸納為一個任務調度問題。數學規劃方法是求解調度問題最優解的傳統方法,該方法的求解過程實際上是一個資源限制下的尋優過程。實用中的方法主要有整數規劃、動態規劃、petri方法等。在小規模調度情況下,這類方法可以得到較好的結果,但是隨著調度規模的增加,求解問題耗費的時間呈指數增長,限制了該方法在負責、大規模實時路線最佳化和調度中套用。
2.仿真方法
仿真方法通過對實際的調度環境建模,從而對AGV的一種調度方案的實施進行計算機的模擬仿真。用戶和研究人員可以使用仿真手段對某些調度方案進行測試、比較、監控,從而改變和挑選調度策略。實用中採用的方法有離散事件仿真方法、面向對象的仿真方法和3維仿真技術,有許多軟體可以用於AGV的調度仿真,其中,Lanner集團的Witness軟體可以快速建立仿真模型,實現仿真過程三維演示和結果的分析處理。
3.人工智慧方法
人工智慧方法把AGV的調度過程描述成一個在滿足約束的解集搜尋最優解的過程。它利用知識表示技術將人的知識包括進去,同時使用各種搜尋技術力求給出一個令人滿意的解。具體的方法有專家系統方法、遺傳算法、啟發式算法、神經網路算法。其中,專家系統方法在實用中較多採用,它將調度專家的經驗抽象成系統可以理解和執行的調度規則,並且採用衝突消解技術來解決大規模AGV調度中的規則膨脹和衝突問題。
由於神經網路具有並行運算、知識分布存儲、自適應性強等優點,因此,它成為求解大規模AGV調度問題是一個很有希望的方法。目前,用神經網路方法成功的求解了TSP-NP問題,求解中,神經網路能把組合最佳化問題的解轉換成一種離散動力學系統的能量函式,通過使能量函式達到最小而求得最佳化問題的解。
遺傳算法是模擬自然界生物進化過程中的遺傳和變異而形成的一種最佳化求解方法。遺傳算法在求解AGV的最佳化調度問題時,首先通過編碼將一定數量的可能調度方案表示成適當的染色體,並計算每個染色體的適應度(如運行路徑最短),通過重複進行複製、交叉、變異尋找適應度大的染色體,即AGV調度問題的最優解。
單獨用一種方法來求解調度問題,往往存在一定的缺陷。目前,將多種方法進行融合來求解AGV的調度問題是一個研究熱點。如,將專家系統和遺傳算法融合,把專家的知識融入到初始染色體群的形成中,以加快求解速度和質量。
總結說明
首先,給大家兩個英文單詞Navigation(導航),Guidance(導引),這兩個單詞的意思是不一樣的。導航是指確定自身的位置及航向;而導引是根據目前的位置、航向及理論軌跡來計算下個周期的速度值和轉向角度值。有了這個概念後,我們分析一下磁帶導引、電磁導引或其它形式的“有線”導引。他們都只能稱為導引,而不叫導航。因為,這些導引方式只需AGV的相對位置,而與全局坐標無關!這也是為什麼這類導引的AGV相對簡單的原因:不需要複雜的導航計算(Dead-reckoning),甚至不需要導引計算,只需根據感測器的差分信號進行簡單的轉向控制。建議朋友們,不再說磁導航,而是叫磁帶導引(Magnetic Tape Guidance)和電磁導引也稱線導(Wire Guidance)。
AGV的導航/導引技術多種多樣,不同的場合可採用不同的導引技術。單一的導引技術無法覆蓋所有的套用:例如在有叉車行駛的場合我們就不宜選用磁帶導引,可選用將導引線埋入地下的電磁導引;在由於工藝需要,路徑需要經常變化的場合,可考慮雷射導引;在路徑複雜的場合應儘量考慮“無線”方式(雷射,陀螺),因為“有線”模式,只能是真正地理意義上的“路”,而“無線”模式的路徑是虛擬的,可以重疊,交叉,可以亂得象一團麻,而即使這樣,AGV的運行在系統的調度下也是有序的,路徑的選擇也是最優的,所謂“條條大路通羅馬”。AGV就能象汽車一樣,在受到前方車輛阻擋時還能夠找到其它的路徑,從而提升AGV系統的作業效率。
工作原理
AGV變頻器主電路是給異步電動機提供調壓調頻電源的電力變換部分,agv變頻器的主電路大體上可分為兩類[1]:電壓型是將電壓源的直流變換為交流的agv變頻器,直流迴路的濾波是電容。電流型是將電流源的直流變換為交流的變頻器,其直流迴路濾波是電感。它由三部分構成,將工頻電源變換為直流功率的“整流器”,吸收在變流器和逆變器產生的電壓脈動的“平波迴路”,以及將直流功率變換為交流功率的“逆變器”。
(1)整流器:最近大量使用的是二極體的變流器,它把工頻電源變換為直流電源。也可用兩組電晶體變流器構成可逆變流器,由於其功率方向可逆,可以進行再生運轉。
(2)平波迴路:在整流器整流後的直流電壓中,含有電源6倍頻率的脈動電壓,此外逆變器產生的脈動電流也使直流電壓變動。為了抑制電壓波動,採用電感和電容吸收脈動電壓(電流)。裝置容量小時,如果電源和主電路構成器件有餘量,可以省去電感採用簡單的平波迴路。
(3)逆變器:同整流器相反,逆變器是將直流功率變換為所要求頻率的交流功率,以所確定的時間使6個開關器件導通、關斷就可以得到3相交流輸出。以電壓型pwm逆變器為例示出開關時間和電壓波形。
agv控制電路是給異步電動機供電(電壓、頻率可調)的主電路提供控制信號的迴路,它有頻率、電壓的“運算電路”,主電路的“電壓、電流檢測電路”,電動機的“速度檢測電路”,將運算電路的控制信號進行放大的“驅動電路”,以及逆變器和電動機的“保護電路”組成。
(1)運算電路:將外部的速度、轉矩等指令同檢測電路的電流、電壓信號進行比較運算,決定逆變器的輸出電壓、頻率。
(2)電壓、電流檢測電路:與主迴路電位隔離檢測電壓、電流等。
(3)驅動電路:驅動主電路器件的電路。它與控制電路隔離使主電路器件導通、關斷。
(4)速度檢測電路:以裝在異步電動機軸機上的速度檢測器(tg、plg等)的信號為速度信號,送入運算迴路,根據指令和運算可使電動機按指令速度運轉。
(5)保護電路:檢測主電路的電壓、電流等,當發生過載或過電壓等異常時,為了防止逆變器和異步電動機損壞,使逆變器停止工作或抑制電壓、電流值。
主控晶片
在選擇主控晶片的過程中,存在以下兩種方案,而且均可行:
第一種方案是以凌陽61為主要的邏輯控制晶片,並輔以DSP5502,主要是以DSP數字處理的高速性來配合感測器進行高效的數據採集。但是問題是DSP通用的輸入輸出口比較缺乏(僅有2個),需要額外的添加FPGA或CPLD進行輸入輸出口的擴展。而且紅外光電開關的反應速度一般比較低(一般大於0.5毫秒),採樣頻率只要大於2KHz就能滿足實際的要求。
第二種方案是主要以凌陽61單片機直接實現。因為該單片機內分別置有8路和2路的ADC和DAC,這樣就減少了外接數模和模數轉換晶片。而且它具有豐富的輸入輸出連線埠更易於擴展,而且凌陽61的開發板具有現成的語音模組,通過相應的語音採集與播報程式即可使其運行。並且集成的開發環境中擁有很多的語音函式,因此實現語音播放功能比較簡單,再加單片機可以實現它的線上調試,不僅提高了開發的效率,而且提高了調試的效率。
經過反覆綜合的考慮,以及為了滿足現實的要求,不僅降低成本而且降低難度的要求,最終選擇第二種方案。
