
簡介
 機器蛇
機器蛇機器蛇是一種新型的仿生物機器人,與傳統的輪式或兩足步行式機器人不同的是,它實現了像蛇一樣的“無肢運動”,是機器人運動方式的一個突破。它具有結構合理、控制靈活、性能可靠、可擴展性強等優點。在許多領域具有廣泛的套用前景,如在有輻射、有粉塵、有毒及戰場環境下,執行偵察任務;在地震、塌方及火災後的廢墟中找尋傷員;在狹小和危險條件下探測和疏通管道;為人們在實驗室里研究數學、力學、控制理論和人工智慧等提供實驗平台。
研製歷史
第一代機器蛇
 機器蛇
機器蛇SolidSnake利用垂直和水平方向正交的關節來擬和蛇類生物柔軟的身體,每兩個正交的關節組成一個單元體,每個單元體相當於一個萬向節,具有兩個方向的自由度,整體形成一個高冗餘度的結構體。這樣的機構設計使蛇體具有向任何方向彎曲的能力。
第二代機器蛇
 機器蛇
機器蛇SolidSnakeII蛇形機器人充分考慮了蛇類生物的運動特點,建立了基於行為控制理論的蛇類運動學模型,把蛇類生物的複雜運動形式化解為局部的、簡單的運動形式。採用模組化設計思路,每個關節均可很容易進行拆卸。機器蛇的8個關節整體形成一個高冗餘度的結構體,很容易模仿實現蛇體的複雜運動形式。為了減少機器蛇的運動中的摩擦阻力,在機器蛇兩側安裝有從動輪,實現了蛇體的平穩遊動,增強了蛇形機器人的靈活性和機動性。採用輕型耐磨塑膠製造蛇形機器人的主要結構,既減輕了蛇體的重量,又降低了加工的成本。
SolidSnakeII蛇形機器人設有多項預留位置,如配備局部控制器、位置及力矩侍服器、從動輪鎖死裝置等配套裝置,可實現機器蛇環境識別和自主運動。在機器蛇的頭部配置有紅外線探測頭,可反饋對環境的監視數據。
在電路設計上採用485匯流排聯接。上位機為PC機控制,通過對匯流排的定時輪詢來實現隨時插拔關節。此設計能方便地實現替換任意關節,能根據不同任務隨時拆卸安裝新的關節,甚至實現帶電插拔,極大的增強了蛇形機器人的可靠性和耐用性。並且,SolidSnakeII搭建了完善的軟硬體開發平台,為後續的研究開發奠定了堅實的基礎。
日本1972年,日本東京工業大學的Hirose教授研製了日本第一台蛇形機器人(ActiveCordMechanism-ACMIII)。該機器人的總長為2m,具有20個關節,依靠伺服機構來驅動關節左右擺動。為與地面有效地接觸,該機器人的腹部安裝了腳輪。該機器人的最大速度為40cm/s,只能在平面上運動。繼第一台蛇形機器人之後,Hirose教授的研究室又先後研製了一系列的蛇形機器人。ACM-R3是最近的研究成果,ACM-R3機器人採用完全無線控制的方式,每個關節自帶電源。而且ACM-R3為三維結構,能夠在三維環境中運動和完成複雜的三動作。
日本的NEC公司的Takanashi研製了剛性關節連線的蛇形機器人,該機器人的機構採用了特殊的關節結構,具有6個管狀的連桿,長1.4m,直徑42mm,重4.6kg,能夠實現三維空間運動,可以套用在危險情況下的勘查和營救工作。
NASA的JPL採用了NEC的蛇形機器人結構設計了一種Serpentinerobot,該機器人約1m長,直徑4cm,重量為3.18kg,具有12個自由度,主要是完成在存在障礙物的環境中的操作任務。
美國 正在爬樹的機器蛇“山姆大叔”
正在爬樹的機器蛇“山姆大叔”這款機器蛇“山姆大叔”是使用模組化的分段模型製造的,模型包含制動器與感測器;同時頭部模型配備了一個攝像機。這條蛇的運動是對真蛇的運動進行生物模擬,包括側向纏繞、扭動以及鏇轉動作,還能夠纏繞著樹幹,在樹的表面垂直往上爬。模組化的特點使得機器蛇具有在實地中自組裝的潛力,而且如果哪個節段被損壞還能夠簡化修復過程。這種模組化的特性還意味著機器蛇的長度能夠很容易地根據需要進行調整。
以色列
 機器蛇
機器蛇2010年,以色列研製出的一款“機器蛇”長約2米,其外觀和動作與真蛇別無二致,因此能夠方便用來進行軍事偽裝。它能通過穿越洞穴、隧道、裂縫和建築物秘密地到達目的地,同時傳送圖片和聲音給士兵,士兵通過一台由電腦控制的裝置接收其發回的信息。其次,“機器蛇”還可以用於攜帶爆炸物到指定地點。這款“機器蛇”擁有完美的彎曲“關節”,這使得它易於通過狹小的空間。並且在遇到障礙物時,它可以拱起身子,躍過障礙物進行拍攝工作。除了軍事目的,“機器蛇”還可以發揮其靈活性來幫助尋找被埋在倒塌建築物下的受難者。
德國德國的GMD研製了蛇形機器人。該機器人採用繩索驅動,具有較好的柔性。此外,在蛇形機器人上安裝了紅外線感測器來檢測環境信息。
中國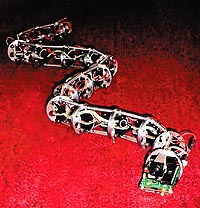 機器蛇
機器蛇在中國,蛇形機器人的研究剛剛起步,但是進步較快。哈爾濱工業大學機器人研究所,上海交通大學等單位首先進行了蛇形機器人仿生方面的一些研究工作。上海交通大學崔顯世、顏國正於1999年3月研製了中國第一台微小型仿蛇機器人樣機,該機構由一系列剛性連桿連線而成,步進電機控制相鄰兩剛性連桿之間的夾角,使連桿可以在水平面內擺動,樣機底面裝有滾動軸承作為被動輪,用以改變縱向和橫向摩擦係數之比,其後又相繼作了一些相關的理論研究。
2001年,國防科技技術大學研製了一個蛇形機器人樣機,這條長1.2米、直徑0.06米、重1.8公斤的機器蛇,能像蛇一樣扭動身軀在地上或草叢中自主地運動,可前進、後退、拐彎和加速,其最快運動速度可達每分鐘20米。頭部是機器蛇的控制中心,安裝有視頻監視器,在其運動過程中可將前方景象實時傳輸到後方的電腦中,科研人員根據實時傳輸的圖像觀察運動前方的情景,向機器蛇發出各種遙控指令。這條機器蛇披上“蛇皮”外衣後,還能像蛇一樣在水中游泳。
中科院瀋陽自動化所機器人重點實驗室也開始了蛇形機器人的研究,並提出一種新型蛇形機器人結構,可實現多種適應環境的平面和空間運動形式,並作了深入的理論研究。瀋陽航天航空大學等單位也開始蛇形機器人的相關研究工作。
挪威
 挪威研製出探索火星機器蛇
挪威研製出探索火星機器蛇2013年10月,挪威科技工業研究院(SINTEFResearchInstitute)設計出一種用於火星表面探測的蛇形機器人,由10個相同的模組構成,通過“關節”連線在一起。每一個模組擁有2個自由度。這些模組表面覆蓋被動輪,賦予機器蛇地面摩擦力,允許它在平坦的地面上行進。
這款機器蛇可沿著火星車運動,通過一根電纜獲得能源。蛇形機器人與火星車之間的連線也意味著,如果火星車被卡住,蛇形機器人能夠幫助火星車脫困。在這種情況下,蛇形機器人能夠降低至地面,也可以盤繞在岩石上。火星車通常能夠依靠電纜絞車將蛇形機器人拉近。這種後援可能能夠拯救2009年被卡住的美國NASA勇氣號火星車。研究人員認為,這種蛇形機器人可以成為火星探測的極好工具,SINTEF從歐洲太空總署(ESA)獲得了50萬挪威克朗(約合85,000美元)的資金,用於研製這種蛇形機器人。
研究方向
 機器蛇
機器蛇1、蛇形機器人系統中模組的功能、設計及實現方法:包括機器人的功能分析和功能的分配,模組的軟、硬體功能分析,模組描述方法的研究,軟、硬體模組的設計,軟、硬體模組自動或快速連線方法的研究。
2、蛇形機器人的構形設計:包括機器人所需完成任務描述方法的研究,機器人構形表達方法的研究,機器人最優構形天生方法的研究。
3、蛇形機器人的運動學和動力學研究應主要考慮軟體的可重構性:包括模組運動學和動力學的分析方法,分散式模組機器人運動學和動力學分析方法的研究。
4、研究適用於可重構蛇形機器人系統的可重構實時控制軟體:包括機器人控制模組的功能分析和劃分方法的研究,軟體重構方法的研究。
套用前景
蛇形機器人具有很多優點,能夠套用到很多複雜和危險的環境中。雖然蛇形機器人的研究尚處在實驗階段,但蛇形機器人有廣泛的套用前景。蛇形機器人可以套用到但不僅僅局限在以下各領域:
科學探險和狀況檢查
 國防科技大學研製的機器蛇
國防科技大學研製的機器蛇代替或部分代替人去完成危險環境中的作業是研製機器人的主要目的之一。科學探險是科學家探索大自然奧秘和豐富地質資源的有利手段,但常常因為環境和氣候惡劣,無法到達目的地完成指定的探險任務。非結構環境下的作業和運動對機器人的性能和運動形式提出了非常嚴格的要求。
防恐防爆和災難救援
自美國紐約的911事件之後,防恐防爆成為各個國家維護國家安全和人民生命財產不受侵害的主題。機器人學的研究人員製作了形式各異的機器人來代替人去完成防恐防爆和救援傷員的任務。蛇形機器人也適合於完成災難救援任務。特別是蛇形機器人身體的各個部分都與地面接觸,對地面的壓力均勻而且非常小,適合在災難後的危險建築中運動和搜救。這些災難主要包括:地震、爆炸、地質陷落、龍捲風和火災等等。
醫療
設計小型的移動機器人,進入人體器官(如腸道、血管)完成手術和定點給藥是機器人研究的一個新的熱門領域。如果將蛇形機器人做得非常小,就可以進入人體的腸道完成作業。
航空航天
探月工程的啟動表明中國政府探索外星系的決心和信心。正像美國的勇氣號和機遇號機器人在火星上執行作業一樣,探月工程也需要機器人來完成各種作業。蛇形機器人有望在這方面得到套用。
危險環境作業
能夠用身體移動和操作是蛇形機器人有別於其它移動機器人的一大特性。它可以穿越狹小空間、進入危險環境,然後完成操作任務。安裝合適的感測器後,也可以套用蛇形機器人來完成排雷任務。
軍事
蛇形機器人本身體形細小,加上合適的偽裝後,便於隱身。此外,如果蛇形機器人的每個單元都安裝上感測器 ,那么它可以用甩掉關節的辦法來布置感測器,形成一個大型的信息系統。作為操作手
將蛇形機器人的一端固定,那么它就變成一個具有冗餘自由度的操作手,可以完成複雜的抓取動作。例如:狹小空間的操作,複雜環境下的避碰操作等等。發展現狀
2014年10月9日,卡內基·梅隆大學機器人研究所的研究人員將關於機器蛇研究成果發表在《科學》雜誌上,該研究解釋了科學家們如何利用生物學知識來推動技術發展。他們設計實驗,準確研究響尾蛇響究竟如何在沙丘上爬行,並將之用於蛇形機器人,以便蛇形機器人可以做同樣的事情。
研究人員發現蛇通過一種獨特的波浪移動增加身體表面與沙粒之間的接觸,以此提高攀爬沙丘的能力。他們將此觀察結論套用於卡耐基-梅隆大學研發的蛇形機器人。在此項研究之前,蛇型機器人在攀爬10度傾斜角沙丘都會遇到許多麻煩。喬治亞理工學院的物理學教授丹尼爾·戈德曼(DanielGoldman)說:“我們最初的想法是以機器人為物理模型研究蛇的運動機制。通過對動物和物理模型的研究,我們了解到十分重要的一般原理,這不僅讓我們更加深入認識了動物,而且與此同時還改進了機器人。”
