 左手坐標系
左手坐標系定義
存在兩種完全不同的3D坐標系。
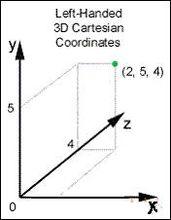
伸出左手,讓拇指和食指成“L”形,大拇指向右,食指向上。其餘的手指指向前方,這樣就建立了一個左手坐標系。其中,拇指、食指和其餘手指分別代表x,y,z軸的正方向 。
判斷方法:在空間直角坐標系中,伸出左手,讓左手的拇指方向指向x軸的正方向,食指方向指向y軸的正方向,如果中指方向能夠指向z軸的正方向,那么稱這個坐標係為左手直角坐標系,反之則是右手直角坐標系。
相關坐標系
空間直角坐標系
過定點O,作三條互相垂直的數軸,它們都以O為原點且一般具有相同的長度單位.這三條軸分別叫做x軸(橫軸)、y軸(縱軸)、z軸(豎軸);統稱坐標軸.通常把x軸和y軸配置在水平面上,而z軸則是鉛垂線,這樣的三條坐標軸就組成了一個空間直角坐標系,點O叫做坐標原點 。
笛卡爾坐標系
3D數學講解如何在3D空間中精確度量位置、距離和角度,其中使用最廣泛的度量體系是笛卡爾坐標系。笛卡爾坐標系可分2D和3D的,在3D中有兩種完全不同的坐標系:左手坐標系和右手坐標系,右手坐標系是X軸向右,Y軸向上,Z軸是指向“自己”的,左手坐標系的Z軸正好相反,是背向“自己”的,在計算機中通常使用的是左手坐標系,而數學中則通常使用右手坐標系。
其他
遊戲和圖形開發中常用的坐標系有:世界坐標系、物體坐標系、攝像機坐標系、慣性坐標系。 世界坐標系是描述其它坐標系所需要的參考框架,只能用世界坐標系描述其他坐標系的位置,不能用更大的,外部的坐標系來描述世界坐標系 。
關於世界坐標系的的典型問題都是關於初始位置和環境的,如:
每個物體的位置和方向。
攝像機的位置和方向。
世界的每一點的地形是什麼。
各物體從哪裡來,到哪裡去。 物體坐標系是和特定物體相關的坐標系。每個物體都有它們獨立的坐標系。
1.每個物體的位置和方向。
2.攝像機的位置和方向。
3.世界的每一點的地形是什麼。
4.各物體從哪裡來,到哪裡去。 物體坐標系是和特定物體相關的坐標系。每個物體都有它們獨立的坐標系。
在物體坐標系中可能會遇到的問題:
周圍有需要互相作用的物體嗎?(我要攻擊它嗎?)
哪個方向,在我前面嗎?我左邊一點?(我應該射擊還是轉身就跑) 攝像機坐標系是和觀察者密切相關的坐標系。是一種特殊的“物體”坐標系。
1.周圍有需要互相作用的物體嗎?(我要攻擊它嗎?)
2.哪個方向,在我前面嗎?我左邊一點?(我應該射擊還是轉身就跑) 攝像機坐標系是和觀察者密切相關的坐標系。是一種特殊的“物體”坐標系。
典型問題:
3D空間中的給定點在攝像機前方嗎?
3D空間中的給定點在螢幕上還是超出了邊界?
某個物體是否在螢幕上?部分還是全部在?
兩個物體誰在前面?(可見性檢測,深度排序) 慣性坐標系是為了簡化世界坐標繫到物體坐標系的轉換。從物體坐標繫到慣性坐標系只需旋轉,從慣性坐標繫到世界坐標系只需平移。 嵌套坐標系同樣為了簡化物體在世界坐標系中位置,如一個物體坐標系嵌套一個頭部坐標系,則頭部坐標系可以只與物體坐標系聯繫,簡化操作。
1.3D空間中的給定點在攝像機前方嗎?
2.3D空間中的給定點在螢幕上還是超出了邊界?
3.某個物體是否在螢幕上?部分還是全部在?
4.兩個物體誰在前面?(可見性檢測,深度排序) 慣性坐標系是為了簡化世界坐標繫到物體坐標系的轉換。從物體坐標繫到慣性坐標系只需旋轉,從慣性坐標繫到世界坐標系只需平移。 嵌套坐標系同樣為了簡化物體在世界坐標系中位置,如一個物體坐標系嵌套一個頭部坐標系,則頭部坐標系可以只與物體坐標系聯繫,簡化操作。
