
分類
以電能、壓縮空氣或壓力油為動力,輸出與控制信號相對應的轉角或直線位移,以一定轉矩或推力推動調節機構,從而完成生產過程參數控制要求的裝置,也稱執行器。根據採用動力源的不同,通常有電動執行機構,氣動執行機構,液動執行機構等。執行機構是自動控制系統的重要環節。它接受來自控制儀表或人工給定的控制信號,對其進行功率放大,然後轉換為輸出軸的相應的角位移或直線位移,用以推動各種調節機構,如調節閥、風門擋板等,改變被調介質流量,以完成各種過程參數的自動控制或人工手動控制。執行機構的動作規律通常是線性的,也有採用等百分比型的。其控制信號有連續的電流信號,也有斷續的電壓信號或脈衝信號。
目前最常用的執行機構是電信號氣動長行程執行機構和電動執行器。
電信號氣動長行程執行機構
以壓縮空氣為動力,可直接接受標準電流控制信號的氣動執行機構,具有動作平穩,推力大,精度高,本質防爆,易於實現所要求的控制規律等特點。其多數品種帶有斷電源、斷氣源、斷電信號的“三斷”自鎖保位功能,使用安全性高。
圖1為氣動執行機構原理框圖。氣動執行機構由自動工作系統和各種輔助裝置兩大部分組成。前者包括電-氣轉換器、定位器、氣缸、連桿等部件,後者包括手操機構、“三斷”自鎖裝置、閥位變送器、行程開關等。電-氣轉換器將電流控制信號變為氣壓控制信號。按力平衡原理工作的定位器和作為動力部件的氣缸以及連桿等構成的自動工作系統的功能是使執行機構的輸出角位移與輸入控制信號相對應。手操機構用於裝置調整和就地應急操作。“三斷”自鎖裝置由氣源、電源、電信號的監控迴路和斷氣源時的鎖緊裝置構成。當上述故障之一發生時,執行機構輸出保位,保證設備和運行安全。閥位變送器將執行機構的輸出角位移轉變為相應的電流信號,行程開關用來發出極限位置的開關量信號。
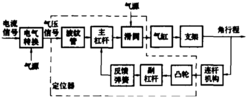 圖1 氣動執行機構原理框圖
圖1 氣動執行機構原理框圖功能完善的帶“三斷”保護的氣動執行機構廣泛用於各個工業部門。但其結構複雜,維護工作量較大。常見的氣動執行機構有僅帶斷氣源保護功能的氣動執行機構,氣動隔膜調節閥,脈衝電信號氣動長行程執行機構等。前兩者結構簡單,後者採用脈衝控制,安全性好。
電動執行器
分角行程、直行程兩大類。根據信號制和全行程時間的不同,又分基型品種和多個派生品種。在自動控制系統中,它們和不同型號電動操作器配用,可實現過程參數的自動控制,控制系統的手動/自動雙向無擾切換,中途限位及遠方手操等功能。
電動執行器由伺服放大器和伺服機構兩大部件配套組成。圖2為電動執行器原理框圖。它是一個位置自動控制系統。來自控制儀表的控制信號和由位置傳送器返回的閥位反饋信號的偏差,經伺服放大器進行功率放大,然後驅動伺服電機,使減速器推動調節機構朝減小偏差方向轉動,輸出軸最後穩定在與控制信號相對應的轉角位置上,電動操作器的作用是進行控制系統的手動/自動切換及遠方手動操作。
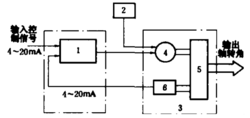 圖2 電動執行器原理框圖
圖2 電動執行器原理框圖1—伺服放大器; 2—電動操作器; 3—伺服機構;4—伺服電機; 5—減速器; 6—位置傳送器
選擇要素
選擇一台合適的閥門執行機構類型和規格時必須考慮下列要素:
驅動能源
最常用的驅動能源是電源或流體源,如果選擇電源為驅動能源,對於大尺寸閥門一般選用三相電源,對於小尺寸閥門可選用單相電源。一般電動執行機構可有多種電源類型供選擇。有時也可選直流供電,此時可通過安裝電池實現電源故障安全操作。
流體源種類很多,首先可以是不同的介質如:壓縮空氣、氮氣、天然氣、液壓流體等,其次它們可以具備各種壓力,第三執行機構具有各種尺寸以提供輸出力活力矩。
閥門類型
當選擇閥門用執行機構時,必須要知道閥門的種類,這樣才可以選擇正確的執行機構類型。有些閥門需要多迴轉驅動,有些需要單迴轉驅動,有些需要往復式驅動,它們影響了執行機構類型的選擇。
通常多迴轉的氣動執行機構比電動多迴轉執行機構價格要貴,但是往復式直行程輸出的氣動執行機構價格比電動多迴轉執行機構便宜。
力矩大小
對於90度迴轉的閥門如:球閥、碟閥、鏇塞閥,最好通過閥門廠商獲得相應閥門力矩大小,大部分閥門廠商是通過測試閥門在額定壓力下閥門所需的操作力矩,他們將這一力矩提供給客戶。對於多迴轉的閥門情況有所不同,這些閥門可分為:往復式(提升式)運動-閥桿不鏇轉、往復式運動-閥桿鏇轉、非往復式-閥桿鏇轉,必須測量閥桿的直徑,閥桿連線螺紋尺寸已決定執行機構規格。
執行機構選型
一旦執行機構類型和閥門所需 驅動力矩確定了,就可以使用執行機構廠商提供的數據表或選型 軟體進行選型。有時還需考慮閥門操作的速度和頻率。
流體驅動的執行機構可調節行程速度,但是三相電源的電動執行機構只有固定的行程時間。
部分小規格的直流電動單迴轉執行機構可調節行程速度。
開關控制
自動控制閥最大的好處是可以遠距離的操作閥門,這就意味著操作人員可以坐在控制室控制生產過程而不需要親臨現場去人工操作閥門的開和關。人們只需鋪設一些管線連線控制室和執行機構,驅動能源通過管線直接激勵電動或氣動執行機構,通常用的4-20mA信號來反饋閥門的位置。
連續控制
如果執行機構被要求用於控制過程系統的液位、流量或壓力等參數,這是要求執行機構頻繁動作的工作,可以用4-20mA或0~10V的模擬量作為控制信號,然而這個信號可能會和過程一樣頻繁的改變。如果需要非常高頻率動作的執行機構,只有選擇特殊的能頻繁啟停的調節型執行機構。當一個過程中需要多台執行機構時,可以通過使用數字通訊系統將各個執行機構連線起來,這樣可大大降低安裝費用。數字通訊迴路可以快速高效的傳遞指令和收集信息。目前有多種通訊方式如:FOUNDATION FIELDBUS、PROFIBUS、DEVICENET、HART和專為閥門執行機構設計的PAKSCAN等。數字通訊系統不單單可以降低投資費用,它們還可以收集大量閥門信息,這些信息對於閥門的預測性維護程式非常有價值。
預測性維護
操作人員可以藉助內置的數據存儲器來記錄閥門每次動作時力矩感應裝置測得的數據,這些數據可以用來監測閥門運行的狀態,可以提示閥門是否需要維修,也可以用這些數據來診斷閥門。
針對閥門可以診斷如下數據:
1.閥門密封或填料摩擦力
2.閥桿、閥門軸承的摩擦力矩
3.閥座摩擦力
4.閥門運行中的摩擦力
5.閥芯的所受的動態力
6.閥桿螺紋摩擦力
7.閥桿位置
上述大部分數據存在於所有種類的閥門,但著重點不同,例如:對於蝶閥,閥門運行中的摩擦力是可以忽略的,但對於鏇塞閥這個力數值卻很大。
不同的閥門具有不同的力矩運行 曲線,例如:對於楔式閘飯,開啟和關閉力矩都非常大,其它行程時只有填料摩擦力和螺紋摩擦力,關閉時,液體靜壓力作用在閘板上增加了閥座摩擦力,最終楔緊效應使力矩迅速增大直到關閉到位。所以根據 力矩曲線的變化可以預測出將會發生的故障,可以對預測性維護提供有價值的信息。
智慧型變頻控制
執行機構在工作過程中,由於電機的頻繁啟動,導致工作時額定頻率的變化,通過智慧型變頻控制可使頻率達到額定值
例如:由於電阻或外力原因,電機啟動速度變慢,導致執行機構行程控制的誤差,運用智慧型變頻控制,可以改變輸入轉速,從而使執行機構的工作更可靠和穩定
廣義執行機構
李學榮於1988年首次提出廣義執行機構的概念,其主要出發點有兩條:1)為了開發性能更加優良的機器,必須將純機械的機構加以拓展,開發出結構新穎的擴展傳統機構功能的廣義執行機構;2)將構成機構的構件加以廣義化。在此基礎上,鄒慧君從現代機械發展動向出發,給出廣義執行機構的更加確切定義:廣義執行機構是由驅動單元與執行單元組成的可控執行機構,是實現機器的機械能轉化、運動生成和轉化等功能的執行者,是機電一體化系統的核心。
廣義執行機構的基本特性
(1)可控性:廣義執行機構通過感測技術、電子技術、控制技術等使機電融合在一起,可根據功能需求的變化,只要對驅動元件進行可程式控制即可實現複雜多變的輸出運動,使原來“剛性化”輸出發展成“柔性化”輸出,實現輸出運動的多樣性。
(2)智慧型化:通過採用一些智慧型化驅動元件,如形狀記憶合金等,使機構輸出運動具有智慧型化,實現機器的智慧型控制。
(3)微型化:通過微型馬達、壓電晶體等作用可使機構產生微米級工作行程,實現機構微型化。
(4)集成性:隨著現代機構技術的發展,通過設計可製造出實現各種運動輸出的“運動集成塊”,如直線位移單元等。
(5)高性能化:廣義執行機構的運動輸出與驅動元件的特性和機構類型有關,而不是單純取決於機構類型。現代的驅動元件己包括各類電機、液壓缸和氣動缸、壓電驅動器、電磁開關、形狀記憶合金等多種形式,其驅動特性不同於傳統單一的動力源。將機構內涵擴大為驅動元件與機構的集成體使得設計師的設計空間由一維設計空間變為同時設計驅動元件參數和機構結構參數並考慮兩者集成的兩維設計空間,設計者有更多的設計參數用以提升機構的運動和動力性能,擴大機構的功能。
廣義執行機構的套用
(1)縫製設備
一百多年來,人們對縫紉機不斷進行改進和革新,從普通腳踏式家用縫紉機發展到多功能工業縫紉機。進入上世紀60年代後,縫紉機的研製開始套用電子技術,出現了機電一體化的縫紉機,這種新型縫紉機用可控電機和微處理器對縫製過程進行控制,提高了縫紉機的柔性。目前,縫製設備向機電結合的方向發展己是業內人士的共識。不少人認為要使四大機構以及橫針機構、剪線機構的動作做到“隨心所欲”,例如任意改變針桿的行為、挑線孔的軌跡和橫針的動作,只採用“傳統機構”己是無能為力,必須求助於“機電運動技術”,以提高縫製設備的性能。
(2)照相機調焦系統
照相機由鏡頭、快門、光圈、調焦裝置、取景器、卷片機構和盒體等部分組成。由於機電一體化技術在該領域中的廣泛套用,其內部大量複雜的機構己經被積體電路、驅動電機和電磁執行元件所代替。照相機從精密機械與光學結合的傳統產品已發展為精密機械、光學和微電子技術三者一體化的自動化系統。
(3)數控銑床
在數控銑床中,主要分別以伺服馬達、齒輪減速機和螺鏇機構為原動機,傳動機構和執行機構,通過利用伺服控制系統來控制伺服馬達的輸出運動,以補償螺鏇機構的運動誤差。廣義執行機構的套用使得螺鏇機構的輸入運動呈非線性函式,可有效地改善輸出運動的三維精度,從而提高工具機的整體性能。
(4)金屬成形壓力機
在金屬成形壓力機的設計中,出現了由大功率的常速電機和小功率的伺服電機混合驅動一個兩自由度的平面七桿機構。這種混合驅動壓力機具有非常優越的性能,可以實現壓力機的低成本數控化。另外,日本Muratec公司採用伺服驅動系統來改善壓力機的工作性能,該系統採用伺服馬達控制沖頭的工作方式,實現了較同類機械高出150%的衝壓速度,並同時抑制了振動及噪音。
