
名稱
PID,Proportion Integration Differentiation,比例積分微分,它是一個專業術語,可見於數學、物理、計算機、控制等領域。
相關解說
 PID
PID目前工業自動化水平已成為衡量各行各業現代化水平的一個重要標誌。同時,控制理論的發展也經歷了古典控制理論、現代控制理論和智慧型控制理論三個階段。智慧型 控制的典型實例是模糊全自動洗衣機等。自動控制系統可分為開環控制系統和閉環控制系統。一個控制系統包括控制器、感測器、變送器、執行機構、輸入輸出接 口。控制器的輸出經過輸出接口、執行機構,加到被控系統上;控制系統的被控量,經過感測器,變送器,通過輸入接口送到控制器。不同的控制系統,其感測器、 變送器、執行機構是不一樣的。比如壓力控制系統要採用壓力感測器。電加熱控制系統的感測器是溫度感測器。目前,PID控制及其控制器或智慧型PID控制器 (儀表)已經很多,產品已在工程實際中得到了廣泛的套用,有各種各樣的PID控制器產品,各大公司均開發了具有PID參數自整定功能的智慧型調節器 (intelligent regulator),其中PID控制器參數的自動調整是通過智慧型化調整或自校正、自適應算法來實現。有利用PID控制實現的壓力、溫度、流量、液位控制 器,能實現PID控制功能的可程式控制器(PLC),還有可實現PID控制的PC系統等等。 可程式控制器(PLC) 是利用其閉環控制模組來實現PID控制,而可程式控制器(PLC)可以直接與Controlnet相連,如Rockwell的PLC-5等。還有可以實現 PID控制功能的控制器,如Rockwell 的Logix產品系列,它可以直接與ControlNet相連,利用網路來實現其遠程控制功能。
1、開環控制系統開環控制系統(open-loop control system)是指被控對象的輸出(被控制量)對控制器(controller)的輸出沒有影響。在這種控制系統中,不依賴將被控量反送回來以形成任何閉環迴路。
2、閉環控制系統閉環控制系統(closed-loop control system)的特點是系統被控對象的輸出(被控制量)會反送回來影響控制器的輸出,形成一個或多個閉環。閉環控制系統有正反饋和負反饋,若反饋信號與系 統給定值信號相反,則稱為負反饋( Negative Feedback),若極性相同,則稱為正反饋,一般閉環控制系統均採用負反饋,又稱負反饋控制系統。閉環控制系統的例子很多。比如人就是一個具有負反饋 的閉環控制系統,眼睛便是感測器,充當反饋,人體系統能通過不斷的修正最後作出各種正確的動作。如果沒有眼睛,就沒有了反饋迴路,也就成了一個開環控制系 統。另例,當一台真正的全自動洗衣機具有能連續檢查衣物是否洗淨,並在洗淨之後能自動切斷電源,它就是一個閉環控制系統。
3、階躍回響階躍回響是指將一個階躍輸入(step function)加到系統上時,系統的輸出。穩態誤差是指系統的回響進入穩態後,系統的期望輸出與實際輸出之差。控制系統的性能可以用穩、準、快三個字 來描述。穩是指系統的穩定性(stability),一個系統要能正常工作,首先必須是穩定的,從階躍回響上看應該是收斂的;準是指控制系統的準確性、控 制精度,通常用穩態誤差來(Steady-state error)描述,它表示系統輸出穩態值與期望值之差;快是指控制系統回響的快速性,通常用上升時間來定量描述。
4、PID控制的原理和特點在工程實際中,套用最為廣泛的調節器控制規律為比例、積分、微分控制,簡稱PID控制,又稱PID調節。PID控制器問世至今已有近70年歷史,它 以其結構簡單、穩定性好、工作可靠、調整方便而成為工業控制的主要技術之一。當被控對象的結構和參數不能完全掌握,或得不到精確的數學模型時,控制理論的 其它技術難以採用時,系統控制器的結構和參數必須依靠經驗和現場調試來確定,這時套用PID控制技術最為方便。即當我們不完全了解一個系統和被控對象,或 不能通過有效的測量手段來獲得系統參數時,最適合用PID控制技術。PID控制,實際中也有PI和PD控制。PID控制器就是根據系統的誤差,利用比例、 積分、微分計算出控制量進行控制的。
比例(P)控制
比例控制是一種最簡單的控制方式。其控制器的輸出與輸入誤差信號成比例關係。當僅有比例控制時系統輸出存在穩態誤差(Steady-state error)。
積分(I)控制
在積分控制中,控制器的輸出與輸入誤差信號的積分成正比關係。對一個自動控制系統,如果在進入穩態後存在穩態誤差,則稱這個控制系統是有穩態誤差的 或簡稱有差系統(System with Steady-state Error)。為了消除穩態誤差,在控制器中必須引入“積分項”。積分項對誤差取決於時間的積分,隨著時間的增加,積分項會增大。這樣,即便誤差很小,積 分項也會隨著時間的增加而加大,它推動控制器的輸出增大使穩態誤差進一步減小,直到等於零。因此,比例+積分(PI)控制器,可以使系統在進入穩態後無穩 態誤差。
微分(D)控制
在微分控制中,控制器的輸出與輸入誤差信號的微分(即誤差的變化率)成正比關係。 自動控制系統在克服誤差的調節過程中可能會出現振盪甚至失穩。其原因是由於存在有較大慣性組件(環節)或有滯後(delay)組件,具有抑制誤差的作用, 其變化總是落後於誤差的變化。解決的辦法是使抑制誤差的作用的變化“超前”,即在誤差接近零時,抑制誤差的作用就應該是零。這就是說,在控制器中僅引入 “比例”項往往是不夠的,比例項的作用僅是放大誤差的幅值,而目前需要增加的是“微分項”,它能預測誤差變化的趨勢,這樣,具有比例+微分的控制器,就能 夠提前使抑制誤差的控制作用等於零,甚至為負值,從而避免了被控量的嚴重超調。所以對有較大慣性或滯後的被控對象,比例+微分(PD)控制器能改善系統在 調節過程中的動態特性。
5、PID控制器的參數整定PID控制器的參數整定是控制系統設計的核心內容。它是根據被 控過程的特性確定PID控制器的比例係數、積分時間和微分時間的大小。PID控制器參數整定的方法很多,概括起來有兩大類:一是理論計算整定法。它主要是 依據系統的數學模型,經過理論計算確定控制器參數。這種方法所得到的計算數據未必可以直接用,還必須通過工程實際進行調整和修改。二是工程整定方法,它主 要依賴工程經驗,直接在控制系統的試驗中進行,且方法簡單、易於掌握,在工程實際中被廣泛採用。PID控制器參數的工程整定方法,主要有臨界比例法、反應 曲線法和衰減法。三種方法各有其特點,其共同點都是通過試驗,然後按照工程經驗公式對控制器參數進行整定。但無論採用哪一種方法所得到的控制器參數,都需 要在實際運行中進行最後調整與完善。現在一般採用的是臨界比例法。利用該方法進行 PID控制器參數的整定步驟如下:(1)首先預選擇一個足夠短的採樣周期讓系統工作;(2)僅加入比例控制環節,直到系統對輸入的階躍回響出現臨界振盪, 記下這時的比例放大係數和臨界振盪周期;(3)在一定的控制度下通過公式計算得到PID控制器的參數。
在實際調試中,只能先大致設定一個經驗值,然後根據調節效果修改。
 PID調節儀
PID調節儀對於溫度系統:P(%)20--60,I(分)3--10,D(分)0.5--3
對於流量系統:P(%)40--100,I(分)0.1--1
對於壓力系統:P(%)30--70,I(分)0.4--3
對於液位系統:P(%)20--80,I(分)1--5
參數整定找最佳,從小到大順序查
先是比例後積分,最後再把微分加
曲線振盪很頻繁,比例度盤要放大
曲線漂浮繞大灣,比例度盤往小扳
曲線偏離回復慢,積分時間往下降
曲線波動周期長,積分時間再加長
曲線振盪頻率快,先把微分降下來
動差大來波動慢。微分時間應加長
 液晶PID
液晶PID理想曲線兩個波,前高后低4比1
一看二調多分析,調節質量不會低
PID與自適應PID的區別
首先弄清楚什麼是自適應控制
在生產過程中為了提高產品質量,增加產量,節約原材料,要求生產管理及生產過程始終處於最優工作狀態。因此產生了一種最優控制的方法,這就叫自適應控制。在這種控制中要求系統能夠根據被測參數,環境及原材料的成本的變化而自動對系統進行調節,使系統隨時處於最佳狀態。自適應控制包括性能估計(辨別)、決策和修改三個環節。它是微機控制系統的發展方向。但由於控制規律難以掌握,所以推廣起來尚有一些難以解決的問題。
加入自適應的pid控制就帶有了一些智慧型特點,像生物一樣能適應外界條件的變化。
還有自學習系統,就更加智慧型化了。
比例積微分控制器的專利、軟體及硬體
這在IEEE《控制系統》雜誌上有綜述,可由http://userweb.eng.gla.ac.uk/yun.li/ga_demo/免費下載改善PID微分和積分的方法及:
YLi,KHAng,GCYChong,Patents,software,andhardwareforPIDcontrol:Anoverviewandanalysisofthecurrentart,ControlSystems,IEEE,26(1),42-54。
計算機
概述
PID(Process Identification)作業系統里指進程識別號,也就是進程標識符。作業系統里每打開一個程式都會創建一個進程ID,即PID。
PID(進程控制符)英文全稱為Process Identifier,它也屬於電工電子類技術術語。
PID是各進程的代號,每個進程有唯一的PID編號。它是進程運行時系統隨機分配的,並不代表專門的進程。在運行時PID是不會改變標識符的,但是你終止程式後再運行PID標識符就會被系統回收,就可能會被繼續分配給新運行的程式。另外,PPID是指父程式的識別號。
含義
只要運行一程式,系統會自動分配一個標識。
是暫時唯一:進程中止後,這個號碼就會被回收,並可能被分配給另一個新進程。
只要沒有成功運行其他程式,這個PID會繼續分配給當前要運行的程式。
如果成功運行一個程式,然後再運行別的程式時,系統會自動分配另一個PID。
PID同步控制套用方案
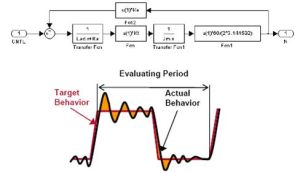
一、控制原理
本系統通過擺桿(輥)反饋的位置信號實現同步控制。收線控制採用實時計算的實際卷徑值,通過卷徑的變化修正PID前饋量,可以使整個系統準確、穩定運行。控制原理如圖:
二、系統特點
1、主驅動電機速度可以通過電位器來控制,把S350設定為SVC開環矢量控制,將模擬輸出端子FM設定為運行頻率,從而給定收卷用變頻器的主速度。
2、收卷用S350變頻器的主速度來自放卷(主驅動)的模擬輸出連線埠。擺桿電位器模擬量
信號通過CI通道作為PID的反饋量。S350的頻率源採用主頻率VI和輔助頻率源PID疊加的方式。通過調整運行過程PID參數,可以獲得穩定的收放卷效果。
3、本系統啟用邏輯控制和卷徑計算功能,能使系統在任意卷徑下平穩啟動,同時兩組PID參數可確保生產全程擺桿控制效果穩定。
三、系統套用
本系統可以廣泛套用於雙變頻拉絲機、塗布機、印刷包裝等行業設備。
檢測器
光離子化檢測器(Photoionization Detector, PID)是一種通用性兼選擇性的檢測器,對大多數有機物都有回響信號,美國EPA己將其用於水、廢水和土壤中數十種有機污染物的檢測。
類型
光離子化檢測器從結構上可分為光窗型和無光窗型兩種。
⑴ 無光窗離子化檢測器
這是一種利用微波能量激發常壓惰性氣體產生的電漿,作為光源的光離子化檢測器(Microwave Photo-ionization detector),以石英或硬質玻璃管材料製作。當樣品的組分進入光 離子化檢測器離子化室後,分子組分被高 能量的電漿激發為正離子和 自由電子,在強電場的作用下作定向運動形成離子流並輸出信號;當分子的電離能高於 光子能量時則不會發生離子化效應。如選用氦氣作為放電氣體,在理論上可檢測一切氣化的物質。
⑵光窗式光離子化檢測器
它克服了無視窗式光離子化檢測器的許多缺陷,主要由紫外光源和電離室組成,中間由可透紫外光的光窗相隔,窗材料採用鹼金屬或鹼土金屬的氟化物製成。在電離室內待測組分的分子吸收紫外光 能量發生電離,選用不同能量的燈和不同的晶體光窗,可選擇性地測定各種類型的化合物。
特點
⒈光離子化檢測器對大多數有機物可產生回響信號,如對芳烴和烯烴具有選擇性,可降低混合碳氫化合物中烷烴基體的信號,以簡化色譜圖。
2 光離子化檢測器不但具有較高的靈敏度,還可簡便地對樣品進行前處理。在分析 脂肪烴時,其 回響值可比火焰離子化 檢測器高50倍。
3 具有較寬的線性範圍(107),電離室體積小於50μe,適合於配置毛細管柱色譜。
4 它是一種非破壞性檢測器,還可和質譜、 紅外檢測器等實行聯用,以獲取更多的信息。
5 光離子化檢測器和火焰離子化檢測器聯用,可按結構區分芳烴、烯烴和烷烴,從而解決了極性相近化合物的族分析問題。它還可與色譜微波電漿發射光譜相媲美,並且直觀,方法簡便。
6 可在常壓下進行操作,不需使用氫氣、空氣等,簡化了設備,便於攜帶。
其他含義
隨身碟PID
隨身碟PID是指Product ID(產品ID),與VID一樣,都對於量產工具很重要。
流程圖
PID:Piping & Instrument Diagram,工藝管道儀表流程圖
P&ID的設計是在PFD(PFD:Process Flow Diagram 工藝流程圖,可以說是簡化版的PID)的基礎上完成的。它是化工廠的工程設計中從工藝流程到工程施工設計的重要工序,是工廠安裝設計的依據。
化工工程的設計,從工藝包、基礎設計到詳細設計中的大部分階段,P&ID 都是化工工藝及工藝系統專業的設計中心,其他專業(設備、機泵、儀表、電氣、管道、土建、安全等)都在為實現P&ID里的設計要求而工作。
廣義的P&ID可分為工藝管道和儀表流程圖(即通常意義的P&ID)和公用工程管道和儀表流程圖(即UID)兩大類。
由於P&ID的設計千變萬化,對同一工藝流程的裝置,也可以因為外界因素的影響(如用戶要求、地理環境的差異、以及操作人員的經驗不同等),需要在設計P&ID時作出相應對策,再加上設計者不同的處理方法,因而同一工藝流程在不同的工程項目中,其P&ID不可能完全相同,但也不會有太大的差異。P&ID通常有6~8版,視工程需要而定。
一套完整的P&ID及UID清楚地標出工藝流程對工廠安裝設計中的所有要求,包括所有的設備、配管、儀表等方面的內容和數據。
主理想整環
PID(principal ideal domain)在抽象代數中指每個理想都是主理想的整環。
TS流
在TS碼流的分析過程中,我們需要建立PID這樣的一個概念。TS流即合成傳輸流的英文縮寫,在MPEG-2標準中有詳細的說明。
TS流是由多種數據組合而成,一個TS包中的數據可以是視頻數據,音頻數據、填充數據、PSI/SI表格數據……,而每一種數據類型對應唯一的PID。如視頻數據被標註為(PID=45),那么在該TS流中的所有視頻數據的PID都被標註為45,用於區別其他的數據類型。
電勢誘導衰減
PID, potential Induced Degradation, 潛在電勢誘導衰減,是光伏電池板的一種特性,指在高溫多濕環境下,高電壓流經太陽能電池單元便會導致輸出下降的現象。歐洲產業用途太陽能系統大多在比日本高的電壓下使用,在設定5年後的系統中相繼出現該現象,已經成為一個非常嚴重的課題。
PID與環境因素、組件材料以及逆變器陣列接地方式等有關。
解決措施
1 系統
從系統上而言,可以採用串聯組件的負極接地方式來降低PID影響;將逆變器直流側接地,但是現在的逆變器技術並不允許直流側接地,主要是因為無變壓器的逆變器對直流、交流不能進行隔離,所以不能接地;
組件在正向偏壓下PID影響相對於負偏壓下影響很小,因此一種方法是使任意一 塊組件均處於正偏壓。從系統上而言,可以採用串聯組件的負極接地方式來降低PID影響;將逆變器直流側接地,但是現在的逆變器技術並不允許直流側接地,主要是因為無變壓器的逆變器對直流、交流不能進行隔離,所以不能接地;
因為PID衰減是一個可逆的過程,因此可以通過夜間對光伏組件施加反向電壓來 降低PID的影響;
另一種預防措施,就是採用微型逆變器:系統電壓降低,且每台隔離型微逆直流負 端可以接地,產生的PID效應應該可以降低甚至忽略不計;
2 組件
2.1 減反層
含Si多的減反層比含N多的減反層更可以抵抗PID現象。改變折射率成為抗PID的手段之一,但改變電池減反層的折射率會改變電池生產成本和電池的發電效率,在不提高成本並且基本不改變效率的情況下做到抗PID對電池廠是一個非常大的難度。
2.2 封裝
在組件中替換玻璃(降低Na+),但成本太高几乎不可行。
替換EVA,但新材料帶來成本提高和使用中的持續風險。以POE-PE為例
⑴ 目前除非對組件進行PID測試,尚無直接的測試方法可以判斷哪種EVA可以減小 PID效應;
⑵ 在日夜交替的循環的溫度變化下(逐漸結晶而使透明度緩慢下降),透光率是否還 能長期保持尚無實驗數據的支持;
⑶ 吸熱,在光伏組件的使用溫度範圍中有部分分子熔融或移動。
