
基本介紹
橫傾是艦體向一側傾斜斜的狀態。造成橫傾的原因主要是縱中剖面兩側積載不均或一側進水。橫傾後,艦體阻力增大,航速降低,舵面不再垂直於相對流向,轉船力矩減小,橫傾角越大,舵效越低。另外,橫傾後,兩側浸水面積不等,水動力合力作用點偏於一側,產生推艦艇向高舷一側偏轉的力矩;雙螺旋槳艦艇低舷一側的螺旋槳浸水深,效率高,推力略大於高舷螺旋槳,因此形成推力差,也產生向高舷偏轉的力矩。通常除方形艦首的特殊艦船在橫傾時,可能向低舷偏轉外,都有向高舷偏轉的現象。有橫傾的艦艇,在迴轉掉頭時,向舷高一側轉動比較靈活,迴轉直徑也較小。但總的來說,橫傾對艦艇操縱不利。
橫傾力矩
穩性的良好與否是舟艇的內在因素,它決定於舟艇的質量和重心位置及舟艇形狀,引起舟艇橫傾的橫傾力矩則是外在因素,其大小主要由外力對舟艇的作用來決定。橫傾力矩按其作用性質可分為靜力橫傾力矩和動力橫傾力矩。
靜力橫傾力矩
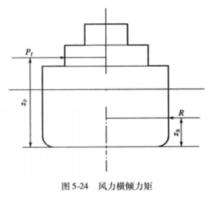 圖1
圖1靜力橫傾力矩是指作用過程緩慢的橫傾力矩,如穩定風力作用,可用靜平衡條件來確定其橫傾角。
如圖1所示,舟艇受橫向穩定風力的作用作等速橫移。這時風力P與水對舟體的橫向阻力R相平衡,則風力橫傾力矩M為:
 橫傾
橫傾式中:z——風力作用點距基線高;
 橫傾
橫傾z——水阻力作用點距基線高,一般z取為:,T為滿載吃水。
橫向風力可按式(2)求得:
 橫傾
橫傾式中:P——橫向風力(N);
A——承受風壓面積(m );
P——風壓強(Pa),可按式(3)算出:
 橫傾
橫傾式中:ρ——空氣密度,取1.226kg/m ;
C——風壓係數,取1.25;
v——橫向穩定相對風速(m/s),可按有關風力等級表確定。
動力橫傾力矩
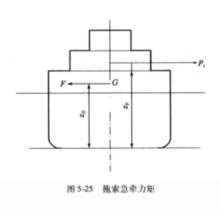 圖2
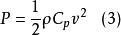
圖2動力橫傾力矩主要指突然作用在舟艇上的橫傾力矩,如橫向突風作用、拖索急牽產生的橫傾力矩,其橫傾角需用動平衡條件確定。
如舟艇在拖索橫向急牽的拖力P作用下(圖2),開始時,舟艇尚無橫移速度,這時橫向水阻力R=0,而在舟艇重心G處存在慣性力F,故拖索急牽橫傾力矩M為:
 橫傾
橫傾式中:z——拖力作用點距基線高;
z——舟艇重心距基線高,可取z≈T。
確定拖索急牽拖力尚無確切數據,可用式(5)估算,即:
 橫傾
橫傾式中:P——拖索拖力(N);
P——牽引舟艇主機功率(kW);
160——拖力係數。
橫傾平衡系統
貨櫃船、火車渡船和特種船舶,在作業時應時時保持左右平衡。為此須設定橫傾平衡水艙,左右對稱。該艙一般設在中部,但從接管考慮,最好儘量靠近機艙。在左傾時將水從左艙泵至右艙,右傾時則相反。可以設定專用的橫傾平衡泵,也可用機艙內的主冷卻海水泵或其他排量較大的水泵兼用。橫傾平衡系統的控制方式大致有下列幾種:遙控四通閥控制;由4隻遙控閥控制;雙向泵控制等。控制箱一般設在貨物控制室或駕駛室。左右兩個平衡水艙都設有高液位報警和低液位報警,接至該控制箱。操作可以手動遙控操作,也可以是自動操作。手動操作時,操作人員根據傾斜儀指示,按動按鈕,將水從左(右)艙泵至右(左)艙。而自動控制時,傾斜儀的信號接入控制箱以控制水的流向。
四通閥控制系統
 圖3
圖3該系統用機艙內的泵,如主海水泵,作為橫傾平衡水泵,用一隻四通閥控制水的流向。四通閥有幾種形式,一種是圓柱形的閥芯上下移動的四通閥;還有一種是四通球閥,旋轉90°就可以改變水的流向,轉動到45°位置為停止位置。閥的控制一般為電動或氣動。如船上有適用的液壓源也可採用液動。圖3所示為該系統的典型原理圖。
4個遙控閥的控制系統
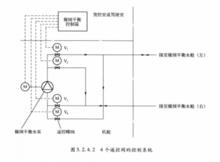 圖4
圖4本系統實質是用4個遙控閥代替一隻四通閥。四通閥外形尺寸比較大,價格貴,所以設計時可用4隻普通的遙控蝶閥代替四通閥,如圖4所示。當V1和V3打開時,水從右艙泵至左艙;當V2和V4打開時水從左艙泵至右艙。
雙向泵控制系統
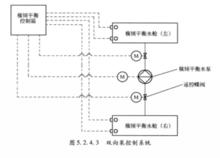 圖5
圖5本系統需設定一台雙向的水泵,一般為軸流泵,所以總的說來比上面所述兩種系統費用要貴一些。但很明顯,其管路極為簡單。如有可能,該泵還可設定在兩個貨艙之問的空艙內,管路不必接到機艙。控制也最簡單,只要改變泵的轉向,即可改變水的流動方向。這種系統適用於中小型貨櫃船,泵的排量一般為300m /h~350m /h,壓力為0.2MPa,管徑為200mm。圖5所示為其原理圖。
