飛行器動態特性
正文
飛行器的穩定性和操縱性,即飛行器保持和改變原有飛行狀態的能力。例如飛行器對突風擾動的反應,對駕駛員操縱動作的反應等。研究特點 研究飛行器的穩定性和操縱性是飛行器飛行動力學的一個重要組成部分(見大氣層飛行動力學)。它與飛機飛行性能或飛彈導引彈道的研究不同,這裡不是將飛行器看作一個質點,而是將飛行器當作為在外力作用下移動和外力矩作用下轉動的質點系來研究。即不僅要考慮飛行器的質量,還要考慮飛行器的質量分布情況。現代所研究的大部分飛行器穩定性和操縱性問題屬於小擾動問題,往往可用線性常係數系統的理論來研究和分析,從而獲得足夠正確的工程結果。
如果飛行器的外形和質量分布相對於縱向平面是對稱的,飛行器的原先運動(或稱基準運動)是在這一對稱平面內,所受的擾動為小擾動(或操縱量不大),不考慮動力裝置轉動部件的陀螺效應,則在研究飛行器的穩定性和操縱性時,可以將縱向運動和橫側運動分開來處理。前者只考慮飛行器在對稱平面內的運動。它常以飛行速度、迎角、俯仰角、航跡角等來描述,這些參數稱為縱向運動參數。後者只考慮飛行器偏離對稱平面的運動。它常以側向速度、側滑角、滾轉角與滾轉角速度、偏航角與偏航角速度來描述,這些參數稱為橫側運動參數。這樣將飛行器運動劃分為兩組相互獨立的運動,可使穩定性和操縱性的研究和分析大為簡化。
在大多數情況下可以將飛行器作為 6自由度的剛體來處理。飛行器在高速飛行中結構變形比較顯著時,方考慮飛行器的氣動彈性變形和飛行器變形產生的空氣動力和力矩的變化(見氣動彈性力學)。
如果在飛行器的總重量中液體燃料占很大比重,例如用液體推進劑的彈道式火箭,則在飛行中燃料晃動往往會給穩定性和操縱性帶來顯著影響,在分析計算中也需要加以考慮(見運載火箭運動理論)。
如果飛行器的擾動運動參數相對於基準運動參數有很大偏離,則不能忽略擾動量的二次項,運動方程則不能線性化。這時空氣動力和力矩也可能呈現非線性現象,於是小擾動理論不再適用,縱、側向運動也不能分開,描述飛行器運動的數學模型將是一組比較複雜的非線性微分方程。此外,如果飛行器的基準運動不是定常運動,而且運動參數變化劇烈,即使擾動量不大,描述飛行器運動的數學模型也將是變係數線性微分方程組。對於這類非線性和變係數問題雖然有一些處理方法,例如採用李雅普諾夫直接法來分析穩定性等,但絕大多數問題還要通過數值計算方法來研究。
氣動導數 飛行器的動態特性與飛行器所受的空氣動力和力矩密切相關。在分析飛行器動態特性時,這些力和力矩往往以空氣動力係數(見空氣動力特性)和空氣動力導數(簡稱氣動導數)的形式出現。氣動導數是空氣動力係數對某些參數(如迎角、 側滑角、 舵偏角、馬赫數等)的導數和這些係數對某些參數隨時間的變化率(如俯仰角速度、滾轉角速度、偏航角速度等)的導數。前者稱為靜導數,後者稱為動導數。氣動導數很多,例如飛行器縱向運動的氣動靜導數中有升力線斜率C姶,表征靜穩定性的m姷,表征升降舵效能的m慦等。氣動動導數中有表征俯仰運動阻尼的m憠,表征下洗(見空氣動力干擾)時差效應的m妉等。在飛行器橫側運動中也有很多類似的氣動導數。此外,在飛行器操縱面的鉸鏈力矩中也還有它本身的氣動導數。
飛行器的穩定性 又稱飛行器的安定性,是飛行器在擾動運動中保持原飛行狀態的能力,即飛行器在擾動下偏離其平衡狀態時的基準運動,但在引起偏離的擾動停止作用後,飛行器的運動特徵參數恢復到它在基準運動時的數值的特性。這種穩定性屬於運動穩定性,所以也稱為飛行器的動穩定性。
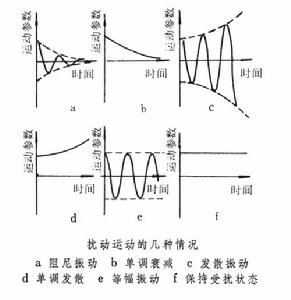
一般情況下飛行器的擾動運動有如下幾種典型情況:①動穩定:擾動運動為減幅振動(阻尼振動),或為單調(非周期)衰減運動(圖中a和b)。②動不穩定:擾動運動為增幅振動(發散振動),或為單調(非周期)發散運動(圖中c和d)。③動中立穩定:擾動運動為等幅振動,或一直保持擾動狀態(圖中e和f)。
 飛行器動態特性
飛行器動態特性靜穩定性通常是指在擾動運動的最初瞬間偏離基準運動的某些特定的運動特徵參數(即迎角和側滑角)有恢復原來數值的趨勢。靜穩定性也有穩定、不穩定和中立穩定之分。討論靜穩定性時,並不討論全部的運動情況,而且具有靜穩定性的飛行器並不一定具有動穩定性。但是靜穩定性是影響擾動特徵的重要因素之一。擾動運動的特徵是指振動的周期、收斂(或發散)的快慢、過渡過程所經歷的時間和振動次數等。研究飛行器穩定性時不僅要判斷是否穩定,而且還要了解這些特徵。
當飛行器的飛行速度和高度的變化範圍很大時,僅依靠飛行器本身固有的穩定性往往不容易在所有飛行情況下都能滿足要求。有的飛行器,如隨控布局飛機,為了要得到減輕重量和減小阻力等益處,故意將飛行器本身設計成靜不穩定和動不穩定的。但是加上增穩裝置或自動駕駛儀等自動器後,作為整個飛行器系統說來還是穩定的。在設計飛行器時,對它本身或對包括自動器在內的整個系統的穩定性往往有明確而具體的要求(見飛機飛行品質)。
飛行器的操縱性 飛行器以相應的運動反應駕駛員或自動器有意施加於操縱機構的動作(包括行程和作用力)的能力。這裡的操縱機構包括各個操縱面(如飛機的升降舵或全動平尾、副翼和方向舵等)和發動機油門等。某些火箭和飛彈用燃氣舵或擺動發動機或小火箭發動機等作為操縱機構。研究飛行器的操縱性往往可以將操縱機構的脈衝偏轉、階躍偏轉或簡諧振動作為輸入量,將飛行器的反應,如迎角、側滑角、過載、角速度、飛行速度等的變化量作為輸出量,研究輸入與輸出的關係。
飛行器的操縱性也可分為靜操縱性和動操縱性。前者研究在平衡狀態時所須施加的操縱量,例如飛機在不同平飛速度時,駕駛員對駕駛桿所應施加的力和位移(或升降舵偏角);後者研究飛機在操縱運動中輸入量和輸出量隨時間變化的全過程。特徵量有相位差、幅值比、過調量、過渡過程時間等。在設計飛行器時往往要求滿足各種操縱指標。
操縱按運動參數不同又分縱向操縱、航向操縱和橫向操縱。縱向操縱通過偏轉升降舵(或全動平尾)和改變油門位置來改變飛行器的迎角、航跡傾角和速度。航向操縱通過偏轉方向舵來改變飛行器頭部的指向。在動力不對稱(如一側發動機停車)、有側風等情況下,還須偏轉方向來進行航向操縱。橫向操縱通過偏轉副翼(或左右翼上的擾流片)來使飛行器產生滾轉運動。橫向操縱與縱向和航向操縱不同。後兩者是“角度操縱”(這裡的縱向操縱不包括油門操縱),即一定量的升降舵或方向舵偏角對應著一定的迎角和側滑角。而橫向操縱是“角速度操縱”,即一定量的副翼偏角對應著一定的滾轉角速度。航向操縱和橫向操縱往往不能分開,而要相互配合和協調動作。例如偏轉方向舵時,時常會同時產生偏航力矩和滾轉力矩。又如飛行器轉彎時往往要同時偏轉方向舵和副翼,達到協調轉彎的目的。航向操縱和橫向操縱合稱為橫側操縱。
飛行器的穩定性和操縱性之間有密切的和對立統一的關係。如靜穩定性強的飛行器操縱比較費力,但它對操縱機構的反應往往比較靈敏。又如,穩定性強的飛機的自由擾動運動衰減得越快,則它“跟隨”駕駛桿越準確,操縱反而容易。
