定義
植物生長路徑規划算法(Plant Grow Route Planning algorithm, PGRP)。基於植物生長對陽光的充分利用的特徵,汲取植物向光性、背地性、頂端優勢和分枝的基本生理機制進行建模和算法設計,實現從起始點到目標點的路徑規劃能力的算法。PGRP最大的特點是繼承了植物生長對陌生、多變環境的適應性。
原理簡介
PGRP算法將路徑規劃問題的起點假定為植物種子胚芽,路徑規劃問題的終點假定為植物生長所需的光源,以計算的疊代周期將植物生長過程離散化,認為在一個疊代周期內植物生長的行為不變。隨著計算的演進,植物從芽開始進行生長,最先到達光源(即終點)的生長路徑即為路徑規劃的結果。PGRP基於植物生長充分利用陽光的特點,抽取以下作用機理作為算法的基本規則——向光性、背地性、頂端優勢和分枝。通過對上述規則物理含義的數學抽象,實現適用於UAV航電系統嵌入式計算機運行的實時代碼。
植物的向光性是指在單向光照射下,植物生長發生定向彎曲的現象,是植物對不良光照的適應機制。算法設計中將向光性抽象為:芽的生長方向受到在限定的參考區域內環境光強的影響。環境光強的計算假定當前點光強的大小與當前點與目標點的距離平方成反比,此外還考慮參考範圍內的障礙物對光線的遮擋效果,對障礙物產生陰影下的點進行光強修正。由此得到的光強矢量用於確定該芽的生長方向和生長速度。
植物的背地性是指植物前端具有面向天,背離地面生長的特性,作為向光性機制的補充。為了在算法中加入背地性的作用,首先對重力矢量進行定義:以起始點和目標點的連線作為鉛垂方向,重力矢量由目標點指向起點。背地性和向光性均會對芽的生長方向產生影響。
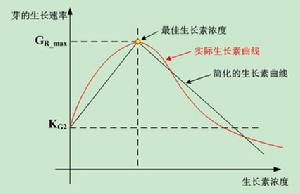
植物的頂端優勢是指植物的頂芽生長對側芽萌發和側枝生長的抑制作用,包括對側枝生長角度的影響。其原理是由於生長素的由上至下的極性運輸和芽對生長素濃度的不同回響(見圖1紅色曲線)兩方面共同作用的結果。極性運輸使得側芽生長素濃度過高,導致側芽抑制生長,而頂芽生長素濃度適宜,促進其生長,從而產生頂端優勢。算法中將生長素極性運輸的量通過芽的細胞年齡差值確定。細胞年齡表達了該細胞在整個植物的生理位置,細胞年齡越大表示離植物的形態學上端越近。簡化起見,算法中將生長素濃度和生長速度的關係進行特徵提取,得到建立如圖1中黑色線段的模型。
植物的分枝是指在主桿的基礎上,為了更好地吸收側翼的陽光而生長新的枝幹。在算法中,通過分枝的作用可實現搜尋的多樣性,有利於獲得最優的路徑。當枝幹生長到滿足可分枝年齡時,採用隨機的方式對是否分枝進行判斷。分枝後新芽的生長方式根據原芽的光強分布,在光強較大的幾個方向中隨機取其中之一作為新芽的光強矢量。
套用實例
根據上述算法設計,採用C語言進行算法的代碼實現,並採用Visual C++進行了人機互動界面設計,具有地圖編輯,計算參數設定,算例初始化,算例圖形化顯示,計算結果顯示和導出功能。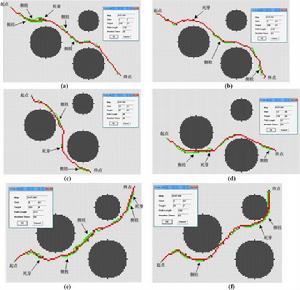
紅色單元格表示植物的主桿,即最先到達終點的枝幹,作為路徑規划算法的計算結果。綠色單元格表示植物生長過程中的其他枝幹,由於受到主桿“頂端優勢”的抑制生長速度較慢,或者由於路徑的障礙導致該側枝停止生長,即“死芽”的產生,如上圖中紫色單元格所示。
