
慣性平台
正文
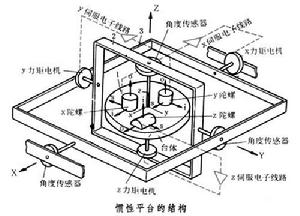
利用陀螺儀在慣性空間使台體保持方位不變的裝置,又稱陀螺穩定平台。它是慣性導航系統中的重要部件。用它可在飛行器上建立一個不受飛行器運動影響的參考坐標系,據以測量飛行器的姿態角和加速度。由慣性平台組成的導航系統稱為平台式慣性導航系統。組成和原理 慣性平台由台體 1、三個單軸陀螺儀、內框架 2、外框架 3、力矩電機、角度感測器和伺服電子線路等組成。台體通過內框架和外框架支承在基座上,基座與飛行器固連。如果沿Y軸存在干擾力矩,就會使內框架和台體繞Y軸轉動。台體上的y單軸陀螺儀感受轉動角速度,單軸陀螺儀處於積分陀螺的工作狀態,輸出與台體轉角成正比的信號(見速率陀螺儀),通過y伺服電子線路加給y力矩電機。力矩電機輸出與干擾力矩相反方向的力矩,使台體向原來的方向轉動。當y力矩電機輸出的力矩與干擾力矩相互抵消時,台體不再轉動,在慣性空間的方位保持不變。當X、Z軸存在干擾力矩時道理相同。飛行器轉動時,台體在慣性空間的方位保持不變,裝在X、Y、Z 軸上的角度感測器即輸出飛行器相對於慣性坐標系的轉角。慣性平台也可用兩個雙軸陀螺儀(雙自由度陀螺儀)等構成。
 慣性平台
慣性平台慣性平台一般採用引入式對準和自主式對準兩種方式對準北向(方位對準)。引入式對準是將外部基準(如羅盤的北向)引入平台並與台體的方位比較,其偏差信號經放大後輸到方位陀螺力矩器,驅使台體繞方位軸轉動,直到偏差信號為零,於是台體的方位與外部基準方位一致。自主式對準是利用陀螺儀感受地球角速度的效應,驅使平台自主地找到地球北向。
當飛行器的姿態角變化很大時,外框架和內框架會發生重合現象,稱為框架自鎖。這時迴路不能正常工作,平台不能繼續用作參考坐標系。增加一個隨動框架可以解決自鎖問題。另一種方法是將台體做成球形並懸浮在液體中而避免使用框架。
參考書目
陸元九編著:《陀螺及慣性導航原理》,科學出版社,北京,1964。
