
簡介
剛體對於一點的轉動慣性的量度。若Oxyz是固連在剛體上的一直角坐標系(圖1),l軸是通過坐標原點O的任意軸,它和各坐標軸Ox、Oy、Oz的夾角分別為α、β、γ;設剛體中任一質點P的質量為mi,它的坐標為(xi,yi,zi),則剛體對軸l的轉動慣量為式中為剛體對坐標軸Ox、Oy、Oz的轉動慣量。稱為慣性積。慣性積也依賴於剛體的質量、質量分布和各坐標軸的位置。但它的值可正可負,也可等於零。慣性積的量綱和轉動慣量相同,即等於ML2。剛體對過坐標原點O的任意軸l的轉動慣量I由六個量Ix、Iy、Iz、Ixy、Iyz、Izx及軸l對坐標軸Ox、Oy、Oz的方向餘弦決定。I是由剛體本身的質量、質量分布及軸l的方位來決定的,它是一個具有力學性質的量,它的值不因確定物體位置所選取的坐標系的不同而改變。對稱的慣量矩陣:是一個張量,稱為剛體關於原點O的慣量張量。正文
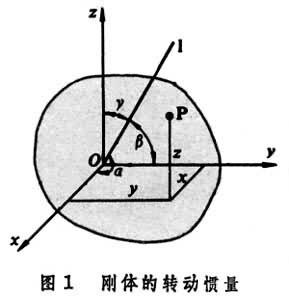
剛體對於一點的轉動慣性的量度。若Oxyz是固連在剛體上的一直角坐標系(圖1),l軸是通過坐標原點O的任意軸,它和各坐標軸Ox、Oy、Oz的夾角分別為α、β、γ;設剛體中任一質點P的質量為mi,它的坐標為(xi,yi,zi),則剛體對軸l的轉動慣量為

 為剛體對坐標軸Ox、Oy、Oz的轉動慣量。
為剛體對坐標軸Ox、Oy、Oz的轉動慣量。 
剛體對過坐標原點O 的任意軸l的轉動慣量I由六個量Ix、Iy、Iz、Ixy、Iyz、Izx及軸l對坐標軸Ox、Oy、Oz的方向餘弦決定。I是由剛體本身的質量、質量分布及軸l的方位來決定的,它是一個具有力學性質的量,它的值不因確定物體位置所選取的坐標系的不同而改變。對稱的慣量矩陣:
 慣量張量
慣量張量適當選擇坐標系Oxyz的方位,可使剛體的兩個慣性積同時為零,例如,
 ,這時,和這兩個慣性積同時相關的z軸稱為剛體在O點處的一個慣量主軸。一般地說,對於剛體上的任意一點O有三個互相正交的慣量主軸。剛體對慣量主軸的轉動慣量稱為主轉動慣量。如果慣量主軸還通過剛體的質心,則這樣的主軸稱為中心慣量主軸,剛體對中心慣量主軸的轉動慣量稱為中心主轉動慣量。當剛體繞中心慣量主軸之一轉動時,在軸承上將不會由於轉動而引起附加的動反力(見剛體的定軸轉動)。
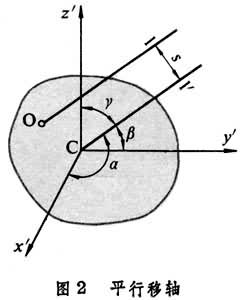
,這時,和這兩個慣性積同時相關的z軸稱為剛體在O點處的一個慣量主軸。一般地說,對於剛體上的任意一點O有三個互相正交的慣量主軸。剛體對慣量主軸的轉動慣量稱為主轉動慣量。如果慣量主軸還通過剛體的質心,則這樣的主軸稱為中心慣量主軸,剛體對中心慣量主軸的轉動慣量稱為中心主轉動慣量。當剛體繞中心慣量主軸之一轉動時,在軸承上將不會由於轉動而引起附加的動反力(見剛體的定軸轉動)。 若Iс尣′、Iсу′、Iсz′為剛體對以中心慣量主軸為坐標軸Cx┡、Cy┡、Cz┡的轉動慣量(圖2),則通過O點的任意軸l的轉動慣量為

 慣量張量
慣量張量配圖
相關連線
大家都知道,剛體繞定軸轉動的角動量表達式為:L=∑(r×Δmv)=∑Δmr×(ω×r)
此處我們為了顯得簡潔,去掉了每個腳標i。
假如這個剛體只繞z軸鏇轉,那么現在位置矢量r與角速度ω為:
r=(x,y,z)
ω=(0,0,ω)
現在,我們用矢量計算Lx、Ly和Lz,得到:
Lx=ω·∑(-xzΔm)
Ly=ω·∑(-yzΔm)
Lz=ω·∑(x²+y²)Δm
我們很熟悉Lz,它就是通常我們見到的Lz=Iω,但是,Lx=ω·∑(-xzΔm)和Ly=ω·∑(-yzΔm)是什麼?它們為什麼是這樣?
現在就讓我們來揭開這個秘密,因為雖然從數學上可以得到這兩項,卻不能理解它,將是一種缺憾——當然你可以不在乎,你可以只認為這兩項是其它坐標軸對這個坐標軸的貢獻,但是真正去了解一下“為什麼”將是有好處的。
我們只舉一個例子——x軸方向的多餘分量。
假設一塊剛體繞z軸逆時針正向轉動(右手法則!),那么對於x軸而言,根據同樣的法則,剛體上面的某一個小塊相對於x軸的速度將是與右手法則相反的(大拇指在x軸,看一看四指方向是否與小塊速度方向相反。請自己畫圖或想像)。
當小塊恰好在xoz平面上時,由於小塊繞z軸的角速度是ω,而離z軸的距離是x,所以小塊的線速度應該是v=xω。對於x軸而言,小塊離x軸距離為z,瞬時“繞”x軸的角動量就應該是z·Δmv。但是這與右手法則方向相反,所以應該加上一個負號,再對每個小塊求合:
Lx=∑-ωxz·Δm=ω·∑(-xzΔm)
我們考慮的是在xoz平面中的小塊,但不能總要求小塊在這個平面內,在求合的時候,其它很多小塊都不在這個平面內,但是這些物理量總會有一個投影在我們需要的平面中,所以上面的式子還是正確的。
對於自由的、繞不固定軸轉動的剛體,轉動慣量就應該寫成一個有9個元素的矩陣(張量)形式:
|∑m(y²+z²)-∑mxy-∑mxz|
I{ij}=|-∑myx∑m(x²+z²)-∑myz|
|-∑mzx-∑mzy∑m(x²+y²)|
而角動量就寫成這樣的張量表達形式: L{i}=I{ij}ω{j}
