定義
 看門狗記時器原理圖
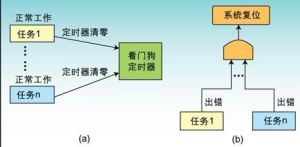
看門狗記時器原理圖看門狗記時器看門狗定時器是單片機的一個組成部分,在單片機程式的調試和運行中都有著重要的意義。
看門狗記時器(WDT,WatchDogTimer)實際上是一個計數器,是一個用獨立時鐘源提供的脈衝進行累加計數的計數器,無需任何外部元件。一般給看門狗一個大數,程式開始運行後看門狗開始倒計數。如果程式運行正常,過一段時間CPU應發出指令讓看門狗復位,重新開始倒計數。如果看門狗減到0就認為程式沒有正常工作,強制整個系統復位。在單片機執行程式期間,一次看門狗WDT逾時溢出,將使單片機產生復位操作(稱為WDT復位)。如果單片機處於睡眠狀態,一次看門狗WDT逾時溢出將使單片機被喚醒,恢復正常運行狀態,並且繼續執行在進入睡眠之前被擱置的程式(稱為WDT喚醒)。每次看門狗逾時溢出,都會使得狀態暫存器STATUS中的了T0位被清0,以記錄曾經發生的這次看門狗溢出事件,供作程式查詢判斷用。
即當WDTE=0時,看門狗WDT將被永久禁止;當WDTE=1時,看門狗WDT將被永久啟用。就是說,只要WDTE被定義成1,以後在用戶程式中將再也無法禁止看門狗的運行。
若想不讓看門狗WDT發生逾時溢出,在用戶程式中只能不停地、周期性地將看門狗計時器清0,使它不會因計數到超過最大值而溢出。
看門狗計時器的計時周期取決於獨立RC振盪源的頻率和計時器的寬度,同時在一定程度上受到工作電壓、環蟑溫度、製作工藝等因素的影響。
另外,看門狗的逾時周期還可以藉助於分頻器以及分頻器的分頻比,在一定範圍內改變和延長。分頻器是否配置給看門狗使用,可以通過用戶程式定義選項暫存器OPTIONKEG的PSA位進行設定。
工作原理
使能時,WDT將遞增,直到溢出,或稱“逾時”。除非處於休眠或空閒模式,WDT逾時會強制器件復位。為避免WDT逾時復位,用戶必須定期用PWRSAV或CLRWDT指令將看門狗定時器清零。如果WDT在休眠或空閒模式下逾時,器件將喚醒並從PWRSAV指令執行處繼續執行代碼。在上述兩種情況下,WDTO位(RCON<4>)都會置1,表示該器件復位或喚醒事件是由於WDT逾時引起的。如果WDT將CPU從休眠或空閒模式喚醒,“休眠”狀態位(RCON<3>)或“空閒”狀態位(RCON<2>)也會置1,表示器件之前處於省電模式。功能作用
看門狗計時器可以在你的程式陷入死循環的時候,讓單片機復位而不用整個系統斷電,從而保護你的硬體電路。看門狗定時器對微控制器提供了獨立的保護系統,當系統出現故障時,在可選的逾時周期之後,看門狗將以RESET信號作出回響,像x25045就可選逾時周期為1.4秒、600毫秒、200毫秒三種。當你的程式當機時,x25045就會使單片機復位。大多數看門狗定時器IC產生一個單一的,有限的輸出脈衝持續時間當看門狗逾時。這適用於觸發復位或中斷微處理器,但有些套用需要輸出(故障指示燈)的鎖存器。
考慮到安全性問題,汽車電子系統需要監控電路監測故障容限或安全性。看門狗定時器可理想滿足這類需求,通過對微控制器正常工作條件下產生的周期脈衝進行檢測,偵測電路或IC的失效狀態,一旦發生故障可立即切換到備份/冗餘系統。
設計
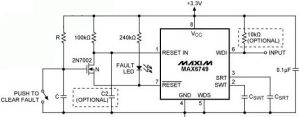 圖1
圖1大多數看門狗定時器IC產生一個單一的,有限的輸出脈衝持續時間當看門狗逾時。這適用於觸發復位或中斷微處理器,但有些套用需要輸出(故障指示燈)的鎖存器。一個簡單的電路(圖1)提供了回響的輸入脈衝流損失鎖存故障指示。在μP-supervisor/watchdog積體電路(MAX*9)的基礎上,該電路用於監測風扇(在風扇的轉速輸出計算),振盪電路,或一個合適的微處理器軟體執行。
在上電期間,低電平有效復位仍然很低,直到VCC的穩定和復位逾時時間到期。電容器C通過R,直到FET的柵極電壓達到閾值(電壓VTH),它開啟了場效應管,使鎖存能力。為了防止誤觸發,你應該設定RC延遲的時間遠遠超過了復位逾時。
WDI輸入(引腳6)必須按切換電容器CSWT設立最低速率。如果這沒有發生,低電平有效復位變低,在LED指示燈,在連線和低拉復位,從而鎖定低電平復位。該電路仍然有效,直到你循環VCC或推開關在此條件。要么關閉FET的行動,並允許重置變高。
為了監測風扇開漏測速信號,從世界發展指標10kΩ的連線到VCC(引腳8)上拉電阻器。由於風扇需要一些時間來旋轉起來,看門狗電路需要為一個短暫的延遲時間間隔停用。您可以通過將本延遲電容(C2)從對地復位。請注意,此延遲必須小於上述RC延遲,或低電平有效復位鎖存過早會較短。
對於一個風扇監控,對CSWT值設定最大轉速脈衝周期根據公式5.06×106×CSWT,其中在幾秒鐘內CSWT。如果轉速低於這個閾值時,低電平有效復位輸出低和插銷。
操作
在正常操作期間,一次WDT逾時溢出將產生一次器件復位。當器件處於休眠狀態時,一次WDT逾時溢出將喚醒器件,使其繼續正常操作(即稱作WDT喚醒)。對WDTE設定位清零可以永久性地關閉WDT。後分頻器分配完全是由軟體控制,即它可在程式執行期間隨時更改。為避免發生不可預測的器件復位,當從Timer0預分頻器的分配改為WDT後分頻器的分配時,必須執行下列指令序列。即使WDT被禁止,也要執行這個指令序列。
