
簡介
微波雷達是雷達是一種神奇的電學器具,它由電
 微波雷達
微波雷達它所依據的原理依然是“都卜勒效應”。雷達測速計發出一個頻率為10000兆赫的脈衝微波,如果微波射在靜止不動的車輛上,被反射回來,它的反射波頻率不會改變,仍然是10000兆赫。反之,如果車輛在行駛,而且速度很快,那么,根據多卜勒效應,反射波頻率與發射波的頻率就不相同。通過對這種微波頻率微細變化的精確測定,求出頻率的差異,通過電腦就可以換算出汽車的速度了。當然,這一切都是自動進行的。雷達測速計的測速範圍大約在每小時24公里到255公里之間,測速範圍比較大,精確度也相當高,車速在每小時100公里時,誤差不會超過1公里/小時。測速雷達朝向公路,可以測量車速,如果指向天空,就可以測雲層的高度,測雲層的速度。當然,要測幾十公里外,甚至上百公里外的飛機,也是這個原理,只不過要向它掃描的空間連續發射微波束,這些微波束遇到飛機再反射回來,已經極其微弱了,要想把它接收到,分辨清並計算出來,就很困難了,這就需要一個龐大的靈敏的雷達。微波信號源採用全固態器件,合金捛腔體喇叭形天線收發,混頻管接收經反射後的微波信號與發射波信號混頻。被測物體移動時,由於直達波和反射波混合的結果在接收檢波器上混頻出差拍信號,該差拍信號的頻率和移動物體速度成線性關係。速度越快,差拍頻率越高,速度越慢,差拍信號頻率越低。被測物體與微波腔體振盪器不移動時,輸出的頻率為零。探頭對目標距離近信號輸出幅度大,探頭對目標距離遠信號輸出幅度小.利用信號幅度特性可得到距離信息。
微波測距原理
本雷達測距感測器是依據調頻連續波原理(FMCWFrequencyModulatedContinuousWave)為基礎的雷達物位計,它區別於脈衝式雷達,並因其探測近距離優越的性能而廣泛套用於汽車防撞及工業物位領域。物位測量精度不受介質介電常數、濃度(密度)、壓力和溫度的影響物位測量精度不受霧,泡沫、粉塵、蒸汽以及容器形狀影響。雷達使用線性調頻高頻信號,發射頻率隨一定時間間隔的線性(頻率),頻率範圍為10.5G,波長約為3cm。由於發射頻率是隨著信號調製的時間變化的,接收混頻後輸出與反射物體距離成比例的低頻回波信號。頻率是由當前發射頻率與接收的反射頻率的混頻獲取的。跟據不同的分辯率調製不同的FM信號
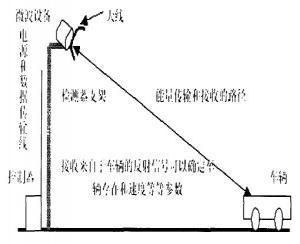
1.雷達信號經天線發射,遇到被測界面反射,經過時間t後,被天線及接收器接收。
2.當前發射波與被測界面反射波的差值被Hz為單位進行精確計算,頻率的差值是與天線到被測界面的距離成正比的,距離越大差值越大,反之亦然。
3.數位訊號處理過程中,時間信號通過“快速FFT變換”轉換成頻譜,形成距離計算的基礎,進而通過計算出物位距離/高度。
套用
微波雷達在道路交通安全領域的套用主要涉及雷達測速儀和汽車雷達防撞系統兩個方面。
雷達測速儀
 微波雷達
微波雷達而國產的雷達測速儀相對較少,主要以CS系列雷達測速儀為主。其性能跟國外的同類產品存在一定的差距,在國內外市場上的競爭力相對較弱。
汽車雷達防撞系統
微波雷達套用於汽車防撞系統始於上世紀60年代,發展至今也取得了很多成果且主要集中在歐、美、日等已開發國家,美國的汽車防撞雷達技術相對日本、歐洲諸國來說,起步較晚。但其技術卻處於領先水平。其中最具代表性的是Ford跟Eaton公司聯合研發的Vorad汽車雷達防撞系統。該系統可對lo7m(350ft)左右的20個目標進行探測,出現危險時可發出聲光報警,且可以與汽車制動機制相連實現自動剎車,是現今商業上最為成功的汽車雷達防撞系統。德國Benz公司於1997年研製出一種被稱為“速度一距離控制系統’,的雷達防撞系統,其探測距離達到150m,可實現對30個目標的同時跟蹤,且發射功率只有30mw,Benz公司也因此獲得了當年的德國工業革新獎。此外,德國的sense公司還研製出探測距離為6m(20ft)的倒車雷達系統(現有的倒車雷達多採用超音波技術)。
日本的汽車產業比較發達,在這方面的研究也比較早,可以說日本的五大汽車公司都有在做相關的研究工作.其中比較典型的產品是Mitsubishi和Hitachi合作開發的毫米波防撞系統,其探測距離在120m左右。
在國內,該項技術還處在起步階段,很多相關技術尚未成熟且處在研究當中。由於該技術具有廣泛的研究價值和套用前景,國內多家高校、企業、研究所都投身該項技術的研究當中。而本文所作的研究工作也是對該領域的一個積極探索。
