積分飽和的定義
積分飽和 [英] Integral windup / integral saturation
如果執行機構已經到極限位置,仍然不能消除偏差時,由於積分作用,儘管PID差分方程式所得的運算結果繼續增大或減小,但執行機構已無相應的動作,這就叫積分飽和。
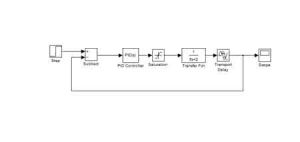 圖
圖積分飽和的產生
1、當偏差產生躍變時,位置型PID算式的輸出將急劇增大或減小,有可能超過執行機構的上(下)限,而此時執行機構只能工作在上限。
2、系統輸出需要很長時間才達到給定值,在這段時間內算式的積分項將產生一個很大的積累值。
3、當系統輸出超過給定值後,偏差反向,但由於大的積分積累值,控制量需要相當一段時間脫離飽和區。因此引起系統產生大幅度超調,系統不穩定。
所謂積分飽和現象是指若系統存在一個方向的 偏差,PID控制器的輸出由於積分作用的不斷累加而加大,從而導致u(k)達到極限位置。此後若控制器輸出繼續增大,u(k)也不會再增大,即系統輸出超出正常運行範圍而進入了飽和區。一旦出現反向 偏差,u(k)逐漸從飽和區退出。進入飽和區愈深則退飽和時間愈長。此段時間內,執行機構仍停留在極限位置而不能隨著 偏差反向立即做出相應的改變,這時系統就像失去控制一樣,造成控制性能惡化。這種現象稱為積分飽和現象或積分失控現象。
條件
積分飽和產生的條件
1、調節器長期處於開環狀態
2、調節器具有積分控制作用
3、調節器輸入偏差長期得不到校正
常用的改進方法
 防飽和機制
防飽和機制1.積分分離法
2.變速積分 PID 控制算法
3.超限削弱積分法
4.有效偏差法
5.抗積分飽和機制
遇限削弱積分法
基本思路:在計算P(k)時,根據上一時刻的控制量P(k-1)是否超過限制範圍,若超出則根據偏差決定是否累計積分項(若未進入超調區域則不累計積分項,否則開始累計積分項)。
有效偏差法
基本思路:當位置型PID算式的控制輸出超過限制範圍時,控制量只能取邊界值。有效偏差法的實質是將相當於邊界控制量的偏差值作為有效偏差值進行積分。
