
從理論到實用
 共軸雙旋翼直升機滑流示意圖
共軸雙旋翼直升機滑流示意圖共軸雙旋翼直升機具有繞同一理論軸線一正一反旋轉的上下兩副旋翼,由於轉向相反,兩副旋翼產生的扭矩在航向不變的飛行狀態下相互平衡,通過所謂的上下旋翼總距差動產生不平衡扭矩可實現航向操縱,共軸雙旋翼在直升機的飛行中,既是升力面又是縱橫向和航向的操縱面。
共軸雙旋翼直升機的上述特徵決定了它與傳統的單旋翼帶尾槳直升機相比有著自身的特點。20世紀40年代初,這種構形引起了航空愛好者極大的興趣,並試圖將其變成可實用的飛行器,然而,由於當時人們對共軸雙旋翼氣動特性認識的缺乏以及在結構設計方面遇到的困難,許多設計者最終放棄了努力,而在很長一段時間對共軸式直升機的探討只停留在實驗階段。1932 年,西科斯基研製成功了單旋翼帶尾槳直升機V S -300,成為世界上第一架可實用的直升機。從此,單旋翼帶尾槳直升機以其簡單、實用的操縱系統和相對成熟的單旋翼空氣動力學理論成為半個多世紀來世界直升機發展的主流。
然而,人們對共軸雙旋翼直升機的研究和研製一直沒有停止。
 蜂鳥式甲型單座直升機
蜂鳥式甲型單座直升機1944年,當時的第一飛機製造廠的總負責人朱家仁先生設計了中國第一架直升機:“蜂鳥式甲型單座直升機”。1945年秋,“蜂鳥式甲型單座直升機”研製成功,它是一架別國都沒有使用過的結構:共軸雙旋翼。值得一提的是,去了台灣的朱家仁在1955年8月研製成功CJC-3A縱列雙旋翼直升機,綽號“飛行香蕉” 。
俄羅斯卡莫夫設計局從1945 年研製成功卡-8 共軸式直升機到90年代研製成功被西方譽為現代世界最先進的武裝攻擊直升機卡-50 ;發展了一系列共軸雙旋翼直升機,在型號研製、理論實驗研究方面均走在世界前列。美國也於50 年代研製了QH-50 共軸式遙控直升機作為軍用反潛的飛行平台,並先後交付美國海軍700 多架。美國西科斯基公司在70 年代發展了一種前行槳葉方案(A B C)直升機,該機採用共軸式旋翼,剛性槳轂,上下旋翼的間距較小。它利用上下兩旋翼的前行槳葉邊左右對稱來克服單旋翼在前飛時由於後行槳葉失速帶來的升力不平衡力矩,從而提高旋翼的升力和前進比,其驗證機X H -59A 於1973 年進行試飛,並先後進行大量的風洞實驗。
從20 世紀60 年代開始,由於軍事上的需要,一些國家開始研製無人駕駛直升機。近年來,無人直升機已成為國內外航空領域內的研究熱點。比較成熟的有:加拿大的CLL227,德國的“Seamos”, 美國的“QH50”。這些無人直升機的共同特點是均採用了共軸雙旋翼形式。
在實驗方面,從20 世紀50 年代起,美國、日本、俄羅斯等相繼對共軸雙旋翼的氣動特性、旋翼間的氣動干擾進行了大量風洞實驗研究。經過半個多世紀的發展,共軸雙旋翼的旋翼理論得到不斷的發展和完善,這種構形的直升機以它固有的優勢越來越受到業內人士的重視。
北京航空航天大學於上世紀80年代開始研製共軸式直升機,並先後研製了“海鷗”共軸式無人直升機、M16 單座共軸式直升機、M22、FH -1 小型共軸式無人直升機。其中FH -1 小型共軸式無人直升機已在電力部門、科研院所等單位套用。該機目前已實現了從起飛到降落的無人駕駛自主飛行,可載20k g 任務載荷,飛行1.5h。
總體結構特點
共軸式直升機與單旋翼帶尾槳直升機的主要區別是採用上下共軸反轉的兩組旋翼用來平衡旋翼扭矩,不需尾槳。在結構上,由於採用兩副旋翼,與相同重量的單旋翼直升機相比,若採用相同的槳盤載荷,其旋翼半徑僅為單旋翼直升機的70%。單旋翼直升機的尾槳部分必須超出旋翼旋轉面,尾槳直徑約為主旋翼的16% ~ 22%,這樣,假設尾槳緊鄰旋翼槳盤,則單旋翼直升機旋翼槳盤的最前端到尾槳槳盤的最後端是旋翼直徑的1.16 ~ 1.22倍。由於沒有尾槳,共軸式直升機的機身部分一般情況下均在槳盤面積之內,其機體總的縱向尺寸就是槳盤直徑。這樣,在槳盤載荷、發動機和相同的總重下,共軸雙旋翼直升機的總體縱向尺寸僅為單旋翼直升機的60% 左右。
共軸式直升機的機身較短,同時其結構重量和載重均集中在直升機的重心處,因而減少了直升機的俯仰和偏航的轉動慣量。
在10t 級直升機上,共軸式直升機的俯仰轉動慣量大約是單旋翼直升機的一半,因此,共軸式直升機可提供更大的俯仰和橫滾操縱力矩。並使直升機具有較高的加速特性。
由於沒有尾槳,共軸式直升機消除了單旋翼直升機存在的尾槳故障隱患和在飛行中因尾梁的振動和變形引起的尾槳傳動機構的故障隱患,從而提高了直升機的生存率。
由於採用上下兩副旋翼,增加了直升機的垂向尺寸,兩副旋翼的槳轂和操縱機構均暴露在機身外。兩副旋翼的間距與旋翼直徑成一定的比例,以保證飛行中上下旋翼由於操縱和陣風引起的極限揮舞不會相碰。兩旋翼間的非流線不規則的槳轂和操縱系統部分增加了直升機的廢阻面積,因而,共軸式直升機的廢阻功率一般來說大於單旋翼帶尾槳直升機的廢阻功率。
共軸式直升機一般採用雙垂尾以增加直升機的航向操縱性和穩定性。
一般來說,共軸式直升機繞旋翼軸的轉動慣量大大小於單旋翼帶尾槳直升機,因而,航向的操縱性好於單旋翼帶尾槳直升機,而穩定性相對較差;由於共軸式直升機的機身較短,故增加平尾面積和採用雙垂尾來提高直升機的縱向和航向穩定性。共軸式直升機的垂尾的航向操縱效率只在飛行速度較大時方起作用。
主要氣動特性
共軸式直升機具有合理的功率消耗(無用於平衡反扭矩的尾槳功率消耗),優良的操縱性、較小的總體尺寸等特點。與單旋翼帶尾槳直升機相比,共軸式直升機的主要氣動特點為:共軸式直升機具有較高的懸停效率;沒有用於平衡反扭矩的尾槳功率損耗;尾槳在起飛、懸停狀態下的功率消耗為7% ~ 12%;空氣動力對稱;具有較大的俯仰、橫滾控制力矩。共軸式雙旋翼之間產生的氣動干擾,主要表現為上下旋翼尾渦的相互影響。
據卡莫夫設計局資料稱,通常共軸雙旋翼直升機的懸停效率要比單旋翼帶尾槳直升機高出17% ~ 30%。由於上述的原因,在相同的起飛重量、發動機功率和旋翼直徑下,共軸式直升機有著更高的懸停升限和爬升率。
共軸式直升機的另一個重要特性是隨著升限增高,其航向轉彎速度保持不變甚至有所增加。這是由於共軸式直升機不需要額外的功率用於航向操縱,因而改善了航向的操縱效率。增加同樣的拉力所需的扭矩增量隨懸停高度的增加而增加,因此,對單旋翼直升機來說,為平衡反扭矩所需的尾槳功率也需要增加,在尾槳功率供應不足的情況下使航向操縱效率減小。而共軸式直升機不存在這樣的問題。
共軸雙旋翼的平飛氣動特性與單旋翼也有不同,資料表明,在相同拉力和旋翼直徑下,剛性共軸雙旋翼的誘導阻力比單旋翼低20% ~ 30%。
由於操縱系統部分和上下旋翼槳轂這些非流線形狀部件的數量和體積大於單旋翼直升機並暴露在氣流中,因而共軸式直升機的廢阻面積大於單旋翼直升機。共軸式直升機在懸停、中低速飛行時的需用功率小於單旋翼直升機,隨速度增加,需用功率逐漸增大至大於單旋翼直升機,這一特性決定了共軸式直升機有較大的實用升限、較大的爬升速度、更大的續航時間。而單旋翼直升機則有較大的平飛速度、較大的巡航速度和飛行範圍。由於共軸式直升機具有特殊的操縱系統構件,兩旋翼必須保持一定的間距,因此要將廢阻面積降低到單旋翼直升機的水平很困難。
共軸式直升機在各種飛行狀態下均不同程度地存在著氣動干擾,表現為上旋翼對下旋翼的下洗流的影響以及下旋翼對上旋翼的流態的影響,實驗和理論研究表明,在懸停和小速度前飛狀態下,旋翼的相互影響使得下旋翼的下洗速度比單旋翼的要大得多,而上旋翼的下洗速度與單旋翼幾乎相同,略大一些。上旋翼的滑流流管在下旋翼處收縮至Rs(Rs<R),即下槳盤只在半徑Rs以內的區域受到上旋翼下洗流的影響,而上槳盤完全處於受下槳盤作用的滑流里。在垂直爬升時,由於上下旋翼的氣動干擾,每組旋翼的軸向速度包括直升機的爬升速度、自身誘導速度和來自另一旋翼的誘導干擾速度。
操縱系統
綜述
共軸式直升機與傳統單旋翼帶尾槳直升機的主要區別之一是航向操縱的形式和回響不同,其改變上下旋翼的扭矩的方式又分為:全差動、半差動、槳尖制動、磁粉制動。全差動方式是同時反向改變上下旋翼的槳葉角來實現直升機航向的操縱和穩定,俄羅斯卡莫夫系列共軸式直升機均採用此種控制方式。槳尖制動方式是在旋翼槳尖設定阻力板,通過改變阻力板的迎風阻力面積改變旋翼的扭矩以實現直升機的航向操縱和穩定,德國研製的無人駕駛直升機SEAMOS 採用了此種控制方式。磁粉制動是通過傳統系統內部的磁粉離合器對上下旋翼軸進行扭矩分配,加拿大研製的無人直升機C L L227採用了此種形式。半差動方式一般是通過改變下旋翼槳葉角改變上下旋翼的功率分配,使其相等或不等來控制直升機的航向。
根據直升機的飛行原理可知,直升機的飛行控制是通過周期變距改變旋翼的槳盤錐體從而改變旋翼的總升力矢量來實現的,由於旋翼的氣動輸入(即周期變距)與旋翼的最大回響(即揮舞),其方位角相差90°,當旋翼在靜止氣流中旋轉時,以縱向周期變距為例,上旋翼在90°時即前行槳葉處得到縱向周期變距輸入,此時上旋翼為逆時針旋轉,對上旋翼來說將在180°時得到最大回響,即揮舞最大。而對下旋翼而言,上旋翼的前行槳葉方位處是下旋翼的後行槳葉方位,此時下旋翼為順時針旋轉,其槳葉前緣正好與上旋翼相反,對上旋翼的最大輸入恰好是對下旋翼的最小輸入,下旋翼將在0°處達到最小揮舞回響。而在下旋翼的前行槳葉處(上旋翼的後行槳葉)達到最大輸入,在180°處達到最大揮舞。因此,上下旋翼在縱向周期變距的操縱下的揮舞平面是基本平行的。類似的在給出橫向周期變距操縱後,在上下旋翼的方位角0°、180°處對上下旋翼均給出同樣的操縱輸入,但由於兩旋翼的轉向相反,翼剖面的前後緣反向,因而,一個是最大輸入對另一個是最小輸入,兩旋翼的最大回響和最小回響相差180°,其揮舞平面也是平行的。因此,共軸式直升機的上下旋翼的自動傾斜器是通過若干拉桿組成連桿機構,該機構使得上下旋翼的自動傾斜器始終保持平行。
直升機的兩種典型的航向操縱結構形式即半差動和全差動形式。
半差動航向
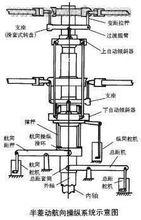 半差動航向操縱系統示意圖
半差動航向操縱系統示意圖目前國內研製的共軸式直升機採用的是半差動航向操縱形式,總距、航向舵機固聯在主減速器殼體上,縱橫向舵機固聯在總距套筒上,隨其上下運動。舵機輸出量通過拉桿搖臂、上下傾斜器和過渡搖臂變距拉桿傳到旋翼上,使其轉過相應的槳距角,以實現操縱的目的。
上下槳葉通過槳轂分別與內外轉軸固聯。在外軸的外面軸套上套總距套筒,其上又套航向操縱滑環、滑套式轉盤和下傾斜器內環,它們之間可沿軸向相對上下滑動,但不能轉動。上傾斜器內環通過滑鍵與內軸相聯,它不僅可沿軸向上下相對運動,還隨內軸一起轉動。上下傾斜器外環通過扭力臂與上下槳葉同步轉動,並有根等長撐桿將它們相聯以實現使上下槳葉同步地偏轉相同的槳距角。上傾斜器與上旋翼間搖臂支座直接夾固在內軸上,隨內軸轉動。而下傾斜器與下旋翼間搖臂支座套在軸套上,半差動航向操縱時可上下滑動,其外環隨下旋翼一起轉動。
半差動航向操縱的過程為:航向舵機的輸出量通過航向槓桿帶動航向操縱滑環,使滑環沿總距套筒上下滑動,滑環經兩個撐桿帶動過渡搖臂的支座。鉸接在支座上的過渡搖臂藉助兩組推拉桿分別連線下傾斜器和下槳葉的變距搖臂。使下槳葉迎角變化,導致由下旋翼氣動力對機體所產生的反扭矩變化,此值就是航向操縱力矩。再根據該力矩的大小和符號,決定航向速率和轉彎方向,實現航向操縱的目的。
上述的半差動航向操縱方案的總距操縱是通過上下移動自動傾斜器來實現的,即總距操縱除了克服上下旋翼的鉸鏈力矩外,還要克服上下傾斜器、上下傾斜器連桿以及相關的套筒和零件的重量。因此,該半差動操縱系統機構比較適於小型共軸式直升機,因為,對於小型直升機來說,旋翼軸徑相對較小。各種操縱線系只能從軸外走,上下旋翼的自動傾斜器以及相關零件的重量也相對較輕,採用該方案相對較易實現。而對於大型共軸式直升機如卡-50 直升機,其連線上下旋翼的傳動系統、槳轂、操縱機構比人還高,要操縱如此巨大的機構上下移動是難以想像的。半差動方案只改變下旋翼總距,由此引起的垂向運動耦合較大。然而,通過總距補償完全可以解決問題。
全差動航向
共軸式直升機全差動航向操縱方案是指在航向操縱時大小相等方向相反地改變上下旋翼的總距從而使得直升機的合扭矩不平衡,機體產生航向操縱的力矩。由於在操縱時上下旋翼的總距總是一增一減,因此航向操縱與總升力變化的耦合小,即用於由於差動操縱引起的升力變化所需的總距補償較小。顯然,該方案可減輕駕駛員的操縱負擔。前蘇聯卡莫夫設計局研製的卡莫夫系列共軸式直升機均採用了此種方案。
該操縱機構分別在上旋翼軸內和下旋翼軸內設有可上下移動的套筒,該套筒隨旋翼軸同步轉動且可沿旋翼軸做上下相對運動。上下旋翼套筒在上下旋翼槳轂附近,套筒連線上下旋翼變距搖臂,變距搖臂在不同距離處與旋翼變距拉桿和自動傾斜器外環支桿鉸接形成槓桿搖臂,通過上下移動套筒實現變距運動。兩套筒的內部設有變距裝置,該裝置與設在主減速器底部的總距手柄和航向手柄相連,總距手柄通過垂直拉動變距裝置實現上下旋翼總距的同步增減,達到改變直升機升力的目的。航向手柄通過正反轉動變距裝置實現上下旋翼總距一增一減的運動,進而實現航向操縱。
由於操縱拉桿裝置設在軸內,使得整個外部操縱機構簡單、乾淨,上下自動傾斜器在軸向沒有運動。這種結構方案比較適合於大型直升機,因為軸的內徑相對較大,為安裝操縱裝置提供了較大的空間。而對於輕小型直升機,由於尺寸的限制,採用這樣的方案會有些困難。
傳動系統
共軸式直升機的傳動系統是將發動機的動力通過離合器、減速器傳遞給上旋翼軸和下旋翼軸,本文主要介紹比較典型的等轉速方案。
所謂等轉速方案是指上下旋翼通過齒輪換向並通過齒輪保持相同的減速比。
一般來說,共軸式直升機的上旋翼軸和下旋翼軸都是通過內外軸以實現共軸反轉。上下旋翼的內外軸又是通過主減速器內的圓錐齒輪實現換向運動的。因此,主減速器既是動力傳遞減速裝置又是上下旋翼的換向裝置。
對於軸系,一般至少應有上下旋翼軸和套筒三部分組成。上旋翼通過槳轂與內軸相連,內軸穿過與下旋翼連線的外軸,在與外軸的交匯處通過軸承隔開,在此,軸承一方面將內外軸的運動隔開,一方面使外軸對內軸在該點進行支撐。內軸在下端與下錐齒輪連線並通過軸承由減速器殼體支撐。套筒與減速器殼體固連並在下自動傾斜器處通過軸承對外軸支撐。外軸在下端與上錐齒輪通過平鍵或花鍵相連並通過軸承與減速器殼體連線。
由氣動分析可知,上旋翼在相同功率下的升力大於下旋翼,尤其是在懸停和低速飛行狀態,而上旋翼軸相對下旋翼軸又細又長,因此,存在上旋翼軸危險截面的彎扭組合應力遠大於下旋翼軸的嚴重情況。設計時應予以注意。
發展前景
 共軸雙旋翼直升機
共軸雙旋翼直升機直升機的垂直起降、空中懸停、自轉下滑的能力是在所有飛行器中效率最高、並無法代替的。但是,由於採用旋翼作為升力和推進系統,使得直升機的前飛速度受到限制。直升機的前飛速度的限制主要不是來自於發動機功率和機體的廢阻力。其最主要的原因是所謂的前行槳葉激波和後行槳葉失速。而首先限制直升機前飛速度的是後行槳葉失速。所謂前行槳葉指的是直升機在前飛中,旋翼旋轉的一側是順航向,其槳尖處相對槳葉前緣的速度是旋翼切向速度與直升機前飛速度的疊加。如該速度超過音速則產生激波,增加需用功率。後行槳葉失速則是指旋翼向後旋轉一側的槳葉前緣處是旋翼切向速度之差,在旋翼轉速一定時,前飛速度越大,該差越大,其槳葉前緣處的速度會越小。
近些年為提高直升機的飛行速度和航程,人們在尋找其他的方法,比較典型的是美國的X2 複合式直升機和俄羅斯的卡-92 複合式直升機。
這兩種飛行器的一個最明顯的特點都是採用了共軸雙旋翼的布局。X2 複合式直升機採用了共軸雙旋翼加短機翼和螺旋槳的形式。俄羅斯卡-92 複合式直升機則是共軸雙旋翼加共軸式螺旋槳形式。
這兩種飛行器的特點是,採用共軸雙旋翼作為垂直飛行時的升力系統,採用推力螺旋槳作為前飛時的推進系統,充分發揮了各自優勢,保持了共軸雙旋翼的高懸停效率和自轉下滑能力,以及螺旋槳的高效推進能力。
這種複合式直升機在前飛時螺旋槳和機翼所產生的升力為旋翼卸載,減小了旋翼拉力的前飛分量,從而緩解了前行槳葉激波和後行槳葉失速對飛行器的惡劣影響。由於採用了共軸雙旋翼,高速前飛所帶來的後行槳葉失速問題可由上下旋翼轉速相反,其後行槳葉所處位置相對機體對稱的特性而解決:一副旋翼產生的側傾力矩被另一副旋翼的側傾力矩平衡。因此,共軸雙旋翼反轉的對稱性,與傾轉旋翼的左右布置且反轉的對稱性相比,具有懸停效率高、保持自轉下滑能力、不需傾轉機構、安全性高的優勢。所需研究和解決的問題是在高速前飛中共軸雙旋翼的質量特性和氣動特性對機體的影響。
