
正文
 天線座架
天線座架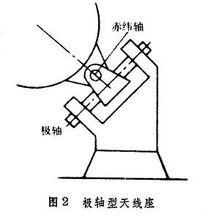 天線座架
天線座架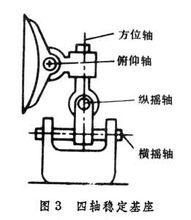 天線座架
天線座架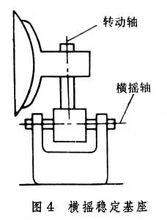 天線座架
天線座架支撐天線結構並使天線在規定空域內運動的裝置。它通過天線控制系統使天線按照預定的規律運動,或者跟隨目標運動;並且通過軸位檢測裝置,精確地測出目標的方位。
天線座架有多種結構型式:按轉軸的數目,可以分為一軸、二軸、三軸、四軸和固定不動的。搜尋、引導雷達在垂直方向上波瓣較寬或者垂直方向是電掃描的,只要求天線在方位上轉動,就能覆蓋預定的空間。跟蹤雷達、衛星通信地球站和射電望遠鏡,通常採用圓拋物面天線,波束窄,必須使天線在方位和俯仰上同時轉動才能掃掠整個空域。艦載和機載雷達為了補償艦艇縱、橫搖擺,或者飛機升降、滾翻的影響,常採用三軸或四軸的天線座。相控陣雷達天線波束是電控掃描的,微波接力通信天線用於定向傳輸,因此都可以採用固定不動的座架。在各種座架中,套用最廣的是兩軸天線座。兩軸天線座按座架的結構型式分為俯仰—方位型、X—Y型、極軸型等多種型式。
以地面為基準,所以也稱為地平式或經緯儀式天線座。方位軸與地面垂直,俯仰軸與方位軸垂直。這種座架的結構緊湊,承載能力大,調整測量方便,是兩軸天線座中套用最廣的座架型式。俯仰-方位型天線座又有三種基本型式:立軸式、轉台式和輪軌式。①立軸式天線座:用立軸(方位軸)支撐天線和方位轉動部分。中小型天線多數採用這種座架,它的基本結構簡單,設計、製造、維修都比較方便。②轉台式天線座:天線和方位轉動部分用能夠承受軸向載荷、徑向載荷和傾覆力矩的特大型滾動軸承或靜壓軸承來支承。這種型式承載能力大、剛度好、精度高、軸向尺寸小、重心低、穩定性好,通常用於大、中型天線。③輪軌式天線座:天線和方位轉動部分用滾輪和軌道支承。軌道直徑一般為天線口徑的1/2~2/3,滾輪和軌道也是方位驅動系統的末級傳動裝置。滾輪和軌道是摩擦傳動,所以方位驅動能力不僅決定於驅動電機的功率,而且還取決於驅動滾輪與軌道之間的靜摩擦力。為了保證方位的驅動能力,輪軌之間必須有足夠的正壓力和摩擦係數,所以一般用於大型天線。座架採用桁架結構,與前兩種型式相比,省略了大型方位軸承、方位大齒輪和大轉台。因此結構簡單、重量與口徑的比值小、造價低、安裝維修方便,而且能達到較高的結構精度。
俯仰-方位型天線座的缺點是在天頂附近有跟蹤不上目標的盲區。當目標從天線天頂附近通過時,所需的方位跟蹤角速度趨於無窮大,所以它只能跟蹤某一仰角以下的目標。如果需要過頂連續跟蹤,則須採用其他的型式。
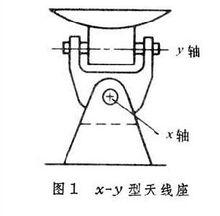
軸水平配置,軸與軸空間垂直並隨軸轉動,電軸與軸垂直(圖1)。它適用於跟蹤運動衛星、氣象衛星和宇宙飛船的地球站。因為衛星、飛船經過天頂時離地面距離最近,信號最強,所以要求地球站能夠過頂跟蹤接收,-型座架不像俯仰-方位型座架那樣會在天頂附近出現跟不上目標的現象;此外,每根軸只需轉動±90°,就能使波束掃掠整個空域。因此,它不需要高頻轉動鉸鏈和滑環,可以使用撓性波導和電纜。但是這種座架、軸均不與地面垂直。通常兩軸都需要加平衡重才能達到靜平衡,因而兩軸間距大,結構不緊湊,體積重量較大。
除了上述型式之外,還有--型三軸座架、三腳支撐座架等。隨著衛星通信技術的發展,還出現了各種方向有限可控的簡易座架。
設計 設計的基本要求是:保證天線的活動範圍;有足夠的角速度和角加速度;滿足跟蹤測量的精度要求;座架結構應有足夠的剛度和強度,在規定的環境條件下能安全、精確地工作。對於高精度天線座的設計,為了保證伺服系統的精度和動態性能指標,除這些要求外還要求轉動慣量小、結構固有頻率高、間隙小、摩擦和摩擦起伏小、慢動性好。同時,在各種氣候條件下要求尺寸穩定和軸系精度高。為此,須對天線座架結構進行靜力和動力分析計算。天線座架的設計包括結構型式和驅動方式的選擇,支承轉動裝置、驅動裝置、軸位檢測裝置、平衡裝置、滑環,以及安全保護裝置的設計。其中影響度的關鍵部件是支承轉動裝置、驅動裝置和軸位檢測裝置。
對於俯仰-方位型天線座是指方位軸的鉛垂度;俯仰軸與方位軸的垂直度;以及電軸與俯仰軸的垂直度。測量目標的角位置是通過俯仰軸和方位軸的軸位檢測裝置輸出的。如果方位軸、俯仰軸和電軸互不垂直,軸位檢測裝置輸出的就不是真實的方位角和俯仰角,就會產生測角誤差。影響軸系精度的因素主要是軸承的晃動、座架的製造誤差、調整誤差和結構變形等。
由天線座架、驅動系統和基礎組合成一個複雜的彈性系統,具有一定的固有頻率。當外界干擾力(如陣風、驅動力矩、振動、顛簸等)的頻率接近或等於系統的固有頻率時,系統便會發生諧振。對於伺服驅動的天線系統,如果結構固有頻率接近或者落入伺服系統的頻寬之內,伺服噪聲也會激發系統而發生諧振,使系統不穩定而無法工作,甚至造成天線系統的損傷和毀壞。為了保證伺服系統的穩定性並有足夠的穩定裕度,通常要求結構固有頻率為伺服頻寬的3~5倍。隨著天線直徑的增大,這種矛盾更為突出。因此,結構諧振問題越來越受到人們的重視。在結構設計時應對天線系統進行動力分析,儘可能使結構固有頻率避開各種干擾頻率,高於伺服頻寬;另外,也可以從機械和伺服兩方面採取措施抑制諧振峰。
艦艇在航行中會發生縱搖、橫搖、升沉和航向的變化,其中影響最大的是橫搖和縱搖。艦艇連同天線座和天線波束一起縱橫搖擺,就會影響雷達的搜尋區域、捕捉目標的機率、作用距離和測量定位精度。為了消除艦艇縱搖和橫搖的影響,通常將天線座裝在穩定平台上。穩定平台有兩根軸,橫搖軸與艦的首尾線平行,縱搖軸與艦的首尾線垂直。在縱搖軸和橫搖軸上各有一套軸位感測器和伺服驅動系統。在艦艇上裝有方位水平儀,它也有縱搖、橫搖兩根軸和兩套軸位感測器。利用高速陀螺的慣性,使方位水平儀的平台不隨艦艇搖擺,而始終保持穩定的水平基準。當艦艇發生縱搖、橫搖時,高速陀螺的慣性使方位水平儀的縱、橫搖軸軸位感測器產生搖擺信號,與天線座穩定平台縱、橫搖軸軸位感測器的信號進行比較,得出誤差信號,經過放大加給伺服驅動系統,使穩定平台的縱搖軸、橫搖軸跟隨方位水平儀的縱搖軸、橫搖軸轉動,使天線座穩定平台始終保持水平。
採用穩定平台能夠比較徹底地解決基座穩定問題,可以消除艦艇搖擺的影響,實現“波束穩定”。但是,對於俯仰-方位型天線座附加穩定平台的縱搖軸和橫搖軸,構成四軸穩定基座(圖3)需要四套伺服驅動系統,因而增加天線座的重量和結構的複雜性。為了減輕重量和簡化結構,有的艦用雷達只有橫搖穩定系統(圖4)。因為艦艇橫搖大於縱搖,只要穩定橫搖,與非穩定基座相比也可以改善性能,增大作用距離。
有的艦用雷達天線座,既沒有縱搖軸,也不用橫搖軸,只有俯仰軸和方位軸。艦艇的縱搖和橫搖角信號可以利用計算機進行實時的坐標變換,並由俯仰軸和方位軸的轉角來補償,稱為兩軸穩定。兩軸穩定在結構上比較簡單,只有兩根轉軸,只需要兩套伺服驅動系統,就能使波束中心指向空間的任意位置,實現“瞄準線穩定”。但是,在伺服系統和結構設計上又有一些新的問題。因為除了目標運動之外,還附加了艦艇的搖擺運動,常規的伺服系統可能跟蹤能力不夠,必須提高伺服系統的性能,為此所採用的基本方法是速度補償。
