分類
前方交會
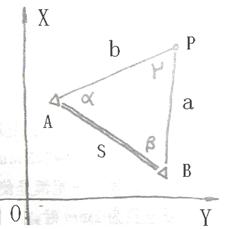
如果已知A、B兩點的坐標,為了計算未知點P的坐標,只要觀測∠A和∠B即可。這種測定未知點P的平面坐標的方法稱為前方交會。
側方交會
若觀測∠A和∠P或∠B和∠P,同樣可以測定未知點P的平面坐標,這種方法稱為側方交會。
後方交會
若在未知點P上瞄準A、B、C三個已知點,測得∠α和∠β,也可確定未知點P的平面坐標,這種方法稱為後方交會。
計算
 角度交會法
角度交會法已知條件A、B兩點坐標分別為(xA,yB)、(xB,yB),求p點的坐標。
待求數據p點的坐標(Xp,Yp)觀測數據
為確定P點的位置,經緯儀分別安置A、B兩點,用測回法觀測∠A、∠B
坐標計算
根據A、B兩點的坐標和∠A、∠B,P點坐標為: