
無線電導航技術
正文
電磁波傳播與導航 無線電導航主要是利用電磁波傳播的三個基本特性:①電磁波在自由空間的直線傳播;②電磁波在自由空間的傳播速度是恆定的;③電磁波在傳播路線上遇到障礙物時會發生反射。電磁波通過不同途徑(如地波、電離層反射等)傳播的損耗是不相同的,因而在其他條件相同情況下作用距離是不同的。在不同途徑上電磁波傳播速度有不同程度的偏差,從而不同程度地影響導航準確度。因此,波段選擇對導航系統的主要性能有很大影響。
①超長波波段(10~30千赫):主要是在沿電離層與地表面之間形成的波導中傳播。這一波段的優點是傳播損耗較小,相位比較穩定而且可以預測,具有透入水下一定深度的能力;其缺點是存在多模干涉區,傳播速度隨季節和晝夜發生變化。因此,需要積累大量觀測數據,編出修正表對所測定區域的位置進行修正。超長波波段適用於遠程導航和在一定深度下的水下導航。奧米加導航系統就是採用10~14千赫的超長波波段。
②長波波段(30~300千赫):大約在300公里範圍內以地波傳播為主;大約在2000~3000公里範圍內以天波傳播為主;處於兩者之間,天波和地波同時存在。地波傳播具有穩定、損耗小、受氣候影響小和無多徑干擾等優點,但存在海岸效應。天波的傳播隨電離層變化,幅度和相位都不穩定,又有多徑效應和電離層色散效應等缺點。因此,在導航中基本上採用地波傳播方式,很少使用天波。然而,由於天波傳播的距離遠,在允許降低準確度的前提下,也可作為地波傳播方式的補充。
③中波波段(300~3000千赫):中波具有較穩定的傳播特性,白天,主要是利用地波傳播,天波被電離層所吸收。夜間,由於D層消失,天波經E層和F層反射,因而強度增加。中波適於中、近程導航,夜間在降低準確度要求的前提下可利用天波擴大工作區。
④超短波波段(30~300兆赫):超短波除低端可被電離層反射外,一般都被電離層折射而透過電離層,從而可得到很尖銳的方向圖和實現脈衝方式工作。因此,它適用於視距傳播和透過電離層的地-空傳播的導航系統。視距傳播的優點是損耗小,缺點是作用距離受視線範圍的限制,並且存在直達波與地面反射波所引起的多徑效應。視距傳播適用於近程導航,地-空傳播適用於衛星導航,但對電離層和對流層的折射效應須進行補償。
⑤微波波段(300兆赫以上):微波也是按視距和地-空路徑傳播的。視距傳播除 10吉赫以上的某些頻率因大氣吸收損耗較大外,一般衰減很小。輻射波束很窄,所以適用於導航雷達。地-空傳播則適用於衛星導航。
導航波段的選擇除考慮傳播特性外,還應符合國際組織關於頻率分配的規定。
位置線和工作區 對運動載體測出的某個幾何參量具有同樣數值的點的軌跡,稱為幾何位置線,簡稱位置線。滿足系統需要的導航準確度時,系統能覆蓋的區域稱為工作區。通過測量無線電導航台發射信號的時間、相位、幅度、頻率參量,可確定運動載體相對於導航台的方位、距離和距離差等幾何參量,確定位置線即可確定運動載體與導航台之間的相對位置關係。運動載體就處在位置線的某一點上。最常見的位置線有直線、圓和雙曲線等。
方位線,即直線位置線(圖1)與通過導航台或運動載體的參考方向線保持不變。對於導航台A,運動載體M的方位為αM,對於運動載體M,導航台的方位為 αA。AM就是一條等方位的直線位置線。具有不同方位的位置線是一組通過導航台或運動載體的輻射形直線族。與導航台保持恆定距離的位置線是一條以導航台為中心的圓位置線(圖2)。具有不同距離的圓位置線是一組以導航台為中心的圓族。從運動載體 M測量到兩個導航台A、B的距離差Rd,Rd保持恆值的等距離差線是一條雙曲線位置線(圖3)。具有不同距離差值的位置線是一組以兩個導航台位置為焦點的共焦雙曲線族。
 無線電導航技術
無線電導航技術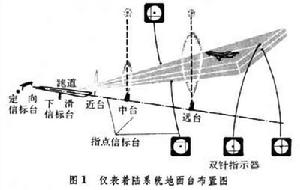 無線電導航技術
無線電導航技術 無線電導航技術
無線電導航技術等方位位置線與等距離位置線相交的定位法稱為極坐標定位法,或稱ρ-θ定位法。等距離位置線與等距離位置線相交的定位法稱為圓-圓定位法,或稱ρ-ρ定位法。雙曲線位置線與雙曲線位置線相交的定位法稱為雙曲線定位法。
為了確定運動載體在空間的位置,如以衛星作為導航台時,則上述位置線的概念可以擴展到位置面。與直線、圓和雙曲線等位置線相對應的位置面是平面、球面和雙曲面,“子午儀”衛星導航系統中的位置面就是雙曲面。
工作區反映導航系統服務的範圍。同一系統,根據準確度要求的不同,工作區的範圍有所不同。不同的導航系統因採用的定位法不同,工作區的圖形也不相同。
工作區除與準確度要求、導航台幾何配置和定位法有關外,還與工作頻率、工作地區、發射功率、天線方向圖和環境噪聲等因素有關。
基線、巷道和巷識別 在雙曲線導航系統中,可供運載體測定一組雙曲線位置線的兩個地面台組成一個台對。組成台對的兩個台在地面大圓上的最短連線稱為基線,其長度即為基線長度。不同的雙曲線導航系統,如台卡、羅蘭C和奧米加等導航系統,根據工作區和準確度的要求,基線長度各不相同。例如,台卡導航系統的基線長度一般為60~120海里,羅蘭C導航系統的基線一般為500~1000海里,而奧米加導航系統的基線可長達 6000海里。
在連續波比相的台卡和奧米加雙曲線導航系統中,通過比較來自兩個台信號的相位而獲得信號時差。相鄰兩條零相位差位置線之間的區域稱為巷道,簡稱為巷。每個巷又分為100個分巷,每一分巷相當於3.6°的相位差。巷道的寬度(即距離)稱為巷寬。基線上的巷寬等於比相波長的一半。例如,奧米加信號的波長約為16海里,它在基線上的巷寬即為8海里。
在基線上每差一個巷寬的距離(半個波長)就出現一個整周的相位差,因為運載體在基線上由一個台向另一個台運動時,接收機離開一個台半個波長的同時也就駛近另一個台半個波長,總的變化就是一個波長。因此,每經過一個巷寬就會出現相同的相位差(即時差)的指示,這種現象稱為相多值性。為了解決巷道多值性問題,系統應該具有獨立驗證運載體所在巷道數的手段。通常用一種準確度較低而巷道較寬的粗測位置線來確定精確位置線所在的巷道數,以消除精測位置線的多值性,這稱為巷識別。
導航準確度和誤差 在某一時刻測得的導航參量讀出值與同一時刻該參量的真值之間的符合程度,稱為導航準確度。導航系統的準確度通常用預測準確度、重複準確度和相對準確度三種方法表示。①預測準確度:以地球地理坐標為依據的位置準確度,也稱絕對準確度;②重複準確度:用戶在使用同一導航系統時能回到上一次測得的位置坐標的精確度;③相對準確度:同一系統的兩個用戶在同一時間測得的一個用戶相對於另一用戶位置的準確度,可用兩個用戶之間的距離的函式表示。相對準確度有時也指用戶測得的相對於用戶自己最近一次位置的準確度。
導航誤差是導航準確度的量度,表示偏離真值的量。造成導航誤差可能的因素有以下三點:①測量方法不夠完善或依據理論的近似性所引起的誤差;②設備性能不完善引起的誤差;③環境條件(大氣噪聲干擾、溫度、地形、地物和電磁波傳播條件的變化等)引起的誤差。在規定導航系統的準確度時,通常不把操作中的人為誤差包括在內。除故障和錯誤外,導航誤差分為系統誤差和隨機誤差兩類。
①系統誤差:測量時數值和符號都按一定規律重複出現的誤差。產生誤差的原因是完全一定的,而且能夠估計出來。因此,可以用引入修正量的辦法對系統誤差進行補償。通常把必須增補到測量結果中的數值稱為修正量。
②隨機誤差:在測量過程中由於大量不能精確預計的並在各次測量中起不同作用的因素所引起的誤差。它是一個可正可負、時大時小的隨機變數。隨機誤差服從統計規律,大氣噪聲、接收機噪聲和電磁波傳播不規則的變化都是引起隨機誤差的原因。
如果誤差統計分布是常態分配,那么隨機誤差落在±σ(σ表示標準偏差)以內的機率為68.27%,稱為1倍σ(1σ)的誤差。導航中多數採用標準偏差的2倍(2σ)來表示,此時表明隨機誤差落在±2σ以內的機率為95.45%。通常規定標準偏差的3倍(3σ)為最大誤差。此時,隨機誤差落在±3σ以內的機率為99.73%。
在二維情況下,常用以表示導航誤差的特徵值是圓機率誤差。它的意義是:以平均位置為中心,定位測量值落在以R為半徑的圓以內的機率為 50%。若測量值與平均值之間的距離為r,則P(r≤R)=0.5。
在二維情況下,表示導航誤差的另一種特徵值是徑向誤差或距離均方根誤差(
 )。當兩條位置線不是正交,並且每條位置線均具有獨立的誤差機率時,合成誤差的分布圖形是橢圓。但橢圓誤差在實際使用中沒有重要的意義,所以採用“等機率誤差圓”,其半徑是根據定位點落在該圓內的機率與落在橢圓內的機率相等(或成比例)的原則計算確定的。這個誤差圓的半徑即為沿誤差橢圓長軸和短軸的1倍σ誤差分量的平方和的平方根,用2σ值就得出2機率圓半徑。和2的圓機率取決於誤差的橢圓度,常用67%的機率,而2則常用95%的機率(圖4)。2已在羅蘭導航系統中套用多年。
)。當兩條位置線不是正交,並且每條位置線均具有獨立的誤差機率時,合成誤差的分布圖形是橢圓。但橢圓誤差在實際使用中沒有重要的意義,所以採用“等機率誤差圓”,其半徑是根據定位點落在該圓內的機率與落在橢圓內的機率相等(或成比例)的原則計算確定的。這個誤差圓的半徑即為沿誤差橢圓長軸和短軸的1倍σ誤差分量的平方和的平方根,用2σ值就得出2機率圓半徑。和2的圓機率取決於誤差的橢圓度,常用67%的機率,而2則常用95%的機率(圖4)。2已在羅蘭導航系統中套用多年。 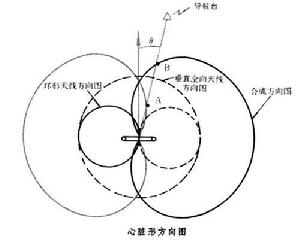 無線電導航技術時要乘以一定的轉換係數(見表)。
無線電導航技術時要乘以一定的轉換係數(見表)。 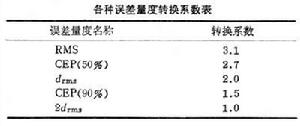 無線電導航技術
無線電導航技術若從運動載體到兩個導航台連線的夾角為 ψ,則幾何因子G為

系統總的定位誤差D 等於位置線測量誤差P 乘上幾何因子G。這表明,系統總的定位誤差由於幾何因子的存在而加大了。
幾何因子的概念最早用於羅蘭 A雙曲線導航系統中。後來,這一概念被推廣套用在衛星導航系統和其他導航系統中,並統一用幾何發散度表示用戶與導航台站之間的幾何位置關係影響定位準確度的綜合量度。幾何發散度GDOP的定義是:導航系統定位均方根誤差(σp)和參與定位的N個導航發射信號源引起的測距均方誤差算術平均值的平方根之比,其數學表達式為
無線電導航信號 含有導航信息的無線電信號。導航信號與導航系統所需要的頻頻寬度、信噪比和抗干擾能力等有關。它對系統的導航功能、定位準確度和設備的繁簡都有直接或間接的影響。因此,它與導航的幾何原理和工作頻率一樣,成為導航系統的重要因素之一。
連續波與脈衝波、調製波與未調波等各種信號波形,頻分多址、時分多址和碼分多址等信號格式,在導航中都得到廣泛的套用。
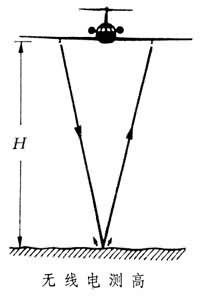
連續波是最簡單的導航信號。例如,無線電羅盤套用方向性天線,以接收信號的幅度測定來波的方位;台卡導航系統套用主副台相關連續波信號的比相來定位。調製的正弦信號也常被套用,如接收的伏爾台的可變信號就是調幅的,在機載接收機中與參考信號比相而獲得方位信息;調頻高度表則套用反射回波與部分發射信號混合產生同高度成比例的差頻信號進行測高。
脈衝波的套用也比較廣泛。例如,導航雷達採用脈衝波,塔康導航系統採用脈幅調製波,羅蘭C導航系統採用脈相調製波,偽隨機碼測距系統採用脈碼調製波。
各種導航系統在台站識別方面採用頻分多址、時分多址和碼分多址的信號格式,即不同台站採用不同的頻率、時間和編碼來相互區分。例如,頻分制套用於台卡和塔康等導航系統,時分制套用於微波著陸系統,碼分制套用於衛星導航系統等。也有把兩種信號體制混合使用的,如奧米加導航系統套用時分-頻分制,用多頻進行巷識別,用時間區分台站。
時頻基準與導航 頻率非常穩定的振盪源可以用作頻率標準,在導航中常稱為頻率基準。由於時間和頻率互為倒數,所以頻率基準也可用作時間基準,一般統稱為時頻基準。
用於無線電導航中的時頻基準主要有石英振盪器及銫原子和銣原子頻率標準。
①石英振盪器:它的優點是簡單、體積小,並且具有良好的短期穩定度,可達到1×10-2/秒;缺點是有緩慢的頻率漂移。它常與原子頻率標準結合使用,作為由原子頻標高穩定度時頻基準控制的輸出接口。它廣泛用於導航接收設備中作為本地基準信號。
②銫原子頻率標準:也稱銫原子鐘,簡稱銫鐘。其特點是頻率準確度高,體積相當於一台普通電子儀器,並且能在衛星上可靠地工作,常用於雙曲線導航系統以作為台站的時頻基準。
③銣原子頻率標準:也稱銣原子鐘,簡稱銣鍾。其性能和體積介於石英振盪器和銫鐘之間。在導航中的套用不如前兩者普遍。
高穩定時頻基準在無線電導航系統中的套用有:①用作雙曲線導航系統地面台之間的同步基準,實現時間同步和相位同步。例如,羅蘭 C台站之間的同步精度要求達到0.1微秒,所以需要配備銫原子鐘作為同步基準。②在圓-圓導航系統中,用戶與導航台之間的偽距離是套用無源測距法通過測量電磁波傳播的時間來測量的。因此在時間上相差1微秒就會造成300米的誤差,這就需要在導航台站配備銫鐘。③在美國“子午儀”衛星導航系統中,衛星電文的長度是 2分鐘,電文的開始時刻與世界時的偶數分鐘開始的時刻同步。衛星地面注入站在時間上受到美國海軍天文台標準時間的控制。根據系統要求,衛星上和地面用戶設備中均裝有高穩定的石英晶體振盪器,其穩定度均為 10-9~10-10量級。④在衛星導航系統NAVSTAR/GPS中,每顆衛星都與“GPS系統時間”保持嚴格同步。衛星上都配備適於空間使用的穩定度很高的銫鐘。由於系統採用偽測距技術,接收機中只需採用石英晶體振盪器。⑤在飛機防撞系統中,利用精密時間同步使每架飛機都能測出同一空域中與其他飛機的距離和距離變化率,這也要在飛機上裝備高穩定的時頻基準。
參考書目
戚凌次編:《無線電觀測原理》上冊,北京科學教育出版社1961。
E.W.Anderson, Principles of Navigation, Hollis & Carter,London,1966.
