剛體的定點運動 剛體的定點運動所屬現代詞,指的是剛體上某一點始終保持不動的一種運動。
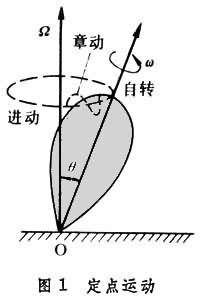
剛體的定點運動 正文 剛體上某一點始終保持不動的一種運動。如陀螺 繞定點O的運動(圖1)。
剛體的定點運動 剛體的定點運動
剛體上點的速度和加速度設任一瞬時剛體的角速度矢量為ω,角加速度矢量為α ,如取定點O為矢徑原點時,則剛體上任一點P的速度矢量r p是P點對於O的矢徑。加速度矢量
剛體的定點運動 歐拉運動 學方程 剛體作定點運動的角速度矢量
式中夗 、夝 、夗分別為進動角嗞,章動角θ, 自轉角嗞對時間t的一階導數,它們分別稱為進動角速度,章動角速度,自轉角速度;k 、n 、k ┡分別是Oζ軸,節線
此三個方程稱為歐拉運動學方程。 歐拉動力學方程 如取過定點O 的剛體的三個互相垂直的慣量主軸 (見慣量張量 )為坐標系Oxyz的坐標軸,並設剛體對這三個坐標軸的主轉動慣量 分別為A、B、C。外力系對O點的主矩矢量在這三個軸上的投影分別為M x、My、Mz,則定點運動的剛體的運動微分方程為
這就是L.歐拉 於1758年得出的剛體定點運動的微分方程,稱為歐拉動力學方程。歐拉動力學方程和歐拉運動學方程聯立,在已知外力矩Mx、My、Mz和初始條件(三個歐拉角的初值和它們的初始導數值)下,可積分求得剛體定點運動的運動方程,就知道了三個歐拉角隨時間變化的規律。在任意外力系的作用和任意形狀剛體的情況下,這一組方程至今沒有得到用求積形式表示的精確解。困難主要來自方程的非線性。但因剛體定點運動的理論分析在陀螺技術中具有重要作用,所以這個問題的解決仍然是剛體動力學的重大研究課題之一。這一組方程,目前只在下述三種特殊情況下得到了精確解:
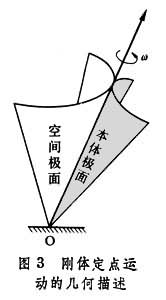
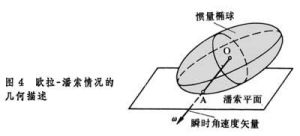
1851年L.潘索給這個情況下所得的解作了著名的幾何解釋:剛體運動可看成剛體關於O點的慣量橢球 在一固定平面上的無滑動的滾動,此固定平面稱為潘索平面(圖4)。
剛體的定點運動 J.L.拉格朗日 於1788年給出了另一種特殊情況下的解,S.-D.泊松於1813年對此情況又作了進一步研究。他們所研究的情況是:剛體只受重力W 作用,重心在Oz軸上,剛體關於O點的慣量橢球 是鏇轉橢球,即A=B的情況。如重心離O點的距離為d,則在此情況下歐拉動力學方程簡化為
③ 柯瓦列夫斯卡婭 情況。1888年俄國科學家С.Β.柯瓦列夫斯卡婭利用複變函數論的觀點給出了第三種情況下的解。在此情況下:剛體只受重力W 作用,重心在剛體關於O點的慣量橢球的赤道平面內,離O點的距離為d,且A=B=2C。此時歐拉動力學方程為
這裡動坐標系的x 軸通過重心。 配圖 相關連線
 剛體的定點運動
剛體的定點運動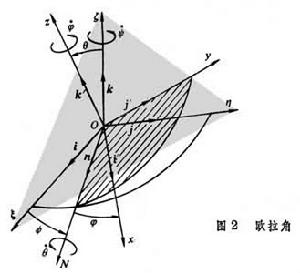 剛體的定點運動
剛體的定點運動 稱為節線。
稱為節線。 。
。 ,式中rp是P點對於O的矢徑。加速度矢量
,式中rp是P點對於O的矢徑。加速度矢量 。
。  剛體的定點運動
剛體的定點運動 ,
,


 剛體的定點運動
剛體的定點運動