
系統介紹
RTLinux是由美國新墨西哥州的fsmlabs(finite state machine labs, 有限狀態機實驗室)公司開發的、利用linux開發的面向實時和嵌入式套用的作業系統。在rtlinux宣言中,這樣描述rtlinux : rtlinux is the hard realtime variant of linux that makes it possible to control robots, data acquisition systems, manufacturing plants, and other time-sensitive instruments and machines。
到目前為止,RT-Linux已經成功地套用於太空梭的空間數據採集、科學儀器測控和電影特技圖像處理等廣泛領域,在電信、工業自動化和航空航天等實時領域也有成熟套用。隨著信息技術的飛速發展,實時系統已經滲透到日常生活的各個層面,包括傳統的數控領域、軍事、製造業和通信業,甚至連潛力巨大的信息家電、媒體廣播系統和數字影像設備都對實時性提出了愈來愈高的要求。
RT-Linux開發者並沒有針對實時作業系統的特性而重寫Linux的核心,因為這樣做的工作量非常大,而且要保證兼容性也非常困難。將linux的核心代碼做一些修改,將linux本身的任務以及linux核心本身作為一個優先權很低的任務,而實時任務作為優先權最高的任務。即在實時任務存在的情況下運行實時任務,否則才運行linux本身的任務。RT-Linux能夠創建精確運行的符合POSIX.1b標準的實時進程;並且作為一種遵循GPL v2協定的開放軟體,可以達GPL v2協定許可範圍內自由地、免費地使用、修改和再發生。
它是Linux在實時性方面的擴展,採用已獲得專利的雙核技術:一個微型的RTLinux核心把原始的Linux核心作為它在空閒時的一個執行緒來運行。這開啟了在兩個不同的核心層面上――實時的RTLinux核心和常用的,非實時的Linux核心――運行不同程式的新方式。原始的Linux核心通過RTLinux核心訪問硬體。這樣,所有硬體實際上都是由RTLinux來進行管理的。有兩種不同的RTLinux版本:RTLinux/Free(或者RTLinux/Open)和RTLinux/Pro. RTLinux/Pro是一個由FSMLabs開發的完全商業版本的實時linux。RTLinux/Free是一個由社區開發的開源版本。
標準Linux
現有的Linux是一個通用的作業系統,雖然它採用了許多技術來提高系統的運行和反應速度,但它本質上不是一個實時作業系統,套用於嵌入式環境中還存在諸多的不足。具體表現如下:
關中斷問題
在系統調用中,為了保護臨界區資源,Linux處於核心臨界區時,中斷會被系統禁止,這就意味著如果當前進程正處於臨界區,即使它的優先權較低,也會延遲高優先權的中斷請求。在實時套用中,這是一個十分嚴重的問題。
進程調度問題
Linux採用標準的UNIX技術使得核心是不可搶占的。採用基於固定時間片的可變優先權調度,不論進程的優先權多么低,Linux總會在某個時候分給該進程一個時間片運行,即使同時有可以運行的高優先權進程,它也必須等待低優先權進程的時間片用完,這對一些要求高優先權進程立即搶占CPU的實時套用是不能滿足要求的。
時鐘問題
Linux為了提高系統的平均吞吐率,將時鐘中斷的最小間隔設定為10ms,這對於一個周期性的實時任務,間隔要求小於10ms時,就不能滿足實時任務的需要。如果要把時鐘 的間隔改小以滿足周期性的實時任務的需要,由於Linux的進程切換比較費時,時鐘中斷越頻繁,而花在中斷處理上的時間就越多,系統的大部分時間是調用進程調度程式進行進程調度而不能進行正常的處理。
RTLinux的特點
在Linux 作業系統中,調度算法(基於最大吞吐量準則)、設備驅動、不可中斷的系統調用、中斷禁止以及虛擬記憶體的使用等因素,都會導致系統在時間上的不可預測性,決定了Linux作業系統不能處理硬實時任務。RTLinux為避免這些問題,在Linux核心與硬體之間增加了一個虛擬層(通常稱作虛擬機),構築了一個小的、時間上可預測的、與Linux核心分開的實時核心,使得在其中運行的實時進程滿足硬實時性。並且RTLinux和Linux構成一個完備的整體,能夠完成既包括實時部分又包括非實時部分的複雜任務。
實現機理
RT-Linux對Linux核心進行改造,將Linux核心工作環境做了一些變化,如圖1 所示:
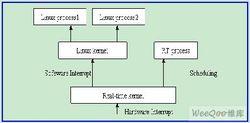 圖1 RTLinux對Linux核心改變
圖1 RTLinux對Linux核心改變RTLinux有兩種中斷:硬中斷和軟中斷。軟中斷是常規Linux核心中斷。它的優點在於可無限制地使用Linux核心調用。硬中斷是安裝實時Linux的前提。依賴於不同的系統,實時Linux下硬中斷的延遲是15μs。
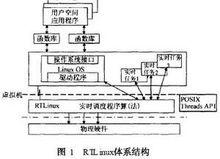
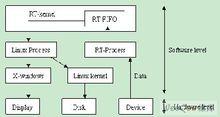 圖2 RTLinux的體系結構
圖2 RTLinux的體系結構RTLinux的體系結構如圖2 所示。RTLinux的設計思想是:套用硬體的實時約束將實時程式分割成短小簡單的部分,較大部分承擔較複雜的任務。根據這一原則,將應用程式分為硬實時和軟實時(即程式)2個部分。
硬實時的實現:
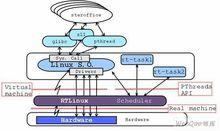 圖3 RT-FIFO結構圖
圖3 RT-FIFO結構圖圖3所示的是RTFIFO結構圖。RTLinux將標準Linux核心作為簡單實時作業系統(RTOS)(或叫子核心)里優先權最低的執行緒來運行,從而避開了Linux核心性能的問題。 從圖3可以看出,RTLinux擁有兩個核心。這就意味著有兩組單獨的API,一個用於Linux環境,另一個用於實時環境。此外,為保證實時進程與非實時Linux進程不順序進行數據交換,RTLinux引入了RT-FIFO佇列。RT-FIFO被Linux視為字元設備,最多可達150個,分別命名為/dev/rtf0、/dev/rtf1……/dev/rtf63。最大的RT-FIFO數量在系統核心編譯時設定。
RTLinux程式運行於用戶空間和核心態兩個空間。RTLinux提供了應用程式接口。藉助這些API函式將實時處理部分編寫成核心模組,並裝載到RTLinux核心中,運行於RTLinux的核心態。非實時部分的應用程式則在Linux下的用戶空間中執行。這樣可以發揮Linux對網路和資料庫的強大支持功能。
軟實時的實現:
RTLinux通過一個高效的、可搶先的實時調度核心來全面接管中斷,並把Linux作為此實時核心的一個優先權最低的進程運行。當有實時任務需要處理時,RTLinux運行實時任務;無實時任務時,RTLinux運行Linux的非實時進程。其系統結構見圖4。
RTLinux在默認的情況下採用優先權的調度策略,即系統調度器根據各個實時任務的優先權來確定執行的先後次序。優先權高的先執行,優先權低的後執行,這樣就保證了實時進程的迅速調度。同時RTLinux也支持其它的調度策略,如最短時限最先調度(EDP)、確定周期調度(RM)(周期段的實時任務具有高的優先權)。RTLinux將任務調度器本身設計成一個可裝載的核心模組,用戶可以根據自己的實際需要,編寫適合自己的調度算法。
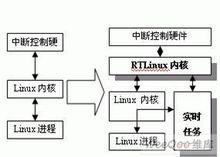 圖4 RTLinux系統結構圖
圖4 RTLinux系統結構圖對於一個作業系統而言,精確的定時機制雖然可以提高任務調度器的效率,但會增加CPU處理定時中斷的時間開銷。RTLinux對時間精度和時鐘中斷處理的時間開銷進行了折中考慮。不是像Linux那樣將8254定時器設計成10ms產生一次定時中斷的固定模式,而是將定時器晶片設定為終端計時中斷方式。根據最近的進程的時間需要,不斷調整定時器的定時間隔。這樣不僅可以獲得高定時精度,同時中斷處理的開銷又最小。
主要功能
RTLinux提供了一整套對硬實時進程的支持函式集。在此,對在嵌入式系統中的實現加以闡述。
a.中斷仿真
在中斷控制硬體與LINUX核心之間放置一個軟體仿真層。具體做法是,在LINUX源碼中出現cli、sti和iret的所有地方都用仿真宏:S_CLI、S_STI和S_IRET來替換。所有的硬體中斷就都被仿真器所截獲。
當需要關中斷時,就將仿真器中的一個變數置0。不論何時若有中斷髮生,仿真器就檢查這個變數。如果是1(LINUX已開中斷),就立即調用LINUX的中斷處理程式;否則,LINUX中斷被禁止,中斷處理程式不會被調用,而是在保存著所有掛起中斷的信息的變數的相應位置1。當LINUX重新開中斷,所有掛起中斷的處理程式都會被執行。這種仿真方式可以稱之為"軟中斷"。
b.實時任務
實時任務是在一個由核心控制的調度程式的調度下執行的用戶定義的程式。
RT-LINUX最初將實時任務設計成ELF格式的目標檔案。這一設計方案的最大缺點就是性能比較差。原因在於,第一,486的快取是虛擬的。所以每當頁表目錄的基址暫存器改變時,TLB(轉換後備緩衝器)就會失效。由於實時任務的上下文轉換頻繁,所以TLB的頻繁失效就導致系統性能的嚴重下降。第二,486的保護級別變換耗時不少。比如,陷入更高級別時需要71個循環,而其它指令一般少於10個循環。
解決的辦法就是使用可載入模組技術,所有的實時任務都同處於一個地址空間-核心地址空間,不僅避免了頻繁的TLB失效,同時也消除了變換保護級別的消耗,而且任務轉換也變得相當容易。
c.進程調度
實時系統的進程調度的主要任務就是滿足實時任務在時間上的要求。調度算法的種類很多,沒有一個策略是放之四海而皆準的,因此採用哪種算法要取決於具體套用。
RT-LINUX採用的方法是允許用戶編寫自己的調度程式,並可以編譯成模組的形式。這樣就可以方便地試驗不同的策略和算法對於某一特定套用的適合性,從中選出最優。
RT-LINUX自帶的是一個基於優先數的搶占式調度程式。此調度程式將LINUX當作具有最低優先數的實時任務。因此,LINUX只在實時系統無任何實時任務是才運行。在從LINUX切換到實時任務時,系統記下軟中斷的狀態並禁止軟中斷。在切換回來實,再恢復軟中斷的狀態。
d.時鐘
調度程式需要精確的時鐘才能準確操作。調度通常是在特定的時刻進行任務切換。時鐘的偏差會引起預定調度的偏差,導致產生被稱為任務發布抖動的現象。這是一種應該儘量避免的不良現象。
RT-LINUX的解決辦法是,將IBM PC兼容機中的時鐘晶片Intel 8254設定為中斷開啟終端計數模式。在這種模式下,精度可以達到1毫秒。這樣在降低中斷處理的影響的同時,獲得了較高的時鐘精度。
e.IPC
由於標準LINUX核心可以被實時任務在任意時刻搶占,所以實時任務無法安全地調用LINUX的程式。但是總要有一個信息交換的機制。
在RT-LINUX中所用的信息交換方式是RT-FIFO(實時佇列)。它與UNIX的管道非常相似,都是一個無結構的數據流。通過RT-FIFO,LINUX的進程之間,實時進程之間,以及LINUX的核心與實時進程之間可以交換信息。
對於一個普通的進程來說,RT-FIFO就是一個特殊的字元檔案。這些檔案必須自建:
# for i in 0 1 2 3; do mknod /dev/rtf$i c 63 $i; done
工作原理
 RTlinux
RTlinuxRTLinux通過硬體和作業系統間的中斷控制來支持硬實時(確定性)操作。進行確定性處理所需要的中斷由實時核心加工,其他中斷被送往非實時作業系統。作業系統運行為低優先權執行緒。先進先出管道(FIFOs)或共享記憶體可以被用來在作業系統和實時核心之間共享數據。RTlinux是原始碼開放的具有硬實時特性的多任務作業系統,它是通過底層對Linux實施改造的產物。通過在L inux核心與硬體中斷之間增加一個精巧的可搶先的實時核心,把標準的Linux核心作為實時核心的一個進程與用戶進程一起調度,標準的Linux核心的優先權最低,可以被實時進程搶斷。正常的Linux進程仍可以在Linux核心上運行,這樣既可以使用標準分時作業系統即Linux的各種服務, 又能提供低延時的實時環境 。
RTLinux是美國新墨西哥州大學計算機科學系VictorYodaiken和Micae Brannanov開發的。它在Linux核心的下層實現了一個簡單的實時核心,而Linux本身作為這個實時核心的優先權最低的任務,所有的實時任務的優先權都高於Linux系統本身的以及Linux系統下的一般任務。RTLinux的體系結構如圖1所示。
將應用程式分為硬實時和程式2個部分。硬體實時部分被作為實時任務來執行,並從外部設備拷貝數據到一個叫做實時有名管道(RTFIFO)的特殊I/O連線埠;程式主要部分作為標準Linux進程來執行。它將從RTFIFO中讀取數據,然後顯示並存儲到檔案中,實時部分將被寫入核心。設計實時有名管道是為了使實時任務在讀和寫數據時不被阻塞。圖2所示的是實時有名管道結構圖。
RTLinux通過對標準Linux核心進行改造,將Linux核心工作環境作了一些變化。如圖2所示,在Linux進程和硬體中斷之間,本來由Linux核心完全控制,在Linux核心和硬體中斷的地方加上了一個RTLinux核心的控制。Linux的控制信號都要先交給RTLinux核心進行處理。在RTLinux核心中實現了一個虛擬中斷機制,Linux本身永遠不能禁止中斷,它發出的中斷禁止信號和打開中斷信號都修改成向RTLinux傳送一個信號。如在Linux裡面使用“SI”和“CLI”宏指令,讓RTLinux裡面的某些標記做了修改。也就是說將所有的中斷分成Linux中斷和實時中斷兩類。如果RTLinux核心接收到的中斷信號是普通Linux中斷,那就設定一個標誌位;如果是實時中斷,就繼續向硬體發出中斷。在RTLinux中執行STI將中斷打開之後,那些設定了標誌位表示的Linux中斷就繼續執行,因此,CLI並不能禁止RTLinux核心的運行,卻可以用來中斷Linux。Linux不能中斷自己,而RTLinux可以。
這裡體現了RTLinux設計過程中的原則:在實時模組中的工作量儘量少,如果能在Linux中完成而不影響實時性能的話,就儘量在Linux中完成,因此,RTLinux核心可以儘量做得簡單。在RTLinux核心中,不應該等待資源,也不需要使用共享旋轉鎖。實時任務和Linux進程之間的通信也是非阻塞的,從來不用等待進佇列和出佇列的數據。RTLinux將系統和設備的初始化交給了Linux 完成,對動態資源的申請和分配也交給了Linux。
RTLinux使用靜態分配的記憶體來完成硬體實時任務,因為在沒有記憶體資源的時候,被阻塞的執行緒是不可能具有實時能力的。
