
定義
機器人按 ISO 8373 定義為:位置可以固定或移動,能夠實現自動控制、可重複編程、多功能多用處、末端操作器的位置要在3 個或 3 個以上 自由度內可程式的工業自動化設備。這裡自由度就是指可運動或轉動的軸。
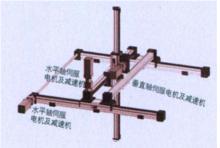
直角坐標機器人是指在工業套用中,能夠實現自動控制的、可重複編程的、運動自由度僅包含三維空間正交平移的自動化設備。各個運動軸通常對應直角坐標系中的X 軸,Y 軸和Z 軸X 軸和Y 軸是水平面內運動軸Z 軸是上下運動軸。在一些套用中Z 軸上帶有一個旋轉軸,或帶有一 個擺動軸和一個旋轉軸。在絕大多數情況下直 角坐標機器人的各個直線運動軸間的夾角為直角.
優點
1、任意組合成各種樣式:每根直線運動軸最長是 6 m,其帶載能力從10kg到200k g。在實際套用中已有近百種結構 的直 角坐標 機器人,這些結構也可以任意組合成新的結構等。
2、超大行程:因為單根龍門式直線運動單元的長度是6 m,還可以多根方便地級連成超大行程,所以其工作空間幾乎沒有限制,小到手機點膠機,大到1 8 m長行程的切割機超大行程時要採用直線導軌和齒條傳動方式。
3、負載能力強:單根直線運 動單元的負載通常小於200k g。但當採用雙滑塊或多滑塊剛性聯結時負載能力可以增加5 到1 0 倍當把兩根或四根直線運動單元並排接起來使用時,其負載可以增加2到4倍。當採用多根多滑塊結構時其負載能力可增加到數噸。
4、高動態特性:輕負載時其最大運行速度可達到 s m /s,加速度可達到4m/s2。使其具有很高的動態特性,工作效 率非常高,通常在幾秒內完成一個工作節拍。
5、高精度:按傳動方式及配置在整個行程內其重複定位精度可達到0.05mm到0.01mm。
6、擴展能力強:可以方便改變結構或通過編程來適合新的套用。
7、簡單經濟:對比關節機器人,直角坐標機器人不僅外觀直觀且構造成本低,編程簡單類同數控銑床,易培訓員工和維修,使其具有非常好的經濟性。
8、壽命長:直角坐標機器人的維護通常就是周期性加注 潤滑油,壽命一般是10年以上,維護好了可達20年。
核心元件
直線運動軸
 直角坐標型機器人
直角坐標型機器人也叫直線運 動單元,它就是一個獨立的運動軸,主要由支撐載體的鋁型材或鋼型材和被安裝在型材內部的直 線導軌、運動滑塊以及作為帶動滑塊做高速運動的同步帶組成。
其核心元件為——直線定位單元一個完整的定位單元(系統)由幾部分組成:
1、定位體型材:作為軌道的安裝支撐部分,該型材不同於一般的框架型材,它要求非常高的直線度,平面度。
2、運動軌道:安裝在定位體型材上,直接支撐運動的滑塊。一個定位體型材(系統)上,可能安裝一根運動軌道,也可能安裝多根運動軌道,軌道的特性及數量直接影響定位單元(系統)的力學特性。組成定位系統的軌道種類很,通用的有直線滾珠軌道,直線圓柱鋼軌道。
3、運動滑塊:由負載安裝板、軸承架、滾輪組(滾珠組)、除塵刷、潤滑腔、密封蓋組成。運動滑塊與軌道通過滾輪或滾珠藕合在一起。實現運動的導向。
4、傳動元件:通用的傳動元件有同步帶、齒形帶、絲槓/滾珠絲槓、齒條、直線電機等。
5、軸承及軸承座:用於安裝傳動元件及驅動元。
驅動系統
直線運動軸之所以能夠實現精確的運動定位,是由電機驅動系統決定的。
常用的驅動系統有:
交流/支流伺服電機驅動系統、步進電機驅動系統、直線伺服電機/直線步進電機驅動系統。每一個驅動系統都由電機和驅動器兩部分組成。驅動器的作用是將弱電信號放大,將其載入在驅動電機的強電上,驅動電機。電機則是將電信號轉化成精確的速度及角位移。
在要求高動態,高速運行狀態、大功率驅動等場合多用交流/支流伺服電機系統作為驅動;在要求低動態,低速運行狀態、小功率驅動等場合可用步進電機系統作為驅動;而在在要求極高動態,高速運行狀態、高定位精度等場合才會用到直線伺服系統驅動。
注意,直角坐標機器人的傳動主要是通過驅動電機的轉動帶動同步帶運動,同步帶帶動直線導軌上的滑塊運動。當驅動軸的最高轉速低於600r/ min時通 常選用步進電機,否則選用交流伺服電機。
控制系統
機器人 要在一 定時 間內完成特定的任務,比如每10s內完成一次搬運工作。在完成抓取,加速運動,高速運 動,減速運動,釋放工件等同時,還要與相關的設備通過通訊或 I / O口實現一些時序上的協調同步。另外在塗膠套用上,各個運動軸要完成直線和圓弧插補運 動。因此其數控系統要按具體套用要求來選定其控制軸數、I / O 口數量和軟體功能。通常選用數控系統,P L C,工控機加運動控制卡和帶軸卡功能及 I / O口的驅動電機來做控制 系統。
根據功能的不同,控制器可以有很多種:
1、工控機與運動控制卡的組合:運動控制卡借用計算機的資源,利用自身的運動控制功能實現控制。
2、脫機運動控制卡:借用計算機編好程式,可將程式自我存儲,脫機運行。
3、PLC-借用計算機編好程式,可將程式自我存儲,脫機運行。
4、專用控制器。
終端設備
直角坐標機器人的終端設備套用途不同,可以裝配各種各樣的操作工具:
如焊接機器人的終端操作工具是焊槍:碼垛機器人終端操作工具是抓手;塗膠(點膠)機器人終端操作工具是膠槍、檢測(監測)機器人終端操作工具是相機或雷射。
有些工作複雜的工作,單一操作工具不能完成,需要安裝兩個或以上操作工具才可以。如對於非固定軌跡運動物體的抓取除需要機械抓手外,還需要一個相機,時刻跟蹤計算物體的空間位置。
套用
因末端操作工具的不同,直角坐標機器人可以非常方便的用作各種自動化設備,完成如焊接、搬運、上下料、包裝、碼垛、拆垛、檢測、探傷、分類、裝配、貼標、噴碼、打碼、(軟仿型)噴塗、目標跟隨、排爆等一系列工作。特別適用於多品種,便批量的柔性化作業,對於穩定,提高產品質量,提高勞動生產率,改善勞動條件和產品的快速更新換代有著十分重要的作用。
這種類型的機器人的普遍套用是計算機數字控制機器(CNC機器)和3D列印。 最簡單的套用是用於銑床和拉絲機,其中鋼筆或銑刀在x-y平面上平移,而刀具升高和降低到表面上以產生精確的設計。 拾取和放置機器和繪圖儀也基於直角坐標型機器人的工作原理。
分類
按用途分:焊接機器人、碼垛機器人、塗膠(點膠)機器人、檢測(監測)機器人、分揀(分類)機器人、裝配機器人、排爆機器人、醫療機器人、特種機器人等。
按結構形式分:壁掛(懸臂)機器人、龍門機器人、倒掛機器人等
按自由度分:兩坐標機器人、三坐標機器人、四坐標機器人、五坐標機器人、六坐標機器人。
