計算機檢測和控制
正文
將計算機用於試驗、生產或類似的過程中進行數據檢測和操作控制的技術。計算機檢測和控制能提高產品的質量和產量,降低原材料和能源的消耗,改善勞動條件和保證操作安全。為了有效地實現控制,不論是人工系統還是自動化系統,一般都由兩部分組成:一部分獲取足夠的信息;另一部分作出判斷實現控制。所謂信息指的是受控對象和環境的基本數據和變數。在自動化程度較高的系統中,檢測和控制通過計算機建立相互的實時聯繫。計算機反應快、計算準確並能容納大量的信息,所以有人工系統無法比擬的效果。
計算機檢測 試驗和生產過程所產生和所需要的數據是計算機檢測的對象,具有明確的實時性。計算機檢測系統不發出改變被測環境的命令,也沒有相應的硬體。
 計算機檢測和控制
計算機檢測和控制 計算機檢測和控制
計算機檢測和控制數據的記錄、整理和提供 在人工系統中,試驗和生產過程的大量數據由人工記錄或由筆繪記錄儀畫成曲線,這樣記錄下來的數據不便於閱讀、分類、編排、檢索和換算。計算機檢測系統在採集數據的同時還能採集感測器的校準信息,對感測器測出的數據自動進行修正。它還能進行數據平滑和數據監視,並根據可測參數推算出不能直接測量的一些重要參數,例如產品合格率、成本、能源利用率、參數的統計分布等,並及時用多種形式提供給操作人員參考。
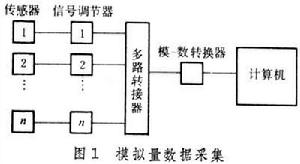
計算機檢測系統不需要人工系統中所用的大面積的儀錶板和成百上千的儀表,只利用通用的輸出設備就能在需要的時刻選擇需要的內容和方式提供信息。對於以模擬量表達的數據,例如控制迴路設定點的電壓等,由一個輸出暫存器和數-模轉換電路提供。
計算機控制 計算機控制包括控制迴路、PID算法、前饋控制法、多變數控制法、自適應控制法和推算控制法。
 計算機檢測和控制
計算機檢測和控制控制迴路的性能在很大程度上取決於控制法則。控制法則又取決於描述該系統的數學模型和實時解算能力。早期的控制器都以模擬量為基礎,所以控制法則和數學模型受到很大的限制。數字計算技術在控制系統中的廣泛套用使控制法則和數學模型擺脫了模擬量本質上的局限性,使模擬量所不能實現的許多控制方法得以實現。
PID算法和控制器 PID算法,即比例-積分-微分三模式算法,是早期發展的一種控制法則
前饋控制法 某些干擾對受控參數的影響是可以預計的。這時若在反饋迴路中將干擾量送進控制器,控制器就能從干擾量送來的信息中提前計算出作動器的輸入量,以彌補反饋控制回響的不足,減小受控參數的偏離值。這個方法對於抑制大的干擾有很好的效果,而且用數位技術不難實現。
多變數控制法 在一個複雜過程的環境中有許多個受控參數。它們分別由各自的閉環迴路控制,由於某些受控參數常互為干擾,因此閉環迴路之間並不都是互相獨立的。當兩個閉環迴路互相耦合時可能導致不穩定而失控。多變數控制法的目的就是解決受控參數之間互為干擾的問題。採用數字計算技術有可能解決這個問題。
自適應控制法 自適應控制的特徵是控制法則隨著受控過程的變化而變化,以適應受控過程的進展情況而得到理想的效果。例如 PID算法中的比例因子隨受控過程的某個參數變化的非線性控制器,即屬於這種類型。選取什麼參數,並按什麼規律改變控制法則是很複雜的問題。自適應控制法雖已開始用於實踐,但還處於研究階段。
推算控制法 某些受控參數不能用直接測量的方法獲得,這時可以利用其他可測參數建立適當的數學模型,經過推算而得到受控參數的值,並且據此採取相應的控制措施。推算控制法還可以與自適應控制法結合使用。
程式控制 計算機控制的一種特殊形式。在圖3中如果不存在干擾源,受控參數就不會偏離設定值,因而無需反饋,也不存在誤差信號。這樣的系統稱為開環控制,代替控制法則的是事先編好的一段程式。它通過作動器使受控參數按所預定的規律變化。因此這樣的控制方式也稱為程式控制,程式控制在計算機輔助製造中得到廣泛的套用。數控工具機就是一例,程式有時是很複雜的,需要用計算機編制,這種程式也常是計算機輔助設計的產物。
計算機監控 一切將計算機檢測和控制技術局限於只為操作人員提供參考情況,而不進行自動控制的系統。採用計算機監控方式,或是由於技術上的原因,如城市污染的控制還作不到自動控制;或是由於安全方面的考慮,如病人的身體狀況只能監控;或是由於其他非技術的原因,如戰略飛彈的發射控制只能監控。在一個監控系統中很多局部環節仍然可以利用計算機進行自動控制。監控系統甚至也可以對決定性的環節提出一個或幾個解決方案,但是決定性的行動最終還必須由操作人員採取。
