
參見液體火箭助推器、公共核心助推器、太空飛行器推進、PEPCON事故
2 半規則變星(Semiregular Variable Star)的一種類型
參見半規則變星列表、變星命名
1 Solid Rocket Booster,固體火箭助推器

相比液體助推器,固體助推器的優勢就是推力更大,且不需要製冷隔熱設備。將固體助推器用於液體火箭芯級能減少液體燃料的使用,減輕火箭整體重量。固體助推器設計成本更低,生產和測試也更容易,但造價卻比相同推力的液體助推器高。
以阿麗亞娜四號為例,基本的40型可以將2,175Kg貨物送至地球轉移軌道,而44P型使用四個固體助推器,可將3,465 kg貨物送到相同高度。
固體助推器點燃之後就很難在燃料耗盡前停車,這對於載人太空飛行器發射來說是個風險因素。固體助推器的事故率大約是1%,且事故往往是災難性的。固體助推器還有一種潛在風險,就
無人和載人太空梭衍生運載器都計畫使用太空梭固體助推器的改進型,其中載人運載器將使用一枚增大型固體助推器作為其第一級。
圖1:德爾塔2號(藍色)上捆綁了兩枚固體助推器(白色)
太空梭固體助推器(以下簡稱SRB或助推器)是為太空梭在發射升空前兩分鐘內提供推力的一對固體火箭助推器,安裝在外儲箱兩側。每台助推器能產生1.8倍於F-1發動機的推力,F-1是推力最大的單室液體燃料火箭發動機,五台F-1驅動登月火箭土星五號。而SRB是推力最大的固體助推器,也是載人航天第一次使用固體助推器。被拋棄的SRB濺落大洋上,被打撈後灌注推進劑重新使用,可重用數次。SRB的主要承包商和藥柱生產商是位於猶他州百翰市的錫奧科爾公司。
概覽
SRB是最大的固體燃料火箭,也是第一次採用可重用設計的固體火箭。助推器高45米,直徑3.7米。在發射台上,每台助推器重589550 kg(1300000磅),兩台助推器占全部起飛質量的60%。而每台助推器中填充的推進劑重約498850 kg(1100000磅)。
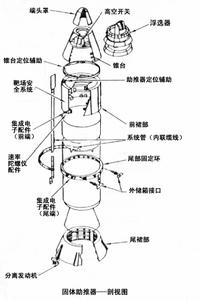
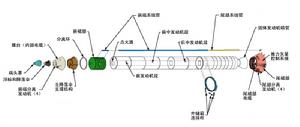
SRB的基本元件有發動機(含殼體,推進劑,點火器和噴管),主結構體,分離系統,飛行控制儀器,火工設備,減速系統,推力矢量控制器,回收系統,安全自毀系統。
每台助推器都通過SRB尾部的兩個橫向支桿和斜向連線桿與外儲箱相接,並且SRB前裙部與外儲箱前端相接。每台助推器尾部還通過四顆脆性螺母與發射台相接,起飛時螺母斷開。
助推器分為七部分有不同廠商製造然後在廠房中成對組裝,通過鐵路運到甘迺迪航天中心完成最後總裝。各段通過環形夾,掛鈎, 牽引鉤聯結銷緊固,再用三個“O形環”進行密封,最後塗上耐熱膩子。
組件
固定柱
每台助推器都有四個固定柱與發射台上的相應的支撐柱對應,固定螺栓將助推器與發射台連線起來。螺栓兩端都有螺母,而頂端螺母是脆性螺母,其中含有兩個NASA標準起爆器(NSD),將在固體發動機收到點火命令後起爆。隨後螺栓在NSD燃氣壓力,重力作用下向下滑出掉入裝滿沙的螺栓減速台。該螺栓長71厘米,直徑8.9厘米。而脆性螺母被吹風容器捕獲。如果固定失敗,SRB的推力足夠拉斷螺栓,釋放太空梭。SRB的點火命令是軌道器中的電腦發出的,信號經主事件控制器到移動發射台上的火工點火控制器(PIC)。發射前16秒,發射處理系統為PIC低壓供電,PIC使用低壓啟動起爆器。
電力分配
軌道器的主直流匯流排電源通過A,B,C三條SRB匯流排向SRB供電,分別對應主直流匯流排電源的A,B,C線。主直流匯流排電源的C線作為SRB的A,B匯流排的備用電源,B線作為SRB的C匯流排備用電源。如此電力分配設計可使所有SRB匯流排在軌道器其中一個匯流排失效時保持電力。公稱運行電壓是28±4V DC.
液壓系統
每台SRB都含有兩套自維持的獨立液壓動力系統(HPU),每個系統由輔助動力系統(APU),燃料供給模組,液壓泵,液壓儲油器和液壓液體管道集成組成。輔助動力系統由聯氨功能,通過機械軸驅動液壓泵,產生SRB液壓系統的液壓。兩套液壓動力系統和兩套液壓系統處於SRB尾部,位於噴管和尾裙部之間。液壓動力系統的組件安置在尾裙部,處於搖擺和傾斜傳動裝置之間。而控制電路模組置於尾部外儲箱連線環處的電子集成設備區。兩套系統在T+28秒開始工作,直至SRB與外儲箱和軌道器分離。液壓動力系統和其燃料系統是彼此分開的。每個燃料供給模組儲有10kg聯氨,壓力為2757.88 kPa(400psi)的氮氣擠壓聯氨進入燃料分配管。
輔助動力系統(APU)中,燃料泵給聯氨增壓並輸送至燃氣發生器。燃氣發生器在催化劑作用下將聯氨分解為高溫,高壓氣體。二級渦輪泵將氣壓變為機械動力,驅動變速箱。冷卻的低壓廢氣在排出前還流經燃氣發生器做冷卻之用。變速箱驅動燃料泵,自身潤滑泵,液壓動力系統的液壓泵。該系統不能自啟動,因此一根旁管向燃氣發生器輸送氮氣,直到輔助動力系統轉速過高,產生的出口壓力高過旁管。
APU轉速達到100%,APU主控制閥關閉,此後APU的轉速由控制電路控制。如果主控制閥出故障保持開放狀態,副控制閥將在APU達到112%轉速時起作用。APU的全速轉速為72,000 rpm,110%轉速為79,200 rpm,112%轉速為80,640 rpm。
SRB上的液壓動力系統與SRB的伺服傳動機構相連,一套系統為伺服傳動機構提供主動力,第二套作為副動力源。若主液壓系統壓力降至14100kPa,傳動機構由切換閥控制開啟副動力源。切換閥處於第二位置時,一個開關觸頭將關閉。若閥門關閉,APU控制器將收到信號,將APU設定為112%工作狀態。APU的全速工作能為一套APU/HPU提供足夠液壓。
液壓泵轉速為3,600 rpm,輸出液壓為21000±340kPa。高壓放泄閥當液壓超過25855kPa時打開,以保護液壓系統。
APU/HPU及液壓系統可重用20次。
推力矢量控制系統
每台SRB有兩套液壓萬向伺服傳動機:一套用於翻滾,一套用於傾斜。伺服傳動機為噴管的推力矢量控制提供動力。太空梭飛行控制系統中的上升推力矢量控制部分(ATVC)負責引導三台主發動機和兩台SRB的推力以在發射和上升段控制飛行高度和軌跡。來自製導系統的指令送到ATVC,ATVC按一定比例分給主發動機和SRB的伺服傳動機。四個獨立的飛行控制系統通道和四個ATVC通道控制六個主發動機驅動器和四個SRB的ATVC驅動器,一個驅動器負責一台伺服傳動機。
每個SRB伺服傳動機由四個獨立的二級伺服閥組成,伺服閥接受來自驅動器的信號。一個伺服閥控制一個傳動機,進而控制噴管朝向,確定推力方向。傳動機動力缸中感測器為推力矢量系統提供定位反饋信息。
每套傳動機的四個伺服閥還提供一套控制定位的“多數表決機制”,即四個伺服閥的信號一致才啟動,如果一個錯誤信號持續超過預定時間,壓差感測器激活選擇閥以隔離故障伺服閥的液壓。由其餘的伺服閥控制傳動機運動。
每個信號通道的故障監視器可以顯示哪個通道出問題,而隔離閥可以復位出故障的通道。
每套伺服傳動機還有濺落減載設備,使噴管的撓性軸承的濺落至海面時免受損傷。
速率陀螺儀配件
每台SRB有兩個速率陀螺儀集成(RGA),每個RGA含有一個傾斜和一個偏航陀螺儀。它們與軌道器的翻轉陀螺儀一同為軌道器電腦,制導導航系統和控制系統提供數據。SRB分離後,軌道器的陀螺儀集成繼續工作。陀螺儀集成信號通過尾部多路/多路分配器傳到軌道器通用控制系統。陀螺儀集成數據冗餘系統採用中值選擇方式。陀螺儀集成可重用20次。
推進劑
發動機推進劑由高氯酸銨(氧化劑,占69.6% 質量),鋁(燃料,16%),鐵氧化物(催化劑,0.4%),聚合物(如PBAN和HTPB,作粘合劑,次級燃料,12.04%),環氧樹脂(固化劑,1.96%)組成。這種推進劑亦稱高氯酸銨組合推進劑(APCP)。用這種推進劑海平面比沖為242秒,真空比沖268秒。主燃料是鋁,因為鋁比能為31.0MJ/kg,但是體積應變能密度也很高,難以意外引燃。
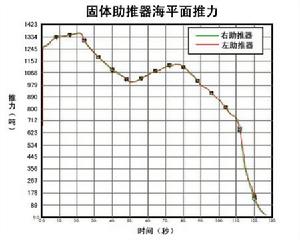
推進劑在前發動機段中是十一星形填料,在尾部和後罩部呈雙截錐形。如此填裝使發動機在離地時產生大推力,並在約50秒後推力漸減以避免太空梭在最大動壓(Max Q)期間過載。
工作過程
點火
軌道器電腦通過主事件控制器(MEC)向SRB上的安全發火機構,NASA標準起爆器發出點火指令。火工啟動控制器的一個單通道電容放電器控制各個火工設備的點火。火工啟動控制器必須同時收到三個信號才能點火,三個信號是:預備,點火1和點火2,它們源自軌道器通用計算機 (GPC),隨後送到MEC,MEC用28伏電壓將信號送到PIC。arm信號將PIC電容充電到40伏 DC。
通用計算機的發射序列也控制一部分主推進系統閥門,並監視主發動機的就緒狀態。機載計算機在T+6.6秒向主推進系統發出啟動指令(次第啟動三台主發動機,間隔0.25秒),隨後監視每台發動機的推力變化,三台主發動機必須在三秒內達到90%推力,否則會發出程式關機指令,並觸發安全措施。
正常情況下(推力達到90%)在T+3秒時,主發動機接到指令調整到噴管到起飛朝向,同時SRB接到點火1信號,太空梭基本彎曲載荷模式初始化(按外儲箱頂部為標準,朝向外儲箱方向移動65厘米(25.5英寸)。
點火2命令使多餘的標準起爆器起爆,從薄擋片上落入火焰管,由此點燃安全發火機構中的增壓火藥(pyro booster charge), 增壓火藥點燃點火啟動器中的炸藥,燃燒產物點燃固體發動機點火器,點火器瞬間點燃SRB垂直方向上全部推進劑表面。
在T時刻,兩台SRB在四台機載計算機發出的指令下點火,SRB上的爆炸螺栓觸發,機載主計時系統,事件計時器,任務時間計時器啟動,三台主發動機推力達到100%,地面發射序列結束。
發動機推力在最大動壓區域(Max Q)能調節減小,推進劑初始是星形填裝,隨後逐漸燃燒變成圓形外表面,表面積減小,因此推力減小。
分離
當固體發動機室壓感測器經過冗餘管理系統,中值選擇後,兩台SRB的首端室壓低於345kPa(50psi),SRB分離過程啟動。另有備份方案是比對點火至當前時刻所經歷的時間。分離過程啟動後,推力矢量系統控制傳動機移向零位,將主推進系統設為“第二級”模式(啟動0.8秒後)以確保兩台SRB推力都降至44噸以下。軌道器偏航姿態持續4秒,SRB推力降至27噸以下。分離指令由軌道器下達,SRB接到指令後在30毫秒內,起爆標準起爆器和分離發動機,與外儲箱分開。每台SRB的每一端都有四台分離發動機。
前附著點有一個球,與外儲箱的插口通過螺栓連線。螺栓兩端含有標準起爆器。尾部附著點有三部分組成:上桿,下桿和斜桿。每個支桿兩端都裝有標準起爆器。
安全自毀系統
安全自毀系統(RSS)是當太空梭失控後,由遠程遙控自毀全機或部分,以減少爆炸碎片,有毒物質等。目前安全自毀系統只使用過一次,即在挑戰者號解體37秒後。每台SRB有一套安全自毀系統,系統可接受由地面發出的兩條指令(預備和點火)。只有當太空梭越過發射軌跡紅線時,自毀系統才會使用。
自毀系統由兩個天線耦合器,指令接收/解碼機,雙分配器,安全發火機構(含兩個NASA標準起爆器),兩個引爆信管總管(CDF),七個CDF集成,一個線性火藥(LSC)。
天線耦合器為無線電頻率和地面支持設備指令提供適當阻抗。指令接收機調諧自毀指令頻率,將輸入信號送到分配器。指令解碼器保證只有正確的指令進入分配器。分配器也有保證指令正確的設備。
標準起爆器產生火花點燃CDF,進而點燃LSC引爆太空梭。安全發火機構在發射前和分離過程起到隔離標準起爆器和CDF的作用。
第一個預備信號,開啟自毀程式,點亮位於指令長和成員艙顯示和控制板上一盞燈。第二個信號就是點火指令。
SRB上的分配器是交叉相連的,如果一個SRB收到預備或者自毀信號,另一個SRB也將得到信號。
自毀系統電池為自毀A系統供電,回收電池為自毀B系統和回收系統供電。在SRB分離序列中,自毀系統電源關閉,回收系統得到供電。
降落和回收

回收序列從高空空壓開關運行開始,觸發端頭罩推力器,拋除端頭罩,放出引導傘。端頭罩分離預定高度4786米,約在SRB分離218秒後。直徑3.5米的引導傘拉動連線切割刀的系索,切斷減速傘的固定環帶。引導傘拉出減速傘包懸掛帶,使之從原位置展開。十二根長32米的懸掛帶伸開後,直徑16.5米的減速傘打開。減速傘可承受約143噸重量,自重544kg。

圖6:STS-114任務使用的SRB被回收運回卡納維拉爾角。
減速傘展開後,SRB呈尾端在下狀態。在預定高度1676米,SRB分離243秒後,低空空壓開關打開,錐台體分離,減速傘將錐台體拉離SRB。主傘懸索從位於錐台內展開,全長62米,接著三個主傘展開,一段時間延遲後,主傘收束繩斷開,主傘張開至原始尺寸。每個傘直徑45米,承重88噸,自重988kg。錐台體分離20秒後,噴管延伸部分離。
SRB分離279秒後,以23m/s的速度濺落海面。濺落點約離佛羅里達州東海岸240公里(130海里)。由於SRB是噴管先入水,空氣已充滿內部,使得SRB漂浮,前端露出水面9米。
目前的設計是保留主傘至濺落。鹽水活化釋放設備(SWAR)集成到主傘總力管中,以簡化回收工作,並減小對SRB的損傷。
特別打造的NASA回收船,Freedom Star和Liberty Star,前往回收SRB及相關設備。助推器被定位後,潛水員將潛水運作設備(DOP)放入噴管中,向發動機殼體內注入空氣,使SRB變為水平漂浮以便拖運。隨後回收船將SRB及其它組件拖回甘迺迪航天中心。
挑戰者號事故

此外,專門的結構測試發現固定柱與尾裙部的連線焊接存在問題,因此尾裙部的尾環增加了加強梁。
兩處改動使每台SRB增重204 kg(450磅),新助推器名為“重設計固體火箭發動機”(RSRM)。
圖7:挑戰者號執行STS-51-L任務前,相機捕捉到煙從右側SRB冒出。
製造商
SRB的主承包商是錫奧科爾公司位於百翰市的沃薩奇分部。聯合太空聯盟的固體火箭助推器元件分部負責SRB的集成總裝,檢驗。其他為SRB提供組件的公司有:派克-比爾安達公司--卡拉馬祖 (密西根州) (液壓泵)
噴氣飛機公司--雷德蒙德 (華盛頓州) (聯氨燃氣發生器)
Arde公司--莫瓦 (新澤西州) (聯氨供給模組)
Arkwin工業公司--韋斯特伯里 (紐約州) (液壓容器)
艾登塞矢量分部--新鎮 (賓夕法尼亞州) (集成電子設備)
邦迪克斯公司--泰特波羅 (新澤西州) (集成電子設備)
綜合控制設備公司--艾爾塞貢度 (加利福尼亞州) (聯氨)
Eldec公司--林伍德 (華盛頓州) (集成電子設備)
爆破技術公司--費爾菲爾德 (加利福尼亞州) (約束起爆引信總管)
Gaco Western--西雅圖 (華盛頓州) (Hypalon塗料)
洛克希德·馬丁公司--丹佛 (科羅拉多州) (陀螺儀啟動控制器)
穆格公司--東歐羅拉 (紐約州) (伺服傳動機構,燃料隔離閥)
摩托羅拉公司--斯科茨代爾 (亞利桑那州) (安全自毀接收機)
先鋒降落傘公司--曼徹斯特 (康乃狄克州) (降落傘)
斯佩里蘭德飛行系統公司--菲尼克斯 (亞利桑那州) (多路器 / 多路分配器)
特利丹公司--劉易斯堡 (田納西州) (定位輔助發射機)
ATK發射系統公司--百翰市 (猶他州) (分離發動機)
漢勝公司--羅克福德 (伊利諾伊斯州) (輔助動力系統)
VACCO工業公司--艾爾蒙特 (加利福尼亞州) (安全發火機構)
Voss工業公司--克里夫蘭 (俄亥俄州) (SRB固定帶)
先進固體助推器
NASA曾計畫在自己的工廠製造新的先進固體助推器(ASRB)來取代“挑戰者號”之後的太空梭所用助推器。ASRB將能產生額外推力來增加太空梭載荷,以便能運送組件到國際空間站。在花費了20億美元之後,該項目被取消,而“超輕型外儲箱”替換之前發射時掛載的“輕型外儲箱”。現在ASRB的外殼和“開路者號”一起陳列在位於亨茨維爾的美國太空和火箭中心。纖維纏繞殼體
為了在范登堡空軍基地的SLC-6發射台上講太空梭送入極軌道,SRB採用更輕的纖維纏繞殼體(FWC)代替甘迺迪航天中心發射時用的鋼製殼體。與常規SRB採用了曾導致挑戰者號事故的有缺陷的安裝接頭設計不同,纖維纏繞殼體采助推器採用雙尾("double tang")連線設計(可在主發動機點火離地前的震動中使助推器保持相對位置不變),但仍使用兩個O形密封環。五段式助推器
在2003年“哥倫比亞號”事故之前,NASA曾考慮過將現有的四段式發動機換成五段式助推器,或者換成採用宇宙神五號或德爾塔四號技術的"flyback"液體助推器。採用五段式設計對現有太空梭結構改動小,但能增加9,100 kg (20,000 磅 )有效載荷到國際空間站的傾斜軌道,並且消除了執行“太空梭異常模式”的危險,甚至可以在太平洋上空採用“雙向曲折機動”飛往極軌道。哥倫比亞事件之後,NASA擱置了五段式助推器研發,而為了星座計畫中的戰神一號和戰神五號又復興了此計畫。未來套用
NASA計畫將SRB的設計和基本結構用於戰神系列火箭。2005年,NASA宣布太空梭衍生運載器將用於運送獵戶座飛船至近地軌道,隨後送往月球。而SRB衍生的運載器名為戰神一號。原計畫採用原先的四段式發動機作為第一級,第二級使用一台液體發動機。2006年提出並改進至今的計畫是採用五段式發動機做第一級,第二級採用阿波羅計畫的產物J-2發動機的衍生品J-2X發動機。為安置SRB原先的端頭罩部分,戰神一號使用一段錐形間級來間接第一級和第二級。同時將採用更大更重的降落傘以便回收。重型運載火箭戰神五號的原設計方案是第一級採用五台SSME發動機和一對五段式發動機為助推器。當前設計是採用六台RS-68B發動機和一對5.5段式助推器(類似已退役的大力神34-D火箭配置)。重新設計後的戰神五號將比土星五號,N1火箭,能源號火箭更長,推力更大。雖然目前關於助推器的回收和重用還有沒有最終方案,但很可能採用和太空梭時代相同的過程。因為用於戰神五號的助推器其飛行軌跡和太空梭助推器幾乎相同。
DIRECT計畫使用的運載器與戰神系列不同,將在德爾塔四號衍生火箭上採用一對原始四段式發動機配合RS-68發動機。
2 半規則變星的一種類型
類型
參見半規則變星列表、變星命名【中文詞條】半規則變星
【外文詞條】semi-regular variable star
【作??者】李競
脈動變星的一類﹐分為紅半規則變星﹑黃半規則變星和金牛座RV型變星三個次型。它們的光變曲線外形和光變周期均呈現很大的不規則性﹐平均亮度恆定或有長周期變化。半規則變星的周期大約從幾十天乃至若干年。總光變幅可達3~4個星等﹐通常多為1~2個星等。半規則變星是晚型的巨星或超巨星﹐光譜型從F型到S型均有。金牛座RV型變星﹑黃半規則變星和紅半規則變星三者的光譜型依次更晚(見恆星光譜分類)﹐平均光度也依次減弱。光譜型隨光度變化而變化﹕在亮度極小時刻﹐有的出現氧化鈦吸收帶﹔在增亮階段出現氫或矽發射線。金牛座RV型變星屬星類Ⅱ﹐分布在銀心和銀暈中﹐在球狀星團中也有一些。黃半規則變星和紅半規則變星主要屬星族Ⅰ﹐是銀河系鏇臂上的成員。在赫羅圖上﹐半規則變星分布在巨星分支附近。金牛座RV型變星緊靠星族Ⅱ造父變星-室女座W型變星的右上方﹐絕對星等大致在-5~-7等之間。紅半規則變星在金牛座RV型變星的右下方﹐絕對星等大致在-2~-5等之間。
半規則變星
半規則變星是光譜類型為中期和晚期的紅巨星或超巨星,顯示出可以觀察到的周期性和光度變化,但有著各種各樣的不規則性或中斷的變化。變光周期從20天至超過2000天不等,同時光度曲線在每個周期內或多或少的都有一些變化。光度的變化範圍從數百至數星等 (通常在可見光的範圍是1-2星等)。半規則變星可以分為幾種類型:
SRA:光譜類型 (M、C、S或Me、Ce、Se) 的巨星,有確定的周期和較小的變光幅度,通常在可見光的變化低於2.5等,墳墓一 (寶瓶座 ζ)是這一類型的例子。振幅和光度曲線的形狀經常會改變,周期的範圍在35添置1200天之間。許多這一類型的變星羽米拉變星的差別只是光度變化的幅度較小。
SRB:光譜類型 (M、C、S或Me、Ce、Se) 的巨星但周期特性難以確認 (許多的周期都在20至2300天之間)或是有著緩慢不規則變化的交替性周期,有些還會偶爾或一度完全停止變化。北冕座 RR和天鵝座 AF是有這種行為的例子。這種類型的每一顆恆星通常都會有一個平均周期,會有兩個或多個有稍許不同的周期同時被觀察到。
SRC:光譜類型 (M、C、S或Me、Ce、Se)的超巨星,光度的變化大約在1等,周期則從30天至數千天。造父四 (仙王座 μ) 是這類型中明顯的例子。
SRD:光譜類型F、G、或K的巨星和超巨星,有些在光譜中會有發射譜線。
光度變化的振幅範圍在0.1至4等,而周期從30天至1100天。武仙座 SX和大熊座 SV是這種類型的例子。業餘的觀測者可以在M 13觀察到一打左右光度在11.95至12.25等的紅色變星,而周期在43天(V24)至97天(V43)之間。
3 計算機
通信: SRB:signalling radio bearer信令無線承載計算機: srb:流請求塊 Streaming Request Block的簡稱
