簡介
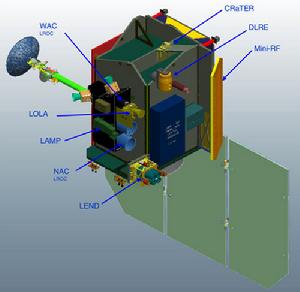 美國月球勘測軌道飛行器結構示意圖
美國月球勘測軌道飛行器結構示意圖LRO由美國宇航局位於馬里蘭州格林貝爾特的戈達德太空飛行中心的工程師研製。該飛行器原本計畫於2008年10月發射,但為了讓曾發生氫燃料漏泄的奮進號太空梭成功發射,月球勘測軌道飛行器的發射計畫遭到了推遲。這個屬於月球先鋒機器人計畫(Lunar Precursor Robotic Program)的無人駕駛飛行器於2009年6月18日在佛羅里達州卡納維拉爾角空軍基地發射升空。這是10年來美國首個目標為月球的航天任務。月球勘測軌道飛行器的首要任務的主要目標是完成美國的外層空間探索計畫。為了成功的達到“計畫”的目標,包括人類再次登月,該飛行器將會勘測月球的資源並決定可能的登入地點。它將沿著繞月軌道運行,這有助於繪製月球表面的三維地圖。
搭載了月球勘測軌道飛行器的擎天神五號運載火箭還攜帶了月球坑觀測和遙感衛星(LCROSS),它的任務是在月球表面實施兩次撞擊,探測月球表面的深坑以及在地表之下尋找月球水冰存在的線索。月球坑觀測和遙感衛星和月球勘測軌道飛行器是美國國家航空航天局外層空間探索計畫重返月球的先鋒。
在月球勘測軌道飛行器發射之前,美國國家航空航天局向公眾提供了將他們的名字儲存於月球勘測軌道飛行器上的一個微晶片的機會。這個收集計畫的截止日期是2008年7月31日。總共收集了大約16億個名字。任務
 美國月球勘測軌道飛行器模擬圖形
美國月球勘測軌道飛行器模擬圖形任務概況
LRO搭乘“宇宙神”V 401火箭升空飛往月球,整個過程將歷時大約4天。在此之後,LRO將進入一條橢圓形軌道,也就是所謂的試運轉軌道。從這條軌道,LRO將移身最終軌道——一條距月球表面大約50公里(約合31英里)的圓形軌道。LRO至少要在低極地軌道運行一年,獲取有關月球及其環境的詳細信息。當前的月球正以每年1.5英寸(約合3.81厘米)的速度遠離地球。
任務目標
LRO任務的目標是幫助美國宇航局鎖定登入點,尋找潛在資源,描繪當前的輻射環境以及示範新技術。LRO飛船將繞低極地軌道(據月球表面50公里)運行,執行為期一年的勘測任務,整個過程由宇航局探測系統任務理事會負責。科學家將利用LRO傳回的月球全局數據研發有用的工具,例如日間、晚間溫度圖、月球測地線格網、高清晰彩色圖像以及月球的紫外線反照率。
LRO的勘測重點將集中在月球極地地區,原因在於:極地可能持續接受太陽照射,水冰則可能位於永久性陰暗的極地隕坑內。雖然從本質上講LRO的任務目標就是探測,但藉助於所攜帶的一系列科學儀器以及此前月球任務留下的寶貴遺產,使得2010年的任務目標轉換能夠成為一種可能,也就是進入科學研究階段,這一階段由宇航局的科學任務理事會負責。
 美國月球勘測軌道飛行器
美國月球勘測軌道飛行器LRO獲取的全面月球數據能夠支持人類在太陽系的存在向外擴張。藉助於這些數據,LRO將幫助鎖定具有較高科學研究價值的潛在資源附近地區、有利地形以及環境,所有這些對未來機器人任務和載人月球任務至關重要。LRO獲取的所有數據以及由這些數據衍生的產物將成為宇航局行星數據系統一部分。該系統是一個向公眾公開的知識庫,儲存行星科學信息。原始以及經過處理的數據將幫助人們進一步了解月球環境,為太空人安全重返月球以及未來針對太陽系的載人探測任務鋪平道路。
LRO和LCROSS離開發射台
剛升空的擎天神五號運載火箭。美國國家航空航天局的戈達德太空飛行中心原本計畫將月球勘測軌道飛行器設計成一個在極軌道運行的大且精細的宇宙飛船,設計使用年限是一年。另外一個選擇是將任務的時間延長(延長至五年),這樣月球勘測軌道飛行器能夠成為一個未來月表任務的通信中繼器,例如登入器或者月球車。
月球勘測軌道飛行器的初步設計檢查於2006年3月完成,對遭到了批評的設計的重新改進也於同年11月完成。在2009年2月11日,月球勘測軌道飛行器從戈達德太空飛行中心運送至卡納維拉爾角空軍基地。
勘測的範圍
全月面地形測量: 在位於外太空的繞月軌道上通過游離輻射對地形進行測繪。對月球極地,包括有可能沉積有月冰和一些常年不見陽光的地方進行測量。月球極地的溫度約為-223oC (-370oF) 也許能夠保存月冰。高解析度測繪(最大值0.5米),以幫助選擇和描繪未來的登月點“識別月球上的地形起伏狀況,而且斜坡對安全著陸也有關鍵性的影響,”美國國家航空航天局探測部門的首席月球科學家Mike Wargo說道。除此之外,它還將首次提供一些留在月球表面的阿波羅計畫的設備。這個價值五億八千三百萬美金的航天計畫包括了一個價值五億零四百萬美金,重約4200kg的月球勘測軌道飛行器和一個價值七千九百萬美金的月球坑觀測和遙感衛星。
搭載儀器
搭載的儀器這個飛行器一共搭載了6個儀器和一個技術演示,主要任務是搜尋月球表面適宜將來載人探測器登入的地點、勘測月球資源、觀察月球輻射環境以及測試新的探月技術。藉助它傳回的圖像,科學家們將可以繪製高清三維月球地圖。“月球坑觀測和感測衛星”則會利用運載火箭的第二級,在月球表面實施兩次撞擊。通過這兩次前所未有的撞擊,科學家們可以探測月球表面的深坑,在地表之下尋找月球水冰存在的線索。探測器上攜帶的微型雷達還將對月球兩極進行拍照。
CRaTER—測量輻射效應的宇宙射線望遠鏡,目標是將給出月球輻射環境的特徵,確定其對生物可能產生的影響。
DLRE—月球輻射計實驗,目標是對月面進行熱繪測量,為未來的試驗和探測提供資料。LAMP—萊曼阿爾法測繪項目,目標是通過紫外線探測環形山中的永久陰影地區,並尋找水冰。
LEND—月球探索中子探測器,目標是測量月球,繪製地圖,發現有可能含有水凍的地區。
LOLA—月球軌道飛行器雷射測高儀,目標是提供整個月球的精確地形模型和地理上的測量。
LROC—月球偵查軌道器照相機,目標是提供登入地認證的測量要求和月極地區的光照情況。月球偵查軌道器照相機包含一對窄角相機(NAC)和一個廣角照相機(WAC)。月球偵查軌道器照相機將會數次飛躍具有歷史意義的阿波羅登月點,通過高解析度的照相機,月球車和登月艙降落台以及它們的陰影將會被看得十分清楚。這些照片估計將會提高公眾對登月真實性的承認度,並摧毀阿波羅登月計畫陰謀論。
Mini-RF—微型射頻技術顯示器雷達,目標是展示新的輕型合成孔徑雷達以及通信技術,並找出有可能含有水凍的地方。月球勘測軌道飛行器的高解析度映像將會顯示出一些大型的留在月球上的人造物體並將會大概帶回70–100 TB的映像資料。 月球勘測軌道飛行器將會在所有留在月球上的人造物體之上50km遠的地方飛躍它們。人們希望能在人類登月40周年之際拍到阿波羅11號登月點的照片。
詳細參數
 美國月球勘測軌道飛行器
美國月球勘測軌道飛行器發射日期:台北時間2009年6月19日凌晨5:12分(美國東部時間18日下午5點12分)。
發射地點:美國佛羅里達州卡納維拉爾角空軍基地41號發射場。
所用燃料:第一級使用RP-1(一種高度精煉的煤油)和液態氧,“半人馬座”火箭上級使用液態氫和液態氧。
軌道:月球勘測軌道飛行器在一條距離月表31英里(約合50公里)的圓形極地軌道運行。月球隕坑觀測與感測衛星(以下簡稱LCROSS)則在地月系統周圍一條月球引力助推及月球返回軌道(以下簡稱LGALRO)運行,與黃道平面大約成80度角。
軌道周期:LRO軌道(月球極地軌道)周期為113分鐘。每一條LCROSS軌道周期大約為37天左右。
持續時間:LRO首先執行為期一年的探測任務,而後可能進行為期3年的科學研究任務。
重量:總發射重量為1916公斤(約合4224磅)。乾重量為1018公斤(約合2244磅),燃料重量為898公斤(約合1980磅)。
功率:飛船功率為685瓦。
尺寸:在摺疊放入火箭之內時——太陽能電池板陣列和高增益天線被摺疊起來——LRO的高度為152英寸(約合3.86米)。從儀器艙到被摺疊的太陽能電池板陣列的長度為103英寸(約合2.61米),從被摺疊的高增益天線到微型射頻天線的長度為108英寸(約合2.74米)。發射之後,LRO展開後的太陽能電池板陣列面積為168英寸(約合4.26)× 126英寸(約合3.2)。3塊電池板的總寬度為168英寸,伸出飛船126英寸。展開後的高增益天線向外伸出102英寸(約合2.59米)。指向控制:LRO指向控制保持在60角秒。
太陽能電視板陣列:LRO裝有鉸接的太陽能電池板以及鋰離子電池。
遙感勘測:利用Ka波段高速下行鏈路和S波段低速上行/下行鏈路進行遙感勘測。數據量和最大下行鏈路速度:數據量為每天461 Gb,最大下行速度為每秒100 Mb。
軌道:LRO飛往月球的旅程歷時大約4天時間。在此之後,LRO將進入一個橢圓形軌道,也就是所謂的試運轉軌道。從這條軌道,LRO將移身最終軌道——一條距月球表面大約50公里(約合31英里)的圓形軌道。
任務操作中心:任務操作中心位於美國宇航局的戈達德太空飛行中心。太空飛行中心的工程師將在分離後、進入月球軌道期間以及任務執行過程中控制LRO。任務操作中心負責向高級研究員傳送原始數據。
行星數據系統:在最初的任務完成後6個月內,高級研究員負責將科學儀器獲得的數據傳送給行星數據系統。行星數據系統是一個向公眾公開的知識庫,用於儲存行星任務的科學數據。
項目成本:LRO任務成本大約在5億美元左右。科學儀器及研究員
LRO所攜帶的7個科學儀器分別是輻射效應宇宙射線望遠鏡(以下簡稱CRaTER)、多通道太陽發射率和紅外濾波輻射儀(以下簡稱diviner)、“萊曼-阿爾法”測繪項目(以下簡稱LAMP)、月球勘探中子探測器(以下簡稱LEND)、月球軌道器雷射測高儀(以下簡稱LOLA)、月球勘測軌道器照相機(以下簡稱LROC)以及微射頻新型合成孔徑雷達(以下簡稱Mini-RF)。
CRaTER 首席研究員是波士頓大學的哈爾蘭·斯彭斯(Harlan Spence)博士。該儀器重量為5.4公斤(約合12磅),平均功率為7.3瓦。
Diviner 首席研究員是加利福尼亞州洛杉磯加州大學的大衛·佩奇(David Paige)博士。該儀器重量為11公斤(約合24磅),平均功率為24.7瓦。
LAMP 首席研究員是德克薩斯州聖安東尼奧西南研究院的蘭迪·格拉德斯通(Randy Gladstone)博士。該儀器重6.1公斤(約合13磅),平均功率為4瓦。
LEND 首席研究員是俄羅斯莫斯科太空研究院的伊格爾·米特羅法諾夫(Igor Mitrofanov)博士。該儀器重25.8公斤(約合57磅),平均功率為11.6瓦。
LOLA 首席研究員是戈達德太空飛行中心的大衛·史密斯(David Smith)博士。該儀器重11.3公斤(約合25磅),平均功率為33.4瓦。
LROC 首席研究員是位於亞利桑那州滕比的亞利桑那州大學博士馬克·羅賓森(Mark Robinson)。該儀器重19.2公斤(約合42磅),平均功率為24瓦。
Mini-RF 首席研究員是休斯敦月球與行星研究院的斯圖爾特·諾澤特(Stewart Nozette)博士。該儀器重13.8公斤(約合30磅),平均功率為7瓦。
