
“子午儀”衛星導航系統
正文
美國海軍的一種全球、全天候衛星導航定位系統,又稱海軍衛星導航系統。1964年研製成功並投入使用,1967年開始進入民用領域。這種系統利用地面用戶設備接收“子午儀“號衛星一次通過視界期間所發出的信號,就能獲得用戶的準確位置。它定點定位誤差在接收雙頻(400兆赫、150兆赫)信號時,約為0.025海里;接收單頻(400兆赫)信號時,約為0.05海里。因船速和天線高度數據不準,航行時的定位誤差還大一些。一般情況下,一節船速誤差會引入0.25海里定位誤差。授時準確度約25微秒,利用改進的“諾瓦”(NOVA)衛星可達3微秒。系統組成 “子午儀”衛星導航系統由衛星網、地面跟蹤站、計算中心、注入站、美國海軍天文台和用戶接收設備等6部分組成。①衛星網:使用4~5顆衛星,均為近極軌道。衛星軌道約1000公里,運行周期約107分鐘。衛星上的主要設備有:注入信號接收機、存儲器、高穩定石英晶體振盪器、導航信號發射器、天線和太陽電池等。②地面跟蹤站:共4個,各由定向天線跟蹤衛星,接收從衛星發來的信號並進行解調,進行記錄並將數據連同時間修正量傳送到計算中心。③計算中心:根據各跟蹤站送來的數據,計算出每顆衛星未來16小時內在世界時偶數分鐘開始時刻的位置,即衛星固定軌道參數和可變軌道參數,經編碼後送往注入站。④注入站:對數據進行存儲,數據注入每12小時進行一次,以替代衛星中原存的數據,並修正衛星上的時間信號。⑤美國海軍天文台:接收衛星在偶數分鐘時刻的時間同步信號,與世界時比對後,將時差值送入計算中心,使衛星、跟蹤站、計算中心、注入站和用戶設備的時間同步。⑥用戶接收設備:分雙頻道和單頻道兩種,前者用於定位準確度要求高的場合,後者用於一般場合。
 “子午儀”衛星導航系統
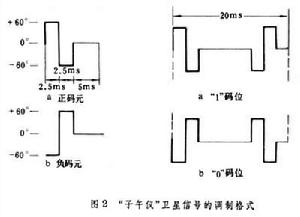
“子午儀”衛星導航系統信號格式 為了補償電離層折射引起的都卜勒計數差值,“子午儀”衛星使用兩個頻率。衛星存儲的全部數據對載頻進行相位調製,每2分鐘向地面發射一次導航信號,供用戶使用。每批電文由字長39位的156個字加上19個附加位組成。每批電文共有6103個碼位,每碼位占用傳送時間約20毫秒。每碼位又由兩個碼元組成,分成正碼元和負碼元。 一個正碼元後接一個負碼元組成“1”碼位,一個負碼元後接正碼元組成“0”碼位(圖2)。
 “子午儀”衛星導航系統
“子午儀”衛星導航系統