
飛機導航系統
正文
確定飛機的位置並引導飛機按預定航線飛行的整套設備(包括飛機上的和地面上的設備)。發展概況 早期的飛機主要靠目視導航。20世紀20年代開始發展儀表導航。飛機上有了簡單的儀表,靠人工計算得出飛機當時的位置。30年代出現無線電導航,首先使用的是中波四航道無線電信標和無線電羅盤。40年代初開始研製超短波的伏爾導航系統和儀表著陸系統(見無線電控制著陸)。50年代初慣性導航系統用於飛機導航。50年代末出現都卜勒導航系統。60年代開始使用遠程無線電羅蘭C導航系統,作用距離達到2000公里。為滿足軍事上的需要還研製出塔康導航系統,後又出現伏爾塔克導航系統及超遠程的奧米加導航系統,作用距離已達到10000公里。1963年出現衛星導航,70年代以後發展全球定位導航系統。
導航方法 導航的關鍵在於確定飛機的瞬時位置。確定飛機位置有目視定位、航位推算和幾何定位三種方法。
①目視定位:由駕駛員觀察地面標誌來判定飛機的位置,這在起飛和著陸過程中特別需要。
②航位推算:根據已知的前一時刻飛機位置和測得的導航參數推算當時飛機的位置。例如根據測出的真實空速和飛機的航向,在給定風速和風向條件下利用航行速度三角形計算出地速(見飛行速度、儀表導航),再把地速對時間進行積分,代入起始條件──前一時刻的位置,即可得到當時的飛機位置。都卜勒雷達能直接測出地速和偏流角,經過積分也可得到飛機的位置。慣性導航實質上也是進行航位推算,由慣性元件測得加速度,經過兩次積分得到位置信息。航位推算是近代導航的主要方法,利用這種方法的導航系統只依靠飛機上的儀器而與外界無關,且不易受無線電干擾,可進行全球導航。
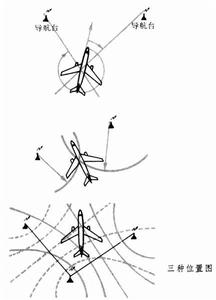
③幾何定位:以某導航點為基準確定飛機相對於導航點的位置,從而定出飛機的位置線(即某些幾何參數如距離、角度保持不變的航跡)。再確定飛機相對於另一導航點的位置,定出另一條位置線。兩條位置線的交點就是飛機所在的位置。圖中示出三種位置線:相對方位角為恆值的位置線是一條通過導航點的直線;距離為恆值的位置線是以導航點為中心的圓周;到兩個導航點的距離差為恆值的位置線是雙曲線。也可用雷達來確定飛機的位置。
 飛機導航系統
飛機導航系統①儀表導航系統:利用飛機上簡單儀表所提供的數據通過人工計算得出各種導航參數。這些儀表是空速表、磁羅盤、航向陀螺儀和高度表等。後來由人工計算發展為自動計算而有了自動領航儀。各種簡單儀表也逐漸發展成為航向姿態系統和大氣數據計算機等。
②無線電導航系統:利用地面無線電導航台和飛機上的無線電導航設備對飛機進行定位和引導。無線電導航系統按所測定的導航參數分為5類:測角系統,如無線電羅盤和伏爾導航系統;測距系統,如無線電高度表和測距器(DME);測距差系統,即雙曲線無線電導航系統,如羅蘭C導航系統和奧米加導航系統;測角測距系統,如塔康導航系統和伏爾-DME系統;測速系統,如都卜勒導航系統。作用距離在 400公里以內的為近程無線電導航系統,達到數千公里的為遠程無線電導航系統,1萬公里以上的為超遠程無線電導航系統和全球定位導航系統。全球定位導航則藉助於導航衛星(見“導航星”全球定位系統)。此外,利用定向和下滑無線電信標可組成儀表著陸系統。
③慣性導航系統:利用安裝在慣性平台上的,3個加速度計測出飛機沿互相垂直的3個方向上的加速度,由計算機將加速度信號對時間進行一次和二次積分,得出飛機沿3個方向的速度和位移,從而能連續地給出飛機的空間位置。測量加速度也可不採用慣性平台,而把加速度計直接裝在機體上,再把航向系統和姿態系統提供的信號一併輸入計算機,計算出飛機的速度和位移,這就是捷聯式慣性導航系統。
④天文導航系統:以天體(如星體)為基準,利用星體跟蹤器測定水平面與對此星體視線間的夾角(稱為星體高度角)。高度角相等點構成的位置線是地球上的一個大圓。測定兩個星體的高度角可得到兩個大圓,它們的交點就是飛機的位置。
⑤組合導航系統:由以上幾種導航系統組合起來所構成的性能更為完善的導航系統。
參考書目
勞里拉著,邱醒亞譯:《電子測量與導航》,地質出版社,北京,1983。S.H.Laurila,Electronic Surveyingand Navigation,John Wiley & Sons,New York,1976.
