![陀螺儀[角運動檢測裝置]](/img/2/c2e/nBnauM3X3gTM0ATOzkTOxMDN0UTMyITNykTO0EDMwAjMwUzL5kzL0gzLt92YucmbvRWdo5Cd0FmLyE2LvoDc0RHa.jpg "陀螺儀[角運動檢測裝置]")
裝置介紹
繞一個支點高速轉動的剛體稱為陀螺(top)。通常所說的陀螺是特指對稱陀螺,它是一個質量均勻分布的、具有軸對稱形狀的剛體,其幾何對稱軸就是它的自轉軸。 與蒼蠅退化的後翅(平衡棒)原理類似。
 陀螺儀原理圖
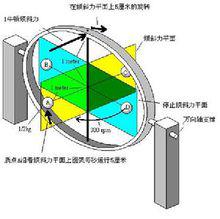
陀螺儀原理圖在一定的初始條件和一定的外在力矩作用下,陀螺會在不停自轉的同時,環繞著另一個固定的轉軸不停地鏇轉,這就是 陀螺的鏇進(precession),又稱為 迴轉效應(gyroscopic effect)。陀螺鏇進是日常生活中常見的現象,許多人小時候都玩過的陀螺就是一例。
人們利用陀螺的力學性質所製成的各種功能的陀螺裝置稱為 陀螺儀(gyroscope),它在科學、技術、軍事等各個領域有著廣泛的套用。比如:迴轉羅盤、定向指示儀、炮彈的翻轉、陀螺的章動等。
陀螺儀的種類很多,按用途來分,它可以分為感測陀螺儀和指示陀螺儀。感測陀螺儀用於飛行體運動的自動控制系統中,作為水平、垂直、俯仰、航向和角速度感測器。指示陀螺儀主要用於飛行狀態的指示,作為駕駛和領航儀表使用。
陀螺儀分為,壓電陀螺儀,微機械陀螺儀,光纖陀螺儀和雷射陀螺儀,它們都是電子式的,並且它們可以和加速度計,磁阻晶片,GPS,做成慣性導航控制系統。
結構
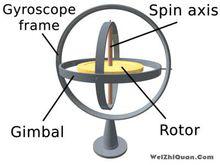
基本上陀螺儀是一種機械裝置,其主要部分是一個對鏇轉軸以極高角速度鏇轉的轉子,轉子裝在一支架內;在通過轉子中心軸XX1上加一內環架,那么陀螺儀就可環繞平面兩軸作自由運動;然後,在內環架外加上一外環架;這個陀螺儀有兩個平衡環,可以環繞平面 三軸作自由運動,就是一個完整的太空陀螺儀(space gyro)。
歷史
 陀螺儀結構
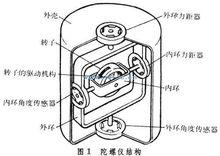
陀螺儀結構1850年法國的物理學家萊昂·傅科(J.Foucault)為了研究地球自轉,首先發現高速轉動中地的轉子(rotor),由於它具有慣性,它的鏇轉軸永遠指向一固定方向,他用希臘字 gyro(鏇轉)和skopein(看)兩字合為gyro scopei 一字來命名這種儀表。
陀螺儀是一種既古老而又很有生命力的儀器,從第一台真正實用的陀螺儀器問世以來已有大半個世紀,但直到現在,陀螺儀仍在吸引著人們對它進行研究,這是由於它本身具有的特性所決定的。陀螺儀最主要的基本特性是它的穩定性和進動性。人們從兒童玩的地陀螺中早就發現高速鏇轉的陀螺可以豎直不倒而保持與地面垂直,這就反映了陀螺的穩定性。研究陀螺儀運動特性的理論是繞定點運動剛體動力學的一個分支,它以物體的慣性為基礎,研究鏇轉物體的動力學特性。
均衡陀
![陀螺儀[角運動檢測裝置]](/img/9/73a/wZwpmLxgjNxATNwYzN4EDN0UTMyITNykTO0EDMwAjMwUzL2czLyEzLt92YucmbvRWdo5Cd0FmL0E2LvoDc0RHa.jpg) 陀螺儀[角運動檢測裝置]
陀螺儀[角運動檢測裝置]![陀螺儀[角運動檢測裝置]](/img/c/138/wZwpmL2gjN4kjM2YzN1IDN0UTMyITNykTO0EDMwAjMwUzL2czL3AzLt92YucmbvRWdo5Cd0FmLyE2LvoDc0RHa.jpg) 陀螺儀[角運動檢測裝置]
陀螺儀[角運動檢測裝置]![陀螺儀[角運動檢測裝置]](/img/a/76e/wZwpmLzgjMzYTN0ITMxIDN0UTMyITNykTO0EDMwAjMwUzLyEzL4QzLt92YucmbvRWdo5Cd0FmL0E2LvoDc0RHa.jpg) 陀螺儀[角運動檢測裝置]
陀螺儀[角運動檢測裝置]![陀螺儀[角運動檢測裝置]](/img/8/ab0/wZwpmL3YDM0UTO3EDM1ATN0UTMyITNykTO0EDMwAjMwUzLxAzLzUzLt92YucmbvRWdo5Cd0FmL0E2LvoDc0RHa.jpg) 陀螺儀[角運動檢測裝置]
陀螺儀[角運動檢測裝置]![陀螺儀[角運動檢測裝置]](/img/0/81b/wZwpmL3MzM3IDN3cjM1ATN0UTMyITNykTO0EDMwAjMwUzL3IzLzQzLt92YucmbvRWdo5Cd0FmLwE2LvoDc0RHa.jpg) 陀螺儀[角運動檢測裝置]
陀螺儀[角運動檢測裝置]![陀螺儀[角運動檢測裝置]](/img/3/30b/wZwpmL1AzM2AjN4YjNwMDN0UTMyITNykTO0EDMwAjMwUzL2YzLwAzLt92YucmbvRWdo5Cd0FmLyE2LvoDc0RHa.jpg) 陀螺儀[角運動檢測裝置]
陀螺儀[角運動檢測裝置]![陀螺儀[角運動檢測裝置]](/img/7/8c9/wZwpmLyEzN0YDMzETN2IDN0UTMyITNykTO0EDMwAjMwUzLxUzLyEzLt92YucmbvRWdo5Cd0FmLxE2LvoDc0RHa.jpg) 陀螺儀[角運動檢測裝置]
陀螺儀[角運動檢測裝置]![陀螺儀[角運動檢測裝置]](/img/1/89b/wZwpmL3QDOxEDMygzMxIDN0UTMyITNykTO0EDMwAjMwUzL4MzLzEzLt92YucmbvRWdo5Cd0FmLwE2LvoDc0RHa.jpg) 陀螺儀[角運動檢測裝置]
陀螺儀[角運動檢測裝置]![陀螺儀[角運動檢測裝置]](/img/e/c36/wZwpmLxAzMwITNyADO4EDN0UTMyITNykTO0EDMwAjMwUzLwgzL4IzLt92YucmbvRWdo5Cd0FmLwE2LvoDc0RHa.jpg) 陀螺儀[角運動檢測裝置]
陀螺儀[角運動檢測裝置]![陀螺儀[角運動檢測裝置]](/img/7/8f9/wZwpmLyYzN5IjNxITM0EDN0UTMyITNykTO0EDMwAjMwUzLyEzLwAzLt92YucmbvRWdo5Cd0FmLxE2LvoDc0RHa.jpg) 陀螺儀[角運動檢測裝置]
陀螺儀[角運動檢測裝置]![陀螺儀[角運動檢測裝置]](/img/f/2d6/wZwpmLxUjNwETO0ATN1ATN0UTMyITNykTO0EDMwAjMwUzLwUzL4MzLt92YucmbvRWdo5Cd0FmLxE2LvoDc0RHa.jpg) 陀螺儀[角運動檢測裝置]
陀螺儀[角運動檢測裝置]![陀螺儀[角運動檢測裝置]](/img/1/6f1/wZwpmLyIDO2YTO3YDOzEDN0UTMyITNykTO0EDMwAjMwUzL2gzL1EzLt92YucmbvRWdo5Cd0FmLxE2LvoDc0RHa.jpg) 陀螺儀[角運動檢測裝置]
陀螺儀[角運動檢測裝置]![陀螺儀[角運動檢測裝置]](/img/a/3d3/wZwpmLwIjM4cjN5EDOwIDN0UTMyITNykTO0EDMwAjMwUzLxgzL3MzLt92YucmbvRWdo5Cd0FmLzE2LvoDc0RHa.jpg) 陀螺儀[角運動檢測裝置]
陀螺儀[角運動檢測裝置]![陀螺儀[角運動檢測裝置]](/img/8/872/wZwpmLwEjM4YjM2UTM0IDN0UTMyITNykTO0EDMwAjMwUzL1EzL1gzLt92YucmbvRWdo5Cd0FmLyE2LvoDc0RHa.jpg) 陀螺儀[角運動檢測裝置]
陀螺儀[角運動檢測裝置]![陀螺儀[角運動檢測裝置]](/img/9/3b0/wZwpmLwEzMwUjNzQTM4EDN0UTMyITNykTO0EDMwAjMwUzL0EzLygzLt92YucmbvRWdo5Cd0FmLzE2LvoDc0RHa.jpg) 陀螺儀[角運動檢測裝置]
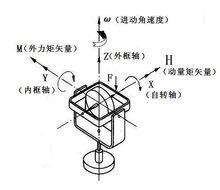
陀螺儀[角運動檢測裝置]當轉子對自轉軸的轉動慣量為 I,自轉角速度為ω時,則轉子的自轉動量矩為 L= Iω。假定支架軸承都絕對光滑,基座不能通過這些軸承把外力矩傳給轉子,且內、外兩框環的質量可忽略不計。於是,由動量矩守恆可知,均衡陀螺儀的轉子軸將能借慣性而在慣性空間保持不變方向。假如用某種方式給轉子以衝擊性外力矩,使動量矩 L獲得橫向增量 且 則新動量矩矢將偏轉一個小角 衝擊還使轉子軸的方向產生同一數量級的改變,但新的角速度方向已和新的動量矩方向不一致。衝擊後,轉子軸將緊靠新動量矩 L+△ L的方向作微幅高頻的抖動(章動),其幅度與ω成反比,而頻率則與ω成正比。由於ω很大,這種抖動實際上是不易察覺的,所以可認為衝擊並未明顯改變轉子軸的方向,即高速自轉均衡陀螺儀的轉子軸具有抗衝擊的能力,這種特性稱為定軸性。但是,如果轉子沒有自轉,那么任何微小衝擊將使轉子軸獲得角速度,而此後將按這個方向無限制地偏離下去。如果沿內環軸持久地施加外力矩 M,由於存在自轉動量矩 L,轉子不會沿 M方向繞內環軸轉動,而繞十字交叉軸(即外環軸)以某一角速度 Ω持久地轉動(鏇進),如圖2。由動量矩定理可以證明,鏇進角速度 Ω的大小反比於自轉角速度ω的大小,即 式中 θ為 ω和 Ω的交角。其次,由作用與反作用定律可知,轉子對外力矩 M的施加者有反作用力矩 K=- M。這個力矩稱為陀螺反抗力矩或陀螺力矩,其大小為:K= Ω L sin θ= I ωΩ sin θ= M,方向與 M相反。 K是科里奧利(慣性)力的矩。陀螺儀轉子還有其他慣性力矩。當鏇進非勻速時,角加速度和轉子對鏇進軸的轉動慣量的乘積冠以負號,稱為單軸轉動慣性力矩,它和陀螺力矩的大小屬同一數量級。 圖3 在外力矩作用下內外環的運動陀螺運動的近似微分方程組 用 A表示轉子連同內、外環一起對外環軸的轉動慣量, A表示轉子連同內環對內環軸的轉動慣量。 α、 β分別是外環和內環的轉角,且 β由兩環相垂直的位置(標記為 N)算起(圖3),當外力矩引起的內、外環鏇進角速度 都是小量,其平方項和乘積項都可忽略時,則各軸的外力矩(包括軸承中摩擦引起的力矩)和起決定性作用的慣性力矩可歸納如下表: 其他慣性力矩都是 的二階或更高階小項,因而都可以不計。由達朗伯原理可以立即寫出陀螺儀轉子軸繞外環和內環鏇進的近似微分方程組: 繞轉子軸的自轉角速度( ω+sin β)由外力矩維持不變。式(2)可以看成轉子-內環紐合體相對於外環的轉動方程。如果外環不轉,即 則 就是按牛頓定律形式直接寫出的轉動方程。現在由於環轉動而增加了修正項 此陀螺力矩對轉子的相對運動有表觀作用。可以看出,在此相對運動中,陀螺力矩有使自轉軸按最短途徑向鏇進軸轉動的趨勢。式(1)中也出現了陀螺力矩 這個力矩是轉子給予內環的慣性反抗,因此,對於轉子-內環-外環的組合來說,就和外力矩一樣(慣性力不服從作用反作用定律,轉子本身不因這個陀螺力矩而又受到反作用)(見動靜法)。方程(1)和(2)也可以套用於二自由度陀螺儀,如二自由度陀螺儀是由外環固定後構成的,則在方程組中應 從而式(2)就和轉子無自轉時的單軸轉動微分方程一樣-式(1)可用來確定外力矩 M,它等於陀螺力矩 上述近似理論足以解釋高速自轉陀螺儀的全部動力學特性。地球作為一個陀螺,它的姿態攝動也可以由此得到說明(見剛體定點轉動解法)。
原理
陀螺儀的原理就是,一個鏇轉物體的鏇轉軸所指的方向在不受外力影響時,是不會改變的。人們根據這個道理,用它來保持方向,製造出來的東西就叫做陀螺儀。陀螺儀在工作時要給它一個力,使它快速鏇轉起來,一般能達到每分鐘幾十萬轉,可以工作很長時間。然後用多種方法讀取軸所指示的方向,並自動將數據信號傳給控制系統。
在現實生活中,陀螺儀發生的進給運動是在重力力矩的作用下發生的。
特性
陀螺儀被廣泛用於航空、航天和航海領域。這是由於它的兩個基本特性:一為定軸性(inertia or rigidity),另一是進動性(precession),這兩種特性都是建立在角動量守恆的原則下。
定軸性
當陀螺轉子以高速鏇轉時,在沒有任何外力矩作用在陀螺儀上時,陀螺儀的自轉軸在慣性空間中的指向保持穩定不變,即指向一個固定的方向;同時反抗任何改變轉子軸向的力量。這種物理現象稱為陀螺儀的定軸性或穩定性。其穩定性隨以下的物理量而改變:
 陀螺儀
陀螺儀1.轉子的轉動慣量愈大,穩定性愈好;
2.轉子角速度愈大,穩定性愈好。
所謂的“轉動慣量”,是描述剛體在轉動中的慣性大小的物理量。當以相同的力矩分別作用於兩個繞定軸轉動的不同剛體時,它們所獲得的角速度一般是不一樣的,轉動慣量大的剛體所獲得的角速度小,也就是保持原有轉動狀態的慣性大;反之,轉動慣量小的剛體所獲得的角速度大,也就是保持原有轉動狀態的慣性小。
進動性
當轉子高速鏇轉時,若外力矩作用於外環軸,陀螺儀將繞內環軸轉動;若外力矩作用於內環軸,陀螺儀將繞外環軸轉動。其轉動角速度方向與外力矩作用方向互相垂直。這種特性,叫做陀螺儀的進動性。進動角速度的方向取決於動量矩H的方向(與轉子自轉角速度矢量的方向一致)和外力矩M的方向,而且是自轉角速度矢量以最短的路徑追趕外力矩。如右圖。
 進動方向
進動方向這可用右手定則判定。即伸直右手,大拇指與食指垂直,手指順著自轉軸的方向,手掌朝外力矩的正方向,然後手掌與4指彎曲握拳,則大拇指的方向就是進動角速度的方向。
進動角速度的大小取決於轉子動量矩H的大小和外力矩M的大小,其計算式為進動角速度ω=M/H。
進動性的大小也有三個影響的因素:
1.外界作用力愈大,其進動角速度也愈大;
2.轉子的轉動慣量愈大,進動角速度愈小;
3.轉子的角速度愈大,進動角速度愈小。
功能分類
利用陀螺儀的動力學特性製成的各種儀表或裝置,主要有以下幾種:
陀螺方向儀
能給出飛行物體轉彎角度和航向指示的陀螺裝置。它是三自由度均衡陀螺儀,其底座固連在飛機上,轉子軸提供慣性空間的給定方向。若開始時轉子軸水平放置並指向儀表的零方位,則當飛機繞鉛直軸轉彎時,儀表就相對轉子軸轉動,從而能給出轉彎的角度和航向的指示。由於摩擦及其他干擾,轉子軸會逐漸偏離原始方向,因此每隔一段時間(如15分鐘)須對照精密羅盤作一次人工調整。
陀螺羅盤
供航行和飛行物體作方向基準用的尋找並跟蹤地理子午面的三自由度陀螺儀。其外環軸鉛直,轉子軸水平置於子午面內,正端指北;其重心沿鉛垂軸向下或向上偏離支承中心。轉子軸偏離子午面時同時偏離水平面而產生重力矩使陀螺鏇進到子午面,這種利用重力矩的陀螺羅盤稱擺式羅盤。21世紀發展為利用自動控制系統代替重力擺的電控陀螺羅盤,並創造出能同時指示水平面和子午面的平台羅盤。
陀螺垂直儀
利用擺式敏感元件對三自由度陀螺儀施加修正力矩以指示地垂線的儀表,又稱陀螺水平儀。陀螺儀的殼體利用隨動系統跟蹤轉子軸位置,當轉子軸偏離地垂線時,固定在殼體上的擺式敏感元件輸出信號使力矩器產生修正力矩,轉子軸在力矩作用下鏇進回到地垂線位置。陀螺垂直儀是除陀螺擺以外套用於航空和航海導航系統的又一種地垂線指示或量測儀表。
陀螺穩定器
穩定船體的陀螺裝置。20世紀初使用的施利克被動式穩定器實質上是一個裝在船上的大型二自由度重力陀螺儀,其轉子軸鉛直放置,框架軸平行於船的橫軸。當船體側搖時,陀螺力矩迫使框架攜帶轉子一起相對於船體鏇進。這種搖擺式鏇進引起另一個陀螺力矩,對船體產生穩定作用。斯佩里主動式穩定器是在上述裝置的基礎上增加一個小型操縱陀螺儀,其轉子沿船橫軸放置。一旦船體側傾,小陀螺沿其鉛直軸鏇進,從而使主陀螺儀框架軸上的控制馬達及時開動,在該軸上施加與原陀螺力矩方向相同的主動力矩,藉以加強框架的鏇進和由此鏇進產生的對船體的穩定作用。
速率陀螺儀
用以直接測定運載器角速率的二自由度陀螺裝置。把均衡陀螺儀的外環固定在運載器上並令內環軸垂直於要測量角速率的軸。當運載器連同外環以角速度繞測量軸鏇進時,陀螺力矩將迫使內環連同轉子一起相對運載器鏇進。陀螺儀中有彈簧限制這個相對鏇進,而內環的鏇進角正比於彈簧的變形量。由平衡時的內環鏇進角即可求得陀螺力矩和運載器的角速率。積分陀螺儀與速率陀螺儀的不同處只在於用線性阻尼器代替彈簧約束。當運載器作任意變速轉動時,積分陀螺儀的輸出量是繞測量軸的轉角(即角速度的積分)。以上兩種陀螺儀在遠距離測量系統或自動控制、慣性導航平台中使用較多。
陀螺穩定平台
以陀螺儀為核心元件,使被穩定對象相對慣性空間的給定姿態保持穩定的裝置。穩定平台通常利用由外環和內環構成制平台框架軸上的力矩器以產生力矩與干擾力矩平衡使陀螺儀停止鏇進的穩定平台稱為動力陀螺穩定器。陀螺穩定平台根據對象能保持穩定的轉軸數目分為單軸、雙軸和三軸陀螺穩定平台。陀螺穩定平台可用來穩定那些需要精確定向的儀表和設備,如測量儀器、天線等,並已廣泛用於航空和航海的導航系統及火控、雷達的萬向支架支承。根據不同原理方案使用各種類型陀螺儀為元件。其中利用陀螺鏇進產生的陀螺力矩抵抗干擾力矩,然後輸出信號控、照相系統。
感測器
陀螺儀感測器是一個簡單易用的基於自由空間移動和手勢的定位和控制系統。在假象的平面上揮動滑鼠,螢幕上的游標就會跟著移動,並可以繞著連結畫圈和點擊按鍵。當你正在演講或離開桌子時,這些操作都能夠很方便地實現。 陀螺儀感測器原本是運用到直升機模型上的,已經被廣泛運用於手機這類移動便攜設備上(IPHONE的三軸陀螺儀技術)。
光纖陀螺儀
光纖陀螺儀是以光導纖維線圈為基礎的敏感元件, 由雷射二極體發射出的光線朝兩個方向沿光導纖維傳播。光傳播路徑的變化,決定了敏感元件的角位移。光纖陀螺儀與傳統的機械陀螺儀相比,優點是全固態,沒有鏇轉部件和摩擦部件,壽命長,動態範圍大,瞬時啟動,結構簡單,尺寸小,重量輕。與雷射陀螺儀相比,光纖陀螺儀沒有閉鎖問題,也不用在石英塊精密加工出光路,成本低。
雷射陀螺儀
雷射陀螺儀的原理是利用光程差來測量鏇轉角速度(Sagnac效應)。在閉合光路中,由同一光源發出的沿順時針方向和反時針方向傳輸的兩束光和光干涉,利用檢測相位差或干涉條紋的變化,就可以測出閉合光路鏇轉角速度。
MEMS陀螺儀
基於MEMS的陀螺儀價格相比光纖或者雷射陀螺便宜很多,但使用精度非常低,需要使用參考感測器進行補償,以提高使用精度,ADI公司是低成本的MEMS陀螺儀的主要製造商,VMSENS提供的AHRS系統正是通過這種方式,對低成本的MEMS陀螺儀進行輔助補償實現的。
基於MEMS 技術的陀螺因其成本低,能批量生產,已經能夠廣泛套用於汽車牽引控制系統、醫用設備、軍事設備等低成本需求套用中。
現代儀器
 陀螺儀
陀螺儀現代陀螺儀是一種能夠精確地確定運動物體的方位的儀器,它是現代航空,航海,航天和國防工業中廣泛使用的一種慣性導航儀器,它的發展對一個國家的工業,國防和其它高科技的發展具有十分重要的戰略意義。傳統的慣性陀螺儀主要是指機械式的陀螺儀,機械式的陀螺儀對工藝結構的要求很高,結構複雜,它的精度受到了很多方面的制約。自從上個世紀七十年代以來,現代陀螺儀的發展已經進入了一個全新的階段。1976年 等提出了現代光纖陀螺儀的基本構想,到八十年代以後,現代光纖陀螺儀就得到了非常迅速的發展,與此同時雷射諧振陀螺儀也有了很大的發展。光纖陀螺儀具有結構緊湊,靈敏度高,工作可靠等等優點,關鍵部件和光纖陀螺儀同時發展的除了環式雷射陀螺儀外,還有現代集成式的振動陀螺儀,集成式的振動陀螺儀具有更高的集成度,體積更小,也是現代陀螺儀的一個重要的發展方向。
現代光纖陀螺儀包括干涉式陀螺儀和諧振式陀螺儀兩種,它們都是根據塞格尼克的理論發展起來的。塞格尼克理論的要點是這樣的:當光束在一個環形的通道中前進時,如果環形通道本身具有一個轉動速度,那么光線沿著通道轉動的方向前進所需要的時間要比沿著這個通道轉動相反的方向前進所需要的時間要多。也就是說當光學環路轉動時,在不同的前進方向上,光學環路的光程相對於環路在靜止時的光程都會產生變化。利用這種光程的變化,如果使不同方向上前進的光之間產生干涉來測量環路的轉動速度,就可以製造出干涉式光纖陀螺儀,如果利用這種環路光程的變化來實現在環路中不斷循環的光之間的干涉,也就是通過調整光纖環路的光的諧振頻率進而測量環路的轉動速度,就可以製造出諧振式的光纖陀螺儀。從這個簡單的介紹可以看出,干涉式陀螺儀在實現干涉時的光程差小,所以它所要求的光源可以有較大的頻譜寬度,而諧振式的陀螺儀在實現干涉時,它的光程差較大,所以它所要求的光源必須有很好的單色性。
用途
 陀螺儀構造
陀螺儀構造陀螺儀器最早是用於航海導航,但隨著科學技術的發展,它在航空和航天事業中也得到廣泛的套用。陀螺儀器不僅可以作為指示儀表,而更重要的是它可以作為自動控制系統中的一個敏感元件,即可作為信號感測器。根據需要,陀螺儀器能提供準確的方位、水平、位置、速度和加速度等信號,以便駕駛員或用自動導航儀來控制飛機、艦船或太空梭等航行體按一定的航線飛行,而在飛彈、衛星運載器或空間探測火箭等航行體的制導中,則直接利用這些信號完成航行體的姿態控制和軌道控制。作為穩定器,陀螺儀器能使列車在單軌上行駛,能減小船舶在風浪中的搖擺,能使安裝在飛機或衛星上的照相機相對地面穩定等等。作為精密測試儀器,陀螺儀器能夠為地面設施、礦山隧道、地下鐵路、石油鑽探以及飛彈發射井等提供準確的方位基準。由此可見,陀螺儀器的套用範圍是相當廣泛的,它在現代化的國防建設和國民經濟建設中均占重要的地位。
廣泛使用的MEMS陀螺(微機械)可套用於航空、航天、航海、兵器、汽車、生物醫學、環境監控等領域。並且MEMS陀螺相比傳統的陀螺有明顯的 優勢:
1.體積小、重量輕。適合於對安裝空間和重量要求苛刻的場合,例如彈載測量等。
2.低成本。
3.高可靠性。內部無轉動部件,全固態裝置,抗大過載衝擊,工作壽命長。
4.低功耗。
5.大量程。適於高轉速大g值的場合。
6.易於數位化、智慧型化。可數字輸出,溫度補償,零位校正等。
基本部件
從力學的觀點近似的分析陀螺的運動時,可以把它看成是一個剛體,剛體上有一個萬向支點,而陀螺可以繞著這個支點作三個自由度的轉動,所以陀螺的運動是屬於剛體繞一個定點的轉動運動。更確切地說,一個繞對稱軸高速鏇轉的飛輪轉子叫陀螺。將陀螺安裝在框架裝置上,使陀螺的自轉軸有角轉動的自由度,這種裝置的總體叫做陀螺儀。
陀螺儀的基本部件有:
(1) 陀螺轉子(常採用同步電機、磁滯電機、三相交流電機等拖動方法來使陀螺轉子繞自轉軸高速鏇轉,並見其轉速近似為常值)
(2) 內、外框架(或稱內、外環,它是使陀螺自轉軸獲得所需角轉動自由度的結構)
(3) 附屬檔案(是指力矩馬達、信號感測器等)。
基本類型
根據框架的數目和支承的形式以及附屬檔案的性質決定陀螺儀的類型有:
三自由度陀螺儀(具有內、外兩個框架,使轉子自轉軸具有兩個轉動自由度。在沒有任何力矩裝置時,它就是一個自由陀螺儀)。
二自由度陀螺儀(只有一個框架,使轉子自轉軸具有一個轉動自由度)。
根據二自由度陀螺儀中所使用的反作用力矩的性質,可以把這種陀螺儀分成三種類型:
速率陀螺儀(它使用的反作力矩是彈性力矩)
積分陀螺儀(它使用的反作用力矩是阻尼力矩)
無約束陀螺(它僅有慣性反作用力矩)
除了機、電框架式陀螺儀以外,還出現了某些新型陀螺儀,如靜電式自由轉子陀螺儀,撓性陀螺儀,雷射陀螺儀等。
二自由度
二自由度陀螺儀的轉子支承在一個框架內,沒有外框架,因而轉子自轉有一個進動自由度,即少了垂直於內框架軸和自轉軸方向的轉動自由度。因此二自由度陀螺儀與三自由度陀螺儀的特性也有所不同。
進動性是三自由度陀螺儀的基本特性之—,當繞內框架軸作用外力矩時,將使高速鏇轉的轉子自轉軸產生繞外框架軸的進動,而繞外框架軸作用外力矩時,將使轉子軸產生繞內框架軸的進動。
定軸性是三自由度陀螺儀的另一基本特性。無論基座繞陀螺儀自轉軸轉動,還是繞內框架軸或外框架軸方向轉動,都不會直接帶動陀螺轉子一起轉動(指轉子自轉之外的轉動)。由內、外框架所組成的框架裝置,將基座的轉動與陀螺轉子隔離開來。這樣,如果陀螺儀自轉軸穩定在慣性空間的某個方位上,當基座轉動時,它仍然穩定在原來的方位上。
對於二自由度陀螺儀,當基座繞陀螺儀自轉軸或內框架軸方向轉動時,仍然不會帶動轉子一起轉動,即內框架仍然起隔離運動的作用。但是,當基座繞陀螺儀缺少自由度的x軸方向以角速度ωx轉動時,由於陀螺儀繞該軸沒有轉動自由度,所以基座轉動時,就通過內框架軸上的一對支承帶動陀螺轉子一起轉動。但陀螺儀自轉軸仍盡力保持其原來的空間方位不變。因此,基座轉動時,內框架軸上的一對支承就有推力F作用在內框架軸的兩端,而形成作用在陀螺儀上的推力矩mx, 其方向垂直於動量矩H,並沿x鈾正向。由於陀螺儀繞內框架軸有轉動的自由度,所以這個推力矩就使陀螺儀產生繞內框架軸的進動,進動角速度β指向內框架軸y的正向,使轉子軸趨向與x軸重合。
因此,當基座繞陀螺儀缺少自由度的方向轉動時,將強迫陀螺儀跟隨基座轉動,同時陀螺儀轉子軸繞內框架軸進動。結果使轉子軸趨向與基座轉動角速度的方向重合。即二自由度陀螺儀具有敏感繞其缺少轉動自由度方向鏇轉角速度的特性。
二自由度陀螺儀受到沿內框架軸向外力矩作用時,轉子軸繞內框軸運動。
沿內框架軸向作用力矩時轉子軸的運動。設沿內框架鈾y的正向有外力矩My作用,則二自由度陀螺儀的轉子軸將力圖以角速度My/H繞x軸的負向進動,如圖3所示。由於陀螺轉子軸繞x軸方向不能轉動,這個進動是不可能實現的。但其進動趨勢仍然存在,並對內框架軸兩端的支承施加壓力,這樣,支承就產生約束反力F作用在內框架軸兩端,而形成作用在陀螺儀上的約束反力矩mx,其方向垂直於動量矩H並沿x軸的正向。由於轉子軸繞內框架軸存在轉動自由度,所以在這個約束反力矩mx的作用下,陀螺儀轉子軸就繞內框架軸以β的角速度沿y軸正向進動。簡單地說,如果陀螺繞x軸方向不能轉動,那么在繞內框架軸向的外力矩作用下,陀螺儀的轉子軸也繞內框架軸轉動。
陀螺繞主軸轉動的角動量以H表示,H=JsΩ,式中Js為陀螺轉子的轉動慣量。
工作原理
高速鏇轉的物體的鏇轉軸,對於改變其方向的外力作用有趨向於垂直方向的傾向。而且,鏇轉物體在橫向傾斜時,重力會向增加傾斜的方向作用,而軸則向垂直方向運動,就產生了搖頭的運動(歲差運動)。當陀螺經緯儀的陀螺鏇轉軸以水平軸鏇轉時,由於地球的鏇轉而受到鉛直方向鏇轉力,陀螺的鏇轉體向水平面內的子午線方向產生歲差運動。當軸平行於子午線而靜止時可加以套用。
構造
陀螺經緯儀的陀螺裝置由陀螺部分和電源部分組成。此陀螺裝置與全站儀結合而成。陀螺本體在裝置內用絲線吊起使鏇轉軸處於水平。當陀螺鏇轉時,由於地球的自轉,鏇轉軸在水平面內以真北為中心產生緩慢的歲差運動。鏇轉軸的方向由裝置外的目鏡可以進行觀測,陀螺指針的振動中心方向指向真北。利用陀螺經緯儀的真北測定方法有“追尾測定”和“時間測定”等。
追尾測定[反轉法]
利用全站儀的水平微動螺絲對陀螺經緯儀顯示歲差運動的刻度盤進行追尾。在震動方向反轉的點上(此時運動停止)讀取水平角。如此繼續測定之,求得其平均震動的中心角。用此方法進行20分鐘的觀測可以求得+/-0。5分的真北方向。
時間測定[通過法]
用追尾測定觀測真北方向後,陀螺經緯儀指向了真北方向,其指針由於歲差運動而左右擺動。用全站儀的水平微動螺絲對指針的擺動進行追尾,當指針通過0點時反覆記錄水平角,可以提高時間測定的精度,並以+/-20秒的精度求得真北方向。
套用實例
3.1 隧道中心線測量
在隧道等挖掘工程中,坑內的中心線測量一般採用難以保證精度的長距離導線。特別是進行盾構挖掘(shield tunnel)的情況,從立坑的短基準中心線出發必須有很高的測角精度和移站精度,測量中還要經常進行地面和地下的對應檢查,以確保測量的精度。特別是在密集的城市地區,不可能進行過多的檢測作業而遇到困難。如果使用陀螺經緯儀可以得到絕對高精度的方位基準,而且可減少耗費很高的檢測作業(檢查點最少),是一種效率很高的中心線測量方法。
3.2 通視障礙時的方向角獲取
當有通視障礙,不能從已知點取得方向角時,可以採用天文測量或陀螺經緯儀測量的方法獲取方向角(根據建設省測量規範)。與天文測量比較,陀螺經緯儀測量的方法有很多優越性:對天氣的依賴少、雲的多少無關、無須複雜的天文計算、在現場可以得到任意測線的方向角而容易計算閉合差。
3.3 日影計算所需的真北測定
在城市或近郊地區對高層建築有日照或日影條件的高度限制。在建築申請時,要附加日影圖。此日影圖是指,在冬至的真太陽時的8點到16點為基準,進行為了計算、圖面繪製所需要的高精度真北方向測定。使用陀螺經緯儀測量可以獲得不受天氣、時間影響的真北測量。
4,陀螺儀的各種品牌及購買途徑
美國ADI公司 TI公司 ST公司 俄羅斯 Fizoptika 挪威SENSONOR公司 日本Silicon美國BEI村田 EPSON
美國CrossbowKVH國內的一些高校和研究所也在研發生產一些陀螺儀,國內的一些公司和北京中發電子市場3176代理某些陀螺儀。
智慧型手機套用
1、陀螺儀自被發明開始,就用於導航,先是德國人將其套用在V1、V2火箭上,因此,如果配合GPS,手機的導航能力將達到前所未有的水準。實際上,很多專業手持式GPS上也裝了陀螺儀,如果手機上安裝了相應的軟體,導航能力絕不亞於很多船舶、飛機上用的導航儀。還可以實現GPS的慣性導航:當汽車行駛到隧道或城市高大建築物附近,沒有GPS訊號時,可以通過陀螺儀來測量汽車的偏航或直線運動位移,從而繼續導航。
2、可以和手機上的攝像頭配合使用,比如防抖,在拍照時的維持圖像的穩定,防止由於手的抖動對拍照質量的影響。在按下快門時,記錄手的抖動動作,將手的抖動反饋給圖像處理器,可以讓手機捕捉到更清晰穩定的畫面。
3、各類遊戲的感測器,比如飛行遊戲,體育類遊戲,甚至包括一些第一視角類射擊遊戲,陀螺儀完整監測遊戲者手的位移,從而實現各種遊戲操作效果。有關這點,想必用過任天堂WII的網友會有很深的感受。
4、可以用作輸入設備,陀螺儀相當於一個立體的滑鼠,這個功能和第三大用途中的遊戲感測器很類似,甚至可以認為是一種類型。通過小幅度的傾斜,偏轉手機,實現選單,目錄的選擇和操作的執行。(比如前後傾斜手機,實現通訊錄條目的上下滾動;左右傾斜手機,實現瀏覽頁面的左右移動或者頁面的放大或縮小。)
5、也是未來最有前景和套用範圍的用途。那就是可以幫助手機實現很多增強現實的功能。增強現實是才冒出的概念,和虛擬現實一樣,是計算機的一種套用。大意是可以通過手機或者電腦的處理能力,讓人們對現實中的一些物體有更深入的了解。如果大家不理解,舉個例子,前面有一個大樓,用手機攝像頭對準它,馬上就可以在螢幕上得到這座大樓的相關參數,比如樓的高度,寬度,海拔,如果連線到資料庫,甚至可以得到這座大廈的物主、建設時間、現在的用途、可容納的人數等等。
