
裝配機器人
正文
專門為裝配而設計的機器人。與一般工業機器人比較,它具有精度高、柔順性好、工作範圍小、能與其他系統配套使用等特點。使用裝配機器人可以保證產品質量,降低成本,提高生產自動化水平。基本類型與結構 常用的裝配機器人主要有可程式通用裝配操作手 (Programmable Universal Manipula-tor for Assembly)即 PUMA 機器人和平面雙關節型機器人 (Selective Compliance Assembly Robot Arm)即SCARA 機器人兩種類型。
PUMA 機器人 美國 Unimation 公司1977年研製的PUMA是一種計算機控制的多關節裝配機器人。一般有 5或6個自由度,即腰、肩、肘的迴轉以及手腕的彎曲、鏇轉和扭轉等功能(圖1)。其控制系統由微型計算機、伺服系統、輸入輸出系統和外部設備組成。採用VALⅡ作為程式語言,例如語句“appro PART,50”表示手部運動到PART上方50mm處。PART的位置可以鍵入也可示教。VAL具有連續軌跡運動和矩陣變換的功能。
 裝配機器人
裝配機器人 裝配機器人
裝配機器人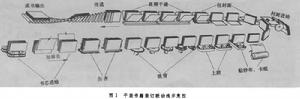 裝配機器人
裝配機器人柔順性 裝配機器人的大量作業是軸與孔的裝配,為了在軸與孔存在誤差的情況下進行裝配,應使機器人具有柔順性。主動柔順性是根據感測器反饋的信息而從動柔順心則利用不帶動力的機構來控制手爪的運動以補償其位置誤差。例如美國Draper實驗室研製的遠心柔順裝置RCC(Remote Center Compliance device)(圖3),一部分允許軸作側向移動而不轉動,另一部分允許軸繞遠心(通常位於離手爪最遠的軸端)轉動而不移動,分別補償側向誤差和角度誤差,實現軸孔裝配。
套用 裝配機器人主要用於各種電器製造(包括家用電器,如電視機、錄音機、洗衣機、電冰櫃、吸塵器)、小型電機、汽車及其部件、計算機、玩具、機電產品及其組件的裝配等方面。
