
簡介
按信號的輸出類型分為:電壓輸出、集電極開路輸出、推拉互補輸出和長線驅動輸出 。
形式分類
有軸型:有軸型又可分為夾緊法蘭型、同步法蘭型和伺服安裝型等。
 器件圖片
器件圖片軸套型:軸套型又可分為半空型、全空型和大口徑型等。
以編碼器工作原理可分為:光電式、磁電式和觸點電刷式。
按碼盤的刻孔方式不同分類編碼器可分為增量式和絕對式兩類。
增量式編碼器是將位移轉換成周期性的電信號,再把這個電信號轉變成計數脈衝,用脈衝的個數表示位移的大小。絕對式編碼器的每一個位置對應一個確定的數字碼,因此它的示值只與測量的起始和終止位置有關,而與測量的中間過程無關。
旋轉增量式編碼器以轉動時輸出脈衝,通過計數設備來知道其位置,當編碼器不動或停電時,依靠計數設備的內部記憶來記住位置。這樣,當停電後,編碼器不能有任何的移動,當來電工作時,編碼器輸出脈衝過程中,也不能有干擾而丟失脈衝,不然,計數設備記憶的零點就會偏移,而且這種偏移的量是無從知道的,只有錯誤的生產結果出現後才能知道。
解決的方法是增加參考點,編碼器每經過參考點,將參考位置修正進計數設備的記憶位置。在參考點以前,是不能保證位置的準確性的。為此,在工控中就有每次操作先找參考點,開機找零等方法。
比如,印表機掃瞄器的定位就是用的增量式編碼器原理,每次開機,我們都能聽到噼哩啪啦的一陣響,它在找參考零點,然後才工作。
這樣的方法對有些工控項目比較麻煩,甚至不允許開機找零(開機後就要知道準確位置),於是就有了絕對編碼器的出現。
絕對型旋轉光電編碼器,因其每一個位置絕對唯一、抗干擾、無需掉電記憶,已經越來越廣泛地套用於各種工業系統中的角度、長度測量和定位控制。
絕對編碼器光碼盤上有許多道刻線,每道刻線依次以2線、4線、8線、16線編排,這樣,在編碼器的每一個位置,通過讀取每道刻線的通、暗,獲得一組從2的零次方到2的n-1次方的唯一的2進制編碼(格雷碼),這就稱為n位絕對編碼器。這樣的編碼器是由碼盤的機械位置決定的,它不受停電、干擾的影響。
 旋轉編碼器/增量或絕對值編碼器/拉線編碼器
旋轉編碼器/增量或絕對值編碼器/拉線編碼器絕對編碼器由機械位置決定的每個位置的唯一性,它無需記憶,無需找參考點,而且不用一直計數,什麼時候需要知道位置,什麼時候就去讀取它的位置。這樣,編碼器的抗干擾特性、數據的可靠性大大提高了。
由於絕對編碼器在定位方面明顯地優於增量式編碼器,已經越來越多地套用於工控定位中。絕對型編碼器因其高精度,輸出位數較多,如仍用並行輸出,其每一位輸出信號必須確保連線很好,對於較複雜工況還要隔離,連線電纜芯數多,由此帶來諸多不便和降低可靠性,因此,絕對編碼器在多位數輸出型,一般均選用串列輸出或匯流排型輸出,德國生產的絕對型編碼器串列輸出最常用的是SSI(同步串列輸出) 。
工作原理
由一個中心有軸的光電碼盤,其上有環形通、暗的刻線,有光電發射和接收器件讀取,獲得四組正弦波信號組合成A、B、C、D,每個正弦波相差90度相位差(相對於一個周波為360度),將C、D信號反向,疊加在A、B兩相上,可增強穩定信號;另每轉輸出一個Z相脈衝以代表零位參考位。由於A、B兩相相差90度,可通過比較A相在前還是B相在前,以判別編碼器的正轉與反轉,通過零位脈衝,可獲得編碼器的零位參考位。
編碼器碼盤的材料有玻璃、金屬、塑膠,玻璃碼盤是在玻璃上沉積很薄的刻線,其熱穩定性好,精度高,金屬碼盤直接以通和不通刻線,不易碎,但由於金屬有一定的厚度,精度就有限制,其熱穩定性就要比玻璃的差一個數量級,塑膠碼盤是經濟型的,其成本低,但精度、熱穩定性、壽命均要差一些。
解析度—編碼器以每旋轉360度提供多少的通或暗刻線稱為解析度,也稱解析分度、或直接稱多少線,一般在每轉分度5~10000線 。
特點
旋轉編碼器是集光機電技術於一體的速度位移感測器。
信號輸出
信號輸出有正弦波(電流或電壓),方波(TTL、HTL),集電極開路(PNP、NPN),推拉式多種形式,其中TTL為長線差分驅動(對稱A,A-;B,B-;Z,Z-),HTL也稱推拉式、推挽式輸出,編碼器的信號接收設備接口應與編碼器對應。
信號連線—編碼器的脈衝信號一般連線計數器、PLC、計算機,PLC和計算機連線的模組有低速模組與高速模組之分,開關頻率有低有高。
如單相聯接,用於單方向計數,單方向測速。
A.B兩相聯接,用於正反向計數、判斷正反向和測速。
A、B、Z三相聯接,用於帶參考位修正的位置測量。
A、A-,B、B-,Z、Z-連線,由於帶有對稱負信號的連線,在後續的差分輸入電路中,將共模噪聲抑制,只取有用的差模信號,因此其抗干擾能力強,可傳輸較遠的距離。
對於TTL的帶有對稱負信號輸出的編碼器,信號傳輸距離可達150米。
旋轉編碼器由精密器件構成,故當受到較大的衝擊時,可能會損壞內部功能,使用上應充分注意。
注意事項
安裝
安裝時不要給軸施加直接的衝擊。
編碼器軸與機器的連線,應使用柔性連線器。在軸上裝連線器時,不要硬壓入。即使使用連線器,因安裝不良,也有可能給軸加上比允許負荷還大的負荷,或造成撥芯現象,因此,要特別注意。
軸承壽命與使用條件有關,受軸承荷重的影響特別大。如軸承負荷比規定荷重小,可大大延長軸承壽命。
不要將旋轉編碼器進行拆解,這樣做將有損防油和防滴性能。防滴型產品不宜長期浸在水、油中,表面有水、油時應擦拭乾淨。
振動
加在旋轉編碼器上的振動,往往會成為誤脈衝發生的原因。因此,應對設定場所、安裝場所加以注意。每轉發生的脈衝數越多,旋轉槽圓盤的槽孔間隔越窄,越易受到振動的影響。在低速旋轉或停止時,加在軸或本體上的振動使旋轉槽圓盤抖動,可能會發生誤脈衝。
關於配線和連線
誤配線,可能會損壞內部迴路,故在配線時應充分注意:
配線應在電源OFF狀態下進行,電源接通時,若輸出線接觸電源,則有時會損壞輸出迴路。
若配線錯誤,則有時會損壞內部迴路,所以配線時應充分注意電源的極性等。
若和高壓線、動力線並行配線,則有時會受到感應造成誤動作成損壞,所以要分離開另行配線。
延長電線時,應在10m以下。並且由於電線的分布容量,波形的上升、下降時間會較長,有問題時,採用施密特迴路等對波形進行整形。
為了避免感應噪聲等,要儘量用最短距離配線。向積體電路輸入時,特別需要注意。
電線延長時,因導體電阻及線間電容的影響,波形的上升、下降時間加長,容易產生信號間的干擾(串音),因此套用電阻小、線間電容低的電線(雙絞線、禁止線)。
對於HTL的帶有對稱負信號輸出的編碼器,信號傳輸距離可達300米 。
原理特點
旋轉編碼器是集光機電技術於一體的速度位移感測器。
增量式
增量式編碼器軸旋轉時,有相應的相位輸出。其旋轉方向的判別和脈衝數量的增減,需藉助後部的判向電路和計數器來實現。其計數起點可任意設定,並可實現多圈的無限累加和測量。還可以把每轉發出一個脈衝的Z信號,作為參考機械零位。當脈衝已固定,而需要提高解析度時,可利用帶90度相位差A,B的兩路信號,對原脈衝數進行倍頻。
絕對值
絕對值編碼器軸旋轉器時,有與位置一一對應的代碼(二進制,BCD碼等)輸出,從代碼大小的變更即可判別正反方向和位移所處的位置,而無需判向電路。它有一個絕對零位代碼,當停電或關機後再開機重新測量時,仍可準確地讀出停電或關機位置地代碼,並準確地找到零位代碼。一般情況下絕對值編碼器的測量範圍為0~360度,但特殊型號也可實現多圈測量。
正弦波
正弦波編碼器也屬於增量式編碼器,主要的區別在於輸出信號是正弦波模擬量信號,而不是數字量信號。它的出現主要是為了滿足電氣領域的需要-用作電動機的反饋檢測元件。在與其它系統相比的基礎上,人們需要提高動態特性時可以採用這種編碼器。
為了保證良好的電機控制性能,編碼器的反饋信號必須能夠提供大量的脈衝,尤其是在轉速很低的時候,採用傳統的增量式編碼器產生大量的脈衝,從許多方面來看都有問題,當電機高速旋轉(6000rpm)時,傳輸和處理數位訊號是困難的。
在這種情況下,處理給伺服電機的信號所需頻寬(例如編碼器每轉脈衝為10000)將很容易地超過MHz門限;而另一方面採用模擬信號大大減少了上述麻煩,並有能力模擬編碼器的大量脈衝。這要感謝正弦和餘弦信號的內插法,它為旋轉角度提供了計算方法。這種方法可以獲得基本正弦的高倍增加,例如可從每轉1024個正弦波編碼器中,獲得每轉超過1000,000個脈衝。接受此信號所需的頻寬只要稍許大於100KHz即已足夠。內插倍頻需由二次系統完成 。
輸出信號
信號序列
一般編碼器輸出信號除A、B兩相(A、B兩通道的信號序列相位差為90度)外,每轉一圈還輸出一個零位脈衝Z。
 旋轉編碼器
旋轉編碼器當主軸以順時針方向旋轉時,按下圖輸出脈衝,A通道信號位於B通道之前;當主軸逆時針旋轉時,A通道信號則位於B通道之後。從而由此判斷主軸是正轉還是反轉。
正弦輸出編碼器輸出的差分信號如下圖所示:
零位信號
編碼器每旋轉一周發一個脈衝,稱之為零位脈衝或標識脈衝,零位脈衝用於決定零位置或標識位置。要準確測量零位脈衝,不論旋轉方向,零位脈衝均被作為兩個通道的高位組合輸出。由於通道之間的相位差的存在,零位脈衝僅為脈衝長度的一半。
預警信號
有的編碼器還有報警信號輸出,可以對電源故障,發光二極體故障進行報警,以便用戶及時更換編碼器。
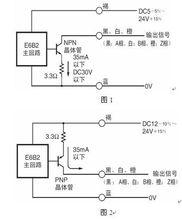
NPN/PNP開路集電極輸出(NPN/PNP Open Collector)
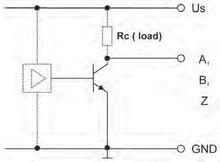 NPN開路集電極輸出
NPN開路集電極輸出最基本的輸出方式,抗干擾能力差,輸出有效距離短。在旋轉編碼器中用於增量型編碼器輸出,現已較少使用。
傳輸介質:所有導線,光纖,無線電
高頻特性:佳
右圖為NPN開路集電集輸出。
 線驅動
線驅動線驅動(TTL/RS422)
對稱的正負信號輸出,抗干擾能力強,最大傳輸距離1000m.
傳輸介質:雙絞線
高頻特性:佳
在旋轉編碼器乃至現今工業控制系統作為電氣連線接口使用非常普遍。
推輓輸出(Push-Pull)
組合了PNP和NPN兩種輸出,對稱的正負信號輸出,可以方便地駁接單端接收,抗干擾能力強,(差分接收);最大傳輸距離100m。
傳輸介質:雙絞線(差分接收);所有導線,光纖,無線電(單端接收)。
高頻特性:好
其它
其它的接口方式還有RS232(C),RS485以及絕對編碼器常用的SSI,各種現場總路線(如Profibus,Devicenet,CANopen等) 。
常用術語
輸出脈衝數/轉
旋轉編碼器轉一圈所輸出的脈衝數發,對於光學式旋轉編碼器,通常與旋轉編碼器內部的光柵的槽數相同(也可在電路上使輸出脈衝數增加到槽數的2倍4倍)。
解析度
解析度表示旋轉編碼器的主軸旋轉一周,讀出位置數據的最大等分數。絕對值型不以脈衝形式輸出,而以代碼形式表示當前主軸位置(角度)。與增量型不同,相當於增量型的“輸出脈衝/轉” 。
光柵
光學式旋轉編碼器,其光柵有金屬和玻璃兩種。如是金屬制的,開有通光孔槽;如是玻璃制的,是在玻璃表面塗了一層遮光膜,在此上面沒有透明線條(槽)。槽數少的場合,可在金屬圓盤上用沖床加工或腐蝕法開槽。在耐衝擊型編碼器上使用了金屬的光柵,它與金屬制的光柵相比不耐衝擊,因此在使用上請注意,不要將衝擊直接施加於編碼器上。
最大回響頻率是在1秒內能回響的最大脈衝數(例:最大回響頻率為2KHz,即1秒內可回響2000個脈衝)
公式如下:
最大回響轉速(rpm)/60×(脈衝數/轉)=輸出頻率Hz
最大回響轉速是可回響的最高轉速,在此轉速下發生的脈衝可回響公式如下:
最大回響頻率(Hz)/ (脈衝數/轉)×60=軸的轉速rpm
輸出波形輸出脈衝(信號)的波形。
輸出信號相位差
二相輸出時,二個輸出脈衝波形的相對的的時間差。
輸出電壓
指輸出脈衝的電壓。輸出電壓會因輸出電流的變化而有所變化。各系列的輸出電壓請參照輸出電流特性圖
起動轉矩
使處於靜止狀態的編碼器軸旋轉必要的力矩。一般情況下運轉中的力矩要比起動力矩小。
軸允許負荷
表示可加在軸上的最大負荷,有徑向和軸向負荷兩種。徑向負荷對於軸來說,是垂直方向的,受力與偏心偏角等有關;軸向負荷對軸來說,是水平方向的,受力與推拉軸的力有關。這兩個力的大小影響軸的機械壽命
軸慣性力矩
該值表示旋轉軸的慣量和對轉速變化的阻力
轉速
該速度指示編碼器的機械載荷限制。如果超出該限制,將對軸承使用壽命產生負面影響,另外信號也可能中斷。
格雷碼
格雷碼是高級數據,因為是單元距離和循環碼,所以很安全。每步只有一位變化。數據處理時,格雷碼須轉化成二進制碼。
工作電流
指通道允許的負載電流。
工作溫度
參數表中提到的數據和公差,在此溫度範圍內是保證的。如果稍高或稍低,編碼器不會損壞。當恢復工作溫度又能達到技術規範
工作電壓
編碼器的供電電壓
安裝事項
要避免與編碼器剛性連線,應採用板彈簧。
安裝時編碼器應輕輕推入被套軸,嚴禁用錘敲擊,以免損壞軸系和碼盤。
長期使用時,請檢查板彈簧相對編碼器是否鬆動;固定倍恩編碼器的螺釘是否鬆動。
實心軸編碼器
編碼器軸與用戶端輸出軸之間採用彈性軟連線,以避免因用戶軸的串動、跳動而造成BEN編碼器軸系和碼盤的損壞。
安裝時請注意允許的軸負載。
應保證編碼器軸與用戶輸出軸的不同軸度<0.20mm,與軸線的偏角<1.5°。
安裝時嚴禁敲擊和摔打碰撞,以免損壞軸系和碼盤。
電器方面
接地線應儘量粗,一般應大於φ3。
編碼器的信號線不要接到直流電源上或交流電流上,以免損壞輸出電路。
編碼器的輸出線彼此不要搭接,以免損壞BEN編碼器輸出電路。
與編碼器相連的電機等設備,應接地良好,不要有靜電。
開機前,應仔細檢查,產品說明書與BEN編碼器型號是否相符,接線是否正確。
配線時應採用禁止電纜。
長距離傳輸時,應考慮信號衰減因素,選用輸出阻抗低,抗干擾能力強的輸出方式。
避免在強電磁波環境中使用。
環境方面
編碼器是精密儀器,使用時要注意周圍有無振源及干擾源。
請注意環境溫度、濕度是否在儀器使用要求範圍之內。
不是防漏結構的編碼器不要濺上水、油等,必要時要加上防護罩絕對是相對於增量而言的,顧名思義,所謂絕對就是編碼器的輸出信號在一周或多周運轉的過程中,其每一位置和角度所對應的輸出編碼值都是唯一對應的,如此,便具備掉電記憶之功能也。
絕對編碼器由機械位置決定的每個位置是唯一的,它無需記憶,無需找參考點,而且不用一直計數,什麼時候需要知道位置,什麼時候就去讀取它的位置。這樣,編碼器的抗干擾特性、數據的可靠性大大提高了。
套用
本系統採用相對計數方式進行位置測量。運行前通過編程方式將各信號,如換速點位置、平層點位置、制動停車點位置等所對應的脈衝數,分別存入相應的記憶體單元,在電梯運行過程中,通過旋轉編碼器檢測、軟體實時計算以下信號:電梯所在層樓位置、換速點位置、平層點位置,從而進行樓層計數、發出換速信號和平層信號。
電梯運行中位移的計算如下:H=SI
式中S:脈衝當量 I:累計脈衝數 H:電梯位移
S=πλD/Pρ
D:曳引輪直徑 ρ:PG卡的分頻比 λ:減速器的減速比
P:旋轉編碼器每轉對應的脈衝數
本系統中λ=1/32 D=580mm
Ned=1450r/min P=1024 ρ=1/18
代入S=πλD/Pρ 得S=1.00 mm/脈衝
設樓層的高度為4m,則各樓層平層點的脈衝數為:1樓為0;2樓為4000;3樓為8000;4樓為12000。
設換速點距樓層為1.6米,則各樓層換速點的脈衝數為:上升:1樓至2樓為2400,2樓至3樓為6400,3樓至4樓為10400;下降:4樓至3樓為9600,3樓至2樓為5600,2樓至1樓為1600。
