基本介紹
 仿人機器人
仿人機器人仿人機器人是指具有兩手、兩足、頭部和軀幹等人類外形特徵,能用雙足進行移動和其它類人功能的人形機器人。從上個世紀70年代起,研究人員開始對雙足步行機器人進行研究,至上個世紀90年代前後,仿人機器人的研究取得標誌性的成果,從一般性的擬人行走發展到全方位的擬人。
仿人機器人研究的目的是研究一種能與人和諧共處的類人形機器人,它能在人類現實環境中代替人進行工作,成為人們工作、交流的夥伴。
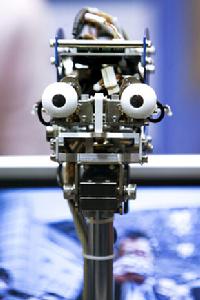
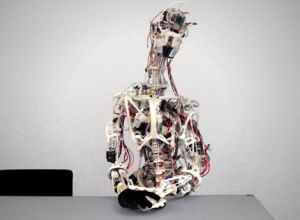
不管機器人在外表上與人類如何相似,一旦揭去它們的外衣,你所能看到的不過是一堆堆雜亂的電線,與我們的體內環境毫無相似之處可言。歐洲的一組科學家正致力於縮小機器人與人類之間的這種差距。他們研製的防人機器人原型能夠高度模擬人類的身體結構。在這種仿人機器人體內,有一副由熱塑性聚合物打造的骨架,與每一塊肌肉相對應的傳動裝置以及類似肌腱的線路。歐洲科學家的目標是研製出與人類更為接近的機器人,能夠像人類一樣與環境發生相互作用並作出反應。
研究重點
 仿人機器人
仿人機器人仿人機器人要能夠理解,適應環境,精確靈活地進行作業,高性能感測器的開發必不可少。感測器是機器人獲得智慧型的重要手段,如何組合感測器攝取的信息,並有效地加以運用,是基於感測器控制的基礎,也是實現機器人自治的先決條件。仿人機器人仿人機器人研究在很多方面已經取得了突破,如關鍵機械單元,基本行走能力,整體運動,動態視覺等,但是離我們理想中的要求還相去甚遠,還需要在仿人機器人的思維和學習能力,與環境的互動,軀體結構和四肢運動,體系結構等方面進行更進一步的研究。 ·
思維和學習能力
現有仿人機器人系統的主要缺陷是對環境的適應性和學習能力的不足。機器的智慧型來源於與外界環境的相互作用,同時也反映在對作業的獨立完成度上。機器人學習控制技術是實現仿人機器人在結構和非結構環境下實現智慧型化控制的一項重要技術。但是由於受到感測器噪音,隨機運動,線上學習方式以及訓練時間的限制,學習控制的實時性還不能令人滿意。仍需要研究和開發新的學習算法,學習方式,以不斷完善學習控制理論和相應的評價理論。目前針對機器人學習控制的研究,大都停留在試驗室仿真的水平上。 ·
與環境的互動
 仿人機器人
仿人機器人仿人機器人與環境相互影響的能力依賴於其富於表現力的交流能力,如肢體語言(包括面部表情),思維和意識的互動。目前,機器人與人的交流僅限於固定的幾個詞句和簡單的行為方式,其主要原因是:
1)大多仿人機器人的信息輸入感測器是單模型的;
2)部分套用多模型感測器的系統沒有採用對話的交流方式;
3)對輸入信息的採集僅限於固定的位置,比如圖像信息,照相機往往沒有多維視角,信息的深度和廣度都難以保證,準確性下降。
軀體結構和四肢運動
毫無疑問,仿人機器人行動的多樣性,通用性和必要的柔性是“智慧型”實現的首要因素。它是保證仿人機器人可塑性和與人交流的前提。仿人機器人的結構則決定了它能不能為人所接受,而且也是它像不像人的關鍵。仿人機器人必須擁有類似人類上肢的兩條機械臂,並在臂的末端有兩指或多指手部。這樣不僅可以滿足一般的機器人操作需求,而且可以實現雙臂協調控制和手指控制以實現更為複雜的操作。仿人機器人要具有完成複雜任務所需要的的感知活動,還要在已經完成過的任務重複出現時要像條件反射一樣自然流暢地作出反應。
體系結構
仿人機器人的體系結構是定義機器人系統各組成部分之間相互關係和功能分配,確定單台機器人或多個機器人系統的信息流通關係和邏輯的計算結構。也就是仿人機器人信息處理和控制系統的總體結構。如果說機器人的自治能力是仿人機器人的設計目標,那么體系結構的設計就是實現這一目標的手段。現在仿人機器人的研究系統追求的是採用某種思想和技術,從而實現某種功能或達到某種水平。
所以其體系結構各有不同,往往就事論事。解決體系結構中的各種問題,並提出具有一定普遍指導意義的結構思想無疑具有重要的理論和實際價值,這是擺在研究人員面前的一項長期而艱巨的任務。
用途
 仿人機器人
仿人機器人仿人機器人具有人類的外觀,可以適應人類的生活和工作環境,代替人類完成各種作業,並可以在很多方面擴展人類的能力,在服務,醫療,教育,娛樂等多個領域得到廣泛套用。
服務
21世紀人類將進入老齡化社會,發展仿人機器人能彌補年輕勞動力的嚴重不足,解決老齡化社會的家庭服務,醫療等社會問題。仿人機器人可以與人友好相處,能夠很好地擔任陪伴,照顧,護理老人和病人的角色,以及從事日常生活中的服務工作,因此家庭服務行業的仿人機器人套用必將形成新的產業和新的市場。
醫療
在醫療領域,仿人機器人可以用於假肢和器官移植,用仿人機器人技術可以做成動力型假肢,協助癱瘓病人實現行走的夢想。然而,我們現在還幾乎看不到以控制論開發出的生物體與人體完美的結合,因此,這方面還需要更進一步的研究和探索。
教育
一般來講仿人機器人在教育領域有兩種套用:
1)學生通過製作仿人機器人來實踐機械結構和複雜控制軟體模組的設計。
2)學生用仿人機器人進行實驗來增強動手能力和解決新問題的能力。
娛樂
仿人形機器人可以用來在展覽會上做廣告,它很吸引人的注意,因為它在外形上更接近人類,所以更能引起人的興趣。另外,它還可以用於家庭娛樂。
結論
仿人機器人是能夠與人相互影響的最理想的機器人,因為它的外形像人,它的思維方式和行為方式也將越來越接近人。仿人機器人能夠通過與環境的互動不斷獲得新知識,而且還能用它的設計者根本想像不到的方式去完成各種任務,它會自己適應非結構化的,動態的環境。在人類的歷史中,曾經因為我們製造機器的局限性,使得我們不得不去適應機器,而現在我們要讓機器來適應我們,仿人機器人是完成這一夢想的最好機會。
套用前景
 仿人機器人
仿人機器人仿人機器人具有重要的潛在套用前景、社會和經濟效益,對放人機器人進行研究對於機器人相關技術的突破具有積極的促進作用。
一方面,仿人機器人與其它機器人相比,對人類生存環境和人類使用的工具有更好的適應性,更易與人相處。使用仿人機器人不需要專門為了機器人能夠協助人類活動和作業,對人類已經習慣的了的生活、工作環境和工具進行大規模改造,從而也就避免了機器人和人類難以直接共處的局面,也節省了對環境改造的經濟成本。
另一方面,仿人機器人是集機械、電子、材料、計算機、感測和控制技術、人工智慧、仿生等多學科於一體的綜合性平台,其關鍵技術的研究成果對國民經濟諸多領域起著重要的推動作用。仿人機器人是真正意義或狹義的“機器人”,其研究成果和水平是一個國家高科技實力和發展水平的重要標誌。
研發歷史
 仿人機器人
仿人機器人被譽為“世界仿人機器人之父”的日本早稻田大學加藤一郎教授在1973年試製成功了世界上第一台兩足步行機器人,命名為WOBAT-1。雖然它只能完成極慢的靜態步行,但它是世界上首個實現了兩足步行的機器人。
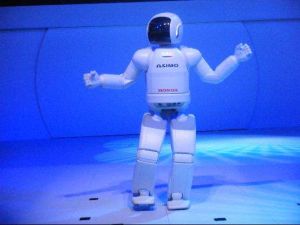
1996年,日本本田技研公司向世人首次展示了該公司秘密研製10年之久的仿人機器人P2。從外形看,P2很接近人的模樣。P2不但能夠完成轉彎、前進、後退、側行等動作,而且還能上下高0.2米、寬0.22米的台階,爬上1:10的斜坡,跨越台階和高0.15米、長0.15米的障礙物。隨後,本田公司於1997年9月完成了仿人機器P3的研製,P3共有28個自由度,除具有P2的所有功能外,其手腳的協調能力進一步加強,行走的步履更加自然,步幅也更大,其時速可達4.5公里/小時。緊接著,本田公司又推出了小型化的仿人機器人ASIMO,ASIMO已初步具備了人類外形特徵和在確定環境中步行與基本操作的能力,它不僅能識別人的面容和聲音,還能夠識別出人的動作和姿勢,並跟蹤人的手勢,功能更加完善。
1998年4月,日本通商產業省啟動“仿人機器人工程”國家項目,圖1-6為通商產業省研製的能搬運物體的仿人機器人HRP-2[42],該仿人機器人能夠實現各種靈活的運動,能夠跨越障礙物,並且能夠從地面搬起物體等
與此同時,SONY公司、豐田公司、日本東京大學、美國麻省理工學院、德國慕尼黑工業大學、韓國都在進行仿人機器人的研製。
中國在仿人機器人的研究方面起步較晚,國防科技大學、哈爾濱工業大學是國內研究仿人機器人起步較早的單位。近年來,清華大學、上海交通大學、上海大學、中科院瀋陽自動化所等都在開展這方面的研究,並已取得階段性的成果。其中,北京理工大學研製於2002年和2005年分別研製出第一代仿人機器人BHR-1和第二代仿人機器人BHR-2(匯童)為傑出代表,目前正在進行第三代仿人機器人BHR-3的研製。
中國政府也逐漸開始關注這個領域。由北京理工大學牽頭、多個單位參加歷經三年攻關打造的仿人機器人名叫“匯童”(如圖),它們主要來自於科技部“十五”863計畫和科工委基礎研究重點項目的資助。據主要研製者黃強教授介紹,通過短短几年技術攻關,我國已掌握了集機構、控制、感測器、電源於一體的高度集成技術,研製出具有視覺、語音對話、力覺、平衡覺等功能的仿人機器人,具有自主智慧財產權;而且“匯童”在國際上首次實現了模仿太極拳、刀術等人類複雜動作,是在仿人機器人複雜動作設計與控制技術上的突破。
仿人機器人不僅是一個國家高科技綜合水平的重要標誌,也在人類生產、生活中有著廣泛的用途。由於仿人機器人具有人類的外觀特徵,因而可以適應人類的生活和工作環境,代替人類完成各種作業。它不僅可以在有輻射、粉塵、有毒的環境中代替人們作業,而且可以在康復醫學上形成動力型假肢,協助癱瘓病人實現行走的夢想。將來它可以在醫療、生物技術、教育、救災、海洋開發、機器維修、交通運輸、農林水產等多個領域得到廣泛套用。目前,我國仿人機器人研究與世界先進水平相比還有差距。我國科技工作者正在為趕超世界先進水平而努力奮鬥。
未來值得關注技術
| 隨著科學技術的不斷發展,從DNA“摺紙術”到骨整合技術,一系列“大想法”受以媒體越來越多的關注,未來我們將有機會觸摸壓電顯示器,也有機會購買自己的第一輛超級電容動力汽車。 |
