
國別 美國
名稱 ROBAT遙控掃雷車
ROBAT Remote Controlled Mine-clearing Vehicle
研製單位 陸軍坦克機動車輛局
Army Tank-Automotive Command,US
現狀 完成樣車
概述
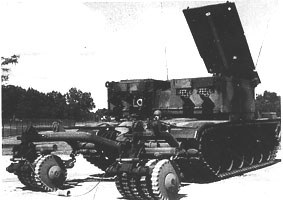 美國ROBAT遙控掃雷車
美國ROBAT遙控掃雷車第一輛XM1060型ROBAT掃雷車樣車於1986年3月17日運抵阿伯丁(Aberdeen)試驗場進行包括部件檢查和調試、行駛試驗、電磁干擾試驗和安全性試驗等在內的性能考核和整車試驗。第二輛樣車也於同年8月運抵該試驗場進行考核試驗。在試驗中使用了1輛M113裝甲車,車上安裝了遙控裝置,以實施機動操縱。原計畫試驗鑑定合格後,由安尼斯頓陸軍基地用M60A3坦克底盤改造142輛。但由於減少了該項目經費,致使原定試驗和生產計畫受到了影響。
該車將機械掃雷和爆破掃雷集於一體,車後還裝有通路標示系統,駕駛員既能在車上操縱,又能遙控操縱,從而同時具有發現雷場、開闢通路和標示通路的能力。在目前各國裝備或研製中的掃雷車中,該車處於領先地位,它的研製成功將大大增強美國陸軍的掃雷實力。
結構特點
1.掃雷滾輪
轍式掃雷滾輪是遙控掃雷車的主要掃雷手段,裝在車前距履帶6m處,它與陸軍現役M60掃雷車前部的掃雷滾輪屬於同一類型。該掃雷滾輪是美軍於70年代初開始研製的,80年代初裝備裝甲兵部隊,由滾輪、滾壓升降裝置和支架組成,全重10t,分左右兩組,每組有5個滾輪。每組掃雷滾輪的掃雷寬度為1.83m,掃協速度為16km/h,對埋在地下10cm深處的壓發地雷,掃除率可達90%。在兩組滾輪間還有1條鏈枷,用來掃除帶有觸發桿引信的地雷。
掃雷滾輪使用可靠、安全、對付壓發地雷的掃雷率較高、耐爆性好、可重複使用,缺點是土壤適應性差,只能對付單一的壓發地雷。
2.掃雷直列裝藥
爆破掃雷是利用炸藥爆炸產生的超壓來誘爆地雷。M58A1掃雷直列裝藥是美軍於80年代中期研製的。
該裝藥分別置於車體兩側的兩個裝甲箱內,拖曳裝藥的火箭彈固定在裝甲箱頂板下,與箱內裝藥相連。當發射火箭彈時,頂板在樞軸上轉動展開,賦予火箭彈發射角度,火箭彈帶動裝藥迅速飛向雷場上方,然後由定距繩控制裝藥前進並將其拉直,最後起爆。
每條裝藥長107m,可開闢1條100m長,3.7~4.6m寬的車轍式通路,發射距離達150m。
3.雷場通路標示系統
以往的掃雷車由於缺少通路標示裝置,開闢出的通路無明顯標誌,不利於後續部隊的通行。為彌補這一不足,美軍在遙控掃雷車的後部安裝了通路標示系統。
該系統是1個輕型的裝甲盒,內裝能產生化學發光的“光棒”。當掃雷車在雷場中行進時,由操作手通過遙控裝置啟動通路標示系統,在已開闢的雷場中標明通路,無論白天或黑夜,光棒都能為後續坦克指引安全通路。
4.控制方式
該車安裝了新的無線電/光纖控制系統,在車前裝有電視攝像機,並用光纖電纜與遙控操縱盒相連,光纖可長達2km。當車輛在操作手的視線內時,無線電通信是遙控的主要方式。操作手可用該控制系統在遠處控制發射引爆地畦用的直列裝藥、控制車輛的行駛和制動等。
由於該車採用了M60系列坦克底盤,因此能伴隨裝甲部隊一起行動,駕駛員也可在車上操縱,在機動性、防護力和零配件供應方面能與裝甲部隊一致。
當部隊發現敵人設定的雷場後,即派該車執行掃雷任務。一旦掃雷滾輪將地雷壓爆,即可確定地雷場的前沿。此時掃雷車後退到適當位置,先發射由火箭拖曳的掃雷直列裝藥,引爆通路內的地雷,然後駕駛員從車上取出遙控操縱盒並下車操縱掃雷車,用掃雷滾輪來壓爆通路內殘存的地雷。遙控操縱的距離為1.8km,操作手可通過操縱盒上的監視器清楚地觀察到掃雷車的行進路線、所處位置和掃雷情況。當掃雷車前進時,通路標示系統也同時標出雷場通路,以指引後續坦克通過雷場。
來源
http://www.defenseonline.com.cn/weapon/tank/jqrc/jqrc489.htm
