位移感測器原理分類
①光學式位移感測器(智慧型感測器ZX-L-N系列等)概要
光源發出的光通過透鏡進行聚光,並照射到物體上。物體發出的反射光通過受光透鏡集中到一維的位置檢測元件(PSD)*上。如果物體的位置(距離測定器的距離)發生變化,PSD上成像位置將不同;如果PSD的兩個輸出平衡發生變化,PSD上的成像位置將不同,PSD的兩個輸出平衡會再次發生變化。
如果將這兩個輸出作為A、B,計算A/(A+B),並加上適當的拉線係數‘k’和殘留誤差‘C’,可求得

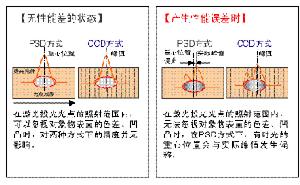
PSD方式與CCD(CMOS)方式
PSD方式的原理特長:
將對象物上的光點光束投影到受光元件上時的重心位置換算為距離CCD(CMOS)方式的原理特長:
分別檢測對象物上的光點光束投影到受光元件上時的CCD(CMOS)的各像素的光量,並換算為距離。
CMOS圖像感測器 | CCD圖像感測器 | |
讀取方式 | 分別讀取每個像素的信號,進行擴大。 | 用存儲繼電器方式分別讀取每個像素信號,最後進行擴大。 |
優點 | 消耗功率小。容易高速化。能使運算電路等一體化。 | 畫質好。實際使用長。 |
缺點 | 需要設法控制每個像素的分散。靈敏度約為CCD的1/5。 | 消耗功率大。(高速化困難)。生產過程複雜。(成本高) |
套用 | 如不使用CMOS,則難以進行物體識別、動態物體檢測、距離感測器、超高速攝像和累積時間適應。圖像壓縮、累積時間適應和大型動態範圍攝像是CMOS的擅長領域。 | 靜止畫面百萬像素N圖像讀入。 |
正反射方式和擴散反射方式
正反射方式 | 擴散反射方式 | |
直接接受來自物體的正反射光的方式,對金屬等表面有光澤的檢測體也能穩定測量。 | 投光光束面對測定面垂直投光,並接受反射光中的擴散反射光的方式,可以擴大測定範圍。 | |
線性接近感測器(智慧型感測器ZX-E系列等)
③超音波位移感測器由送波器向對象物傳送超音波,通過受波器來接收其反射波。通過計算超音波從傳送到接收為止所需的時間與音速之間的關係,來計算距離的方式。
位移感測器術語解說
本頁是關於「光學式線性感測器」的術語說明。採用其他方式、原理的感測器的「術語」,請參見相應各機型的登載頁。
解析度
在測定對象物靜止時,以距離來換算線性輸出的擺動幅度,區別在數字輸出時數據偏差的幅度和解析度,稱為重複精度。直線性(線性)
線性輸出相對於理想直線的誤差。通常將其與整個測定範圍(Full Scale:FS)相比,以百分比的形式來表示,如1%FS…。
對應環境溫度變化的線性輸出變動量。
通常將其與整個測定範圍(Full Scale:FS)相比,以□%FS/℃的形式來表現。例)0.03%FS/℃(FS=20mm)
回響時間
物體的位移和寬度是在步進變化時的線性輸出。為了使模擬輸出在10~90%內變化,以「回響時間」來表現所需的時間。回響時間與解析度
下圖為一般的「位移」「回響時間」「解析度」的關係。
(這時回響性降低)
希望得到快速回響性時,請加快回響時間的設定。
(這時解析度降低)
