
跟蹤雷達
正文
能連續跟蹤一個目標並測量目標坐標的雷達。它還能提供目標的運動軌跡。跟蹤雷達一般由距離跟蹤支路、方位角跟蹤支路和仰角跟蹤支路組成。它們各自完成對目標的距離、方位和仰角的自動跟蹤,並連續測量目標的距離、方位和仰角。相干脈衝都卜勒跟蹤雷達還具有都卜勒頻率跟蹤的能力,並能測量目標的徑向速度。跟蹤雷達對目標方位、仰角的自動跟蹤,就是雷達天線追隨目標運動而連續地改變其指向,使天線電軸始終指向目標。實現這一追隨過程,需要在雷達和目標之間建立閉環反饋控制。當雷達自動跟蹤一個目標時,某一瞬時因目標運動到一個新的位置而偏離了天線電軸指向,便在目標與天線電軸指向之間產生一個夾角,稱為角誤差。角誤差使天線系統有誤差信號輸出,接收機對誤差信號進行放大和變換後送到天線的方位、仰角驅動動大器的輸入端,經功率放大後控制方位、仰角驅動電機,改變天線電軸指向,使天線電軸重新瞄準目標。這就是雷達對目標的角坐標自動跟蹤過程,包括角誤差信息提取、誤差信號處理和對天線電軸指向的控制。跟蹤雷達因角誤差信息提取方法不同而形成幾種不同的測角體制或類型。
距離自動跟蹤是基於比較目標回波脈衝與測距波門之間的時間差(時間差與距離差有嚴格的對應關係)的原理。比較出時間差,就可以控制測距波門移動到目標回波距離上,即完成對目標的距離跟蹤。
發展過程 跟蹤雷達起源於對火炮瞄準控制的需要。最早用於火炮瞄準的雷達,是1938年美國陸軍通信隊研製的手控跟蹤雷達SCR-268,它採用波束轉換法測角,角度測量誤差約為 1°。這種雷達一直使用到第二次世界大戰的後期。1944年,美國的新型微波炮瞄自動跟蹤雷達SCR-584投入使用,採用圓錐掃描測角體制,角跟蹤誤差(均方根)約 2密位。提高角跟蹤精度是研究跟蹤雷達的主要課題。早在1940年,美國海軍實驗室已開始研究一種新的測角體制──同時波瓣法,後來稱為單脈衝法。單脈衝法能在一個回波脈衝里完全確定目標的角位置,也可消除目標反射截面積變化所引起的測角誤差。1947~1948年,在地面飛彈和機載火炮控制中已開始使用單脈衝法跟蹤雷達。但是,具有代表性的單脈衝精密跟蹤雷達卻是1956年美國無線電公司研製的靶場測量雷達AN/FPS-16,其角跟蹤誤差(均方根)為0.1~0.2密位。60年代末期,一些國家開始研究同軸跟蹤技術。同軸跟蹤技術採用準確的靜態、動態標定,先進的數據處理方法和自適應跟蹤技術來提高雷達的測量精度。1980年,美國在夸賈林靶場建成再入多站測量系統,把再入測量的位置精度提高到優於4米,三維都卜勒測速精度優於0.1米/秒。
中國的跟蹤雷達技術的發展大體上分為兩個階段。在50年代仿製圓錐掃描體制的炮瞄雷達、機載截擊雷達等;50年代末期開始單脈衝技術的研究。1960~1961年間研製出第一個微波複合比較器,對單脈衝天線的實現起了推動作用。1963年研製成功第一部單脈衝體制試驗雷達,隨後陸續研製出各種用途的單脈衝跟蹤雷達。
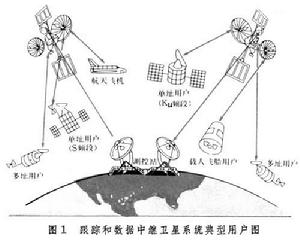
跟蹤雷達的套用日益廣泛。不僅用於各種火炮控制、飛彈制導、外彈道測量、衛星跟蹤、突防技術研究等軍事部門;而且,在氣象、交通、科學研究等領域的套用也日益擴大。
類型 跟蹤雷達的類型按測角體制劃分,主要有波束轉換法、圓錐掃描法和單脈衝法等三種,它們的主要區別是角誤差信息的提取方法不同。
 跟蹤雷達
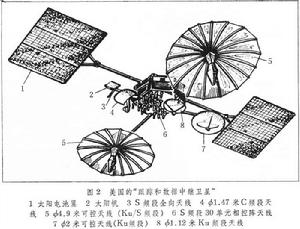
跟蹤雷達②圓錐掃描法:產生一個連續鏇轉的掃描波束來提取目標的角誤差信息。這個掃描波束的最大值方向與鏇轉軸之間有固定的夾角。波束中心線(最大值方向)的掃描軌跡為一圓錐面,因而稱為圓錐掃描。如果目標位置偏離鏇轉軸(天線電軸),接收的回波信號幅度就受波束掃描調製,形成調幅的誤差信號。調製頻率為圓錐掃描頻率,調製度的大小與角誤差成正比,相位由目標偏離方向決定。因此,波束掃描時形成的調幅誤差信號包含了目標角誤差的全部信息。圓錐掃描跟蹤雷達(圖2)的天線輸出的誤差信號經接收機放大和檢波後,輸送到方位、仰角誤差相位檢波器,誤差相位檢波器的基準信號分別是頻率相同(圓錐掃描頻率)而相位正交的正弦、餘弦信號。相位檢波器的輸出即為方位、仰角誤差信號,經功率放大後控制天線鏇轉,使天線電軸指向朝著角誤差減小方向運動。自動增益控制電路的作用是完成誤差信號的歸一化,使誤差檢波器輸出的方位、仰角誤差信號的大小正比於目標的角誤差,與目標的距離和反射截面的大小無關。
 跟蹤雷達
跟蹤雷達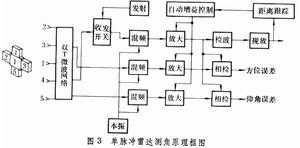 跟蹤雷達
跟蹤雷達距離自動跟蹤 跟蹤雷達中距離自動跟蹤幾乎都採用分裂波門法,其測距波門是一對前後毗鄰的波門。當目標回波信號的視頻脈衝中心與分裂波門中心不重合時,測距系統中的比較電路──時間鑑別器就有誤差信號輸出,控制分裂波門的時延,使分裂波門中心對準目標回波視頻脈衝中心。這時,分裂波門中心所對應的距離就是目標的距離。距離跟蹤系統按其物理結構形式分為機電式、電子模擬式和數字式。隨著數位技術的發展,數字式距離跟蹤系統越來越顯示出其優越性。
速度跟蹤 在跟蹤雷達中,速度跟蹤的原理和脈衝都卜勒雷達一樣,是檢測發射信號和目標回波信號之間的頻率差。速度跟蹤不僅能實時測量目標的徑向速度,而且可在距離、角度跟蹤支路進行相干積累處理,擴展雷達跟蹤距離,增加雷達的速度分辨能力。
參考書目
M.I.Skolnik, Introduction to Radar Systems,McGrawHill,New York,1962.
D. R. Rhodes,Introduction to Monopulse,McGrawHill.,New York,1959.
