
概念
衛星星下點是指衛星向徑與地球表面交點的地心經、緯度。星下點是衛星運動在地球表面的投影,其軌跡是將一段時間內衛星在地面投影的連線。
LEO衛星星下點軌跡保持策略最佳化研究
研究背景
衛星在長期的軌道運行期間,由於受到大氣阻力、地球非球形引力以及日月引力攝動的影響,導致其偏離標稱軌道,因此要根據用戶的要求,維持實際運行軌道的性能指標,也就是說當衛星行下點軌跡保持在標稱軌跡附近的一定範圍內則符合要求,超出範圍就必須進行軌道維持。而在軌的LEO衛星中相當一部分軌道高度低於500km,太陽活動中年軌跡維持周期在20d左右。頻繁的軌道維持對衛星的正常任務執行造成了較大的影響,而在軌運行衛星的軌跡保持只是考慮的半長軸衰減的影響,忽略了傾角變化的因素,雖然短期內使用相對保守的控制策略也可滿足任務要求。文獻 給出了太陽同步軌道控制的通用方法,綜述了軌控模式和維持策略,對實際套用意義較小。而文獻只是簡單地考慮了傾角偏置策略對軌跡漂移的影響,未全面考慮半長軸變化和傾角變化帶來的影響。因此,為了尋求最優的軌跡保持策略,延長軌跡保持周期,對LEO衛星所受攝動力進行了詳細的分析,在傾角偏置改善降交點地方時的同時,對其影響星下點軌跡漂移以及半長軸衰減和傾角長期變化引起的星下點軌跡漂移進行了深入的研究,給出了增大半長軸偏置量的星下點軌跡保持方法和計算模型。
LEO衛星的軌跡保持方法
對於LEO衛星,在短期內引起軌跡漂移的主要因素是大氣阻力,其他攝動因素忽略不計,因此在軌跡調整過程中只考慮這一項。在只考慮大氣作用的情況下,長半軸的衰減規律如下:
 衛星星下點
衛星星下點式中:Cd為阻力係數,a為衛星長半軸,A為最大迎風面積,m為衛星質量,n為衛星平均運動角速度,ρ為大氣密度。
研究結論
 衛星星下點
衛星星下點 衛星星下點
衛星星下點 衛星星下點
衛星星下點 衛星星下點
衛星星下點分析了傾角偏置對衛星降交點地方時和星下點軌跡漂移的影響,進一步研究了太陽引力引起的傾角變化和大氣阻力引起的半長軸衰減造成星下點軌跡漂移變化的規律。結果發現,雖然低軌衛星 的攝動量級是 的10 倍,但 和 卻是同一量級,也就是說它們對星下點軌跡漂移影響接近。因此,可以通過增大半長軸的偏置量來抵消傾角變化對星下點軌跡漂移的影響,從而延長了軌跡保持周期,減小了軌道維持頻度,在工程套用中有重要的意義。
基於OpenGL的衛星星下點軌跡可視化仿真
OpenGL是開放性圖形庫(全稱是Open Graphic Library)的簡稱,它是一個三維的計算機圖形和模型庫,是由SGI公司為其圖形工作站開發的IRISGL演變而來的。OpenGL最顯著的特點是與硬體系統的無關性,可方便地將應用程式移植到另一個作業系統中,它能直接面向硬體調用3D處理功能,故處理3D圖形速度特別快。
對於開發者而言,OpenGL是包含幾十個指令或函式的集合,包括物體旋轉、平移縮放、材質、光照、紋理、像素、點陣圖、文本以及提高圖形表現性能等。利用這些函式對三維的幾何對象進行描述,並利用坐標變換、對象著色、光照、消隱及映像到二維螢幕處理,最終實現三維圖形的顯示,它基本上涵蓋了開發可視化圖形程式的方方面面。
OpenGL圖形的實現
(1)OpenGL體系結構
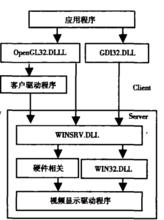 圖1 OpenGL/NT體系結構
圖1 OpenGL/NT體系結構OpenGL是一個與平台無關的三維圖形接口,作業系統必須提供像素格式管理和渲染環境管理。OpenGL在Windows上的實現是基於Client/Server模式的,應用程式發出OpenGL命令,由動態程式庫OpenGL32.DLL接收和打包後,傳送到伺服器端的WINSRV.DLL,然後由它通過DDI層發往視頻顯示驅動程式。如果系統安裝了硬體加速器,則由硬體相關的DDI來處理。OpenGL/NT的體系結構如圖1所示。
(2)OpenGL渲染描述表(RC)與Windows設備描述表
OpenGL的繪圖方式與Windows一般的繪圖方式是不同的,OpenGL使用的是渲染描述表RC(Render Context)繪圖,並且採用特殊的像素格式,而Windows採用的是GDI繪圖,使用時必須指定所用的設備描述表DC(DeviceContext)。使用OpenGL也必須指定一個渲染描述表RC,以存儲OpenGL所需的渲染信息如像素格式等,創建RC時與一個DC建立聯繫(RC也只能通過已經建立了點陣圖格式的DC來創建),OpenGL的函式就可以通過RC對應的DC畫到相應的顯示設備上。在使用OpenGL命令向視窗中繪圖之前,必須先建立一個RC,並使之成為當前RC。
衛星星下點軌跡數據分析
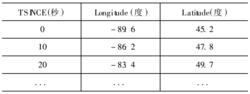 表1 衛星經歷時間以及經緯度(輸出)
表1 衛星經歷時間以及經緯度(輸出)該文的衛星星下點軌跡數據,採用衛星軌道兩行根數TLE檔案,使用NORADSGP4/SDP4軌道模型,可以獲得精確的軌道預測。TLE考慮了地球扁率、日月引力的長期和周期攝動影響,以及大氣阻力模型產生的引力共振和軌道衰退。TLE是“平均”根數,它用特定的方法去掉了周期擾動項;預測模型必須用同樣的方法重構周期擾動項。因此,TLE並不適用於所有的解析解模型,為了獲得高的預測精度,應該採用1980年12月NORAD公布的數學模型,該文的模型選用NORAD的SGP4和SDP4模型。SGP4模型用於近地目標,是Lane和Cranford1969年解析理論的簡化。地球引力場模型採用Von-Zeipel正則變換方法給出的攝動解結果;大氣模型採用密度加權函式。SGP8是SGP4的外延,用於深空目標。深空方程由Hujsak於1979年開發,模型考慮了地球扁率和日月引力。該文中,利用SGP4/SDP4模型計算衛星星曆,再根據衛星的星曆計算星下點軌跡的經緯度。星下點軌跡數據包括:衛星從軌道根數基準時間開始所經歷的時間,星下點的瞬時經緯度。這些數據雖然比較精確,但是不夠直觀和形象,我們採用等距墨卡托投影方法,將星下點投影到地球平面圖上進行繪製和顯示,使其具有形象,直觀的特點。星下點數據的具體計算,在這裡不作詳細介紹。典型的數據如表1所示。
研究結論
通過對傳統CPN的模型和競爭層算法的改進,使網路能更好地逼近函式,提高了CPN的精度,使它能更好地得到利用。但要注意由於CPN採用軟競爭機制進行訓練,當競爭層上沒有分配足夠多的神經元時,將使競爭層變得不穩定,造成CPN網路的功能退化,難以解決一些複雜的問題。同時在競爭層神經元數目增加的情況下,訓練次數應相應增加,否則,網路分布不均勻,輸出不連續。此外訓練樣本的選取次序對網路訓練影響很大,應隨機在樣本空間中選取,不應有一定次序,否則對網路有誤導。
