
概念
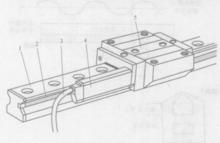 圖1 磁阻位移測量
圖1 磁阻位移測量磁阻位移測量裝置具有很好的持久精度,不僅簡化了位移感測器的結構,便於裝配和調整,導軌除了導向和支承功能外,還具有直線位移測量功能。
磁阻位移測量裝置工作原理
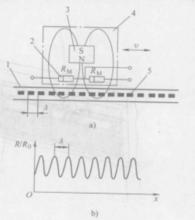 圖2 測量原理a)組成,b)波形
圖2 測量原理a)組成,b)波形如圖2所示,磁性標尺緊貼在導軌側壁上,並隨導軌固定在工具機床身上;檢測頭固定在滑塊上,檢測頭中有磁敏電阻和信號處理電路等,滑塊和工作檯等移動部件連線在一起。當工作檯移動時。檢測頭將位移信號通過電纜輸出。圖2所示為磁阻位移測量裝置的工作原理。
在圖2a中,磁性標尺上的磁性材料按一定間距λ排列,檢測頭磁鐵產生的磁力線穿過兩個磁敏電阻尺R,與標尺上的磁性材料構成磁迴路。因為磁性材料呈斷續分布,檢測頭在運動過程中,磁敏電阻上的磁場強度發生改變,所以磁敏電阻的阻值也隨之變化。每移動一個λ距離,阻值變化一次,如圖2b所示。磁敏電阻的變化值經信號處理電路整形、放大,轉換成脈衝信號,作為位移測量信號。兩個磁敏電阻相距1/4λ的整數倍,使各自輸出的脈衝相位差90°,用於辨向。
因為磁阻位移測量裝置中的磁敏電阻不需要複雜的交流激勵源,和磁柵相比,具有很高的回響速度,很適合在高速數控工具機中進行位移測量。
基於磁阻感測器的非接觸式位移測量
力矩信號是塔機安全監控中最重要的參數,它直接影響塔機的安全,監控力矩是否超載是防止塔機司機誤操作及疏忽操作而引起塔機惡性事故的保障。國產塔機普遍採用的是機械式力矩限制器。只能在起重力矩達到極限值時觸動限位開關達到保護作用,不能顯示起重力矩值。通過測量弓形板式力矩限制器弓形板的位移量可以間接測出起重力矩,實現塔機起重力矩線上監測。
位移測量的精度和穩定性直接影響起重力矩測量的準確性。而傳統的位移感測是接觸式的,像直線電位計等,接觸部分經常會磨損、氧化,影響測量精度。光電式位移感測器價格高,受環境影響大。因此研究選用磁阻位移感測器。磁阻感測器體積小,精度高,抗干擾能力強,非接觸式測量,不會磨損,而且價格低。正在被越來越廣泛地使用。
各向異性磁阻感測器的工作原理
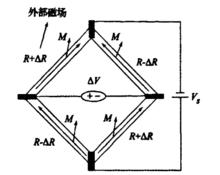 圖3 惠斯通電橋
圖3 惠斯通電橋對於強磁性金屬(鐵、鈷、鎳及其合金),當外加磁場平行於磁體內部磁化方向時,電阻幾乎不隨外加磁場而變;當外加磁場偏離金屬的內磁化方向時,金屬的電阻減小,這就是各向異性磁電阻效應。
HMCl501是Honeywell公司開發的磁阻感測器,是由磁阻合金薄膜組成的惠斯通橋電阻電路(如圖3所示)。當電阻中有電流流過時,在電橋上施加一個偏置磁場M,這將使得兩個相對放置的電阻的磁化方向朝著電流方向轉動,從而引起電阻阻值的增加;另外兩個相對放置的電阻的磁化方向背向電流方向轉動,從而引起電阻阻值減小。當外部磁場的磁場強度大於80高斯時,磁場飽和,磁阻感測器只對所加磁場的方向敏感。
直線位移測量的實現
 圖4 感測器陣列
圖4 感測器陣列用一個或多個HMCl501,一個磁鋼和一套信號調理電路就可實現位移的測量。圖4所示為4個HMCl501組成的感測器列。感測器之間的間距為12.5mm,磁鋼與感測器間距12.5mm,磁鋼長度為25mm。磁鋼沿軸方向移動時,4個感測器的輸出波形如圖5所示。每個感測器輸出的最大值與最小值之間的區域是可利用的。圖4所能測的直線位移範圍大約為50.8mm。
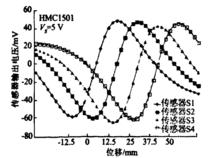 圖5 感測器列的輸出波形
圖5 感測器列的輸出波形感測器之間的距離取決於磁鋼的長度和所要求的系統精度。原則上,一旦磁鋼的長度和磁鋼與感測器陣列之間的距離確定,每個感測器的線性輸出範圍也就確定了。感測器之間的距離應該取其線性範圍的一半。因為感測器的輸出是正弦函式,所以每個感測器的線性輸出範圍也與要求的系統精度有關。感測器離得越近精度越高。感測器之間的距離確定後,所需感測器的數量由測量的長度決定。感測器數目越多,測量的位移越大。
磁鋼必須為其周圍的3個感測器同時提供飽和磁場,磁力線方向可以不一致,但X—Y平面的磁場強度之和應大於80高斯。磁鋼的幾何尺寸,在系統設計中非常重要。磁鋼的尺寸由要求的測量範圍和精確度決定。每個感測器的可用線性範圍由磁鋼沿移動方向的長度確定。磁鋼長,感測器的可用線性範圍增大,但靈敏度降低;磁鋼短,可用線性範圍減小,但靈敏度增大。
位移的計算。首先要對每個感測器進行標定,補償電橋的偏移電壓,測出每個感測器的輸出電壓峰一峰值並乘以一個縮放因子,使它們的峰一峰值範圍相同。按圖5所示確定坐標軸,X軸是位置坐標,Y是電壓坐標。固定好感測器位置,使得感測器的間距是理想的,即使得相鄰的3個感測器值分別為最高、零和最低。感測器間距為12.5mm,第一個感測器S1所在的位置是6.25mm,第二個感測器S2所在的位置是18.75mm。標定完以後,就可進行測量。計算位移時,必須先確定磁鋼的位置。當磁鋼處於某位置時。讀出4個感測器的輸出值,分別比較相鄰的兩個感測器的輸出,如果第i個感測器的輸出為正,第i+1個的輸出為負,那么磁鋼就處於第i和i+1個感測器的之間,這兩個感測器中哪個的輸出值的絕對值小,磁鋼便在哪個感測器的測量範圍內。這個感測器測出的值加上它所處的位置值就得到所要測的位移值。
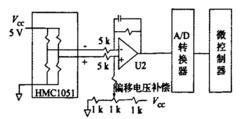 圖6 位移測量電路
圖6 位移測量電路按上述方法,如果要求的測量精度高,感測器間距必須減小,比如要達到5pm的精度,感測器間距應為2.5mm。而通常需測量的塔機弓形板式力矩限制器的弓形板的位移量為幾十毫米左右,如QTZ5012塔機弓形板的位移量為20mm。要求的精度在0.01mm以上,則需要的感測器數量要增加很多,不僅使電路的功耗增加,可靠性降低,而且成本增高。所以本文使用非線性補償的方法,充分利用每個感測器的可用測量區域,一個感測器的測量範圍就能達到25mm,測量精度也能滿足要求。測量電路如圖6所示。
基於BP網路的非線性補償
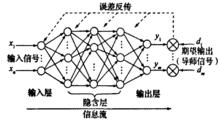 圖7 BP神經網路結構
圖7 BP神經網路結構BP神經網路是人們認識最為清楚、套用最為廣泛的一類神經網路,其性能優勢主要在非線性映射、模式識別和特徵提取等方面。BP網路能夠通過若干簡單非線性處理單元的複合映射,從理論上實現從輸入空間到輸出空間的非線性映射。
 表1 訓練樣本
表1 訓練樣本BP網路是典型的多層網路,分為輸入層、隱層和輸出層,層與層之間採用全互連方式,同一層單元之間不存在相互連線。如圖7所示1個輸出結點,隱層含有5個神經元。磁阻感測器的輸出電壓V作為BP網路的輸入,對應的位移量作為網路的輸出。使用MATLAB對該神經網路進行訓練與仿真。訓練樣本如表1所示。設定訓練次數為100次,訓練終止誤差0.001。並選擇隱含層傳輸函式為雙曲正切S型函式tansig,輸出層的傳輸函式為線性函式purelin,整個訓練經過50步即達到終止誤差。
研究結論
研究採用磁阻感測器,套用BP神經網路對感測器的輸出特性進行非線性補償,實現了位移的高精度,非接觸式測量。在實驗系統中測試效果良好,並且成本低廉、測量精度高、完全滿足起重力矩監測中位移測量的要求。
