
簡介
國內外 提出利用軟體來完成永磁同步電機轉子位置檢測,但很少涉及轉子初始位置檢測。其實,電機轉子初始位置的檢測是位置感測器調速系統中一個必不可少的環節。轉子初始位置檢測失誤,會嚴重影響轉子位置的計算,以致無法正確完成電機控制的其它一系列算法,將造成電機運轉的紊亂,使之無法進入正常運行。同時,永磁同步電機的初始位置檢測不同於正常運轉狀態下的位置檢測,後者可通過位置感測器檢測轉子的運轉來間接得出。
複合式光電編碼器檢測轉子初始位置的方法
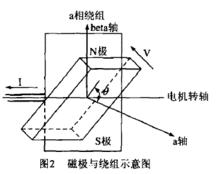
對於正弦波永磁電機,轉子磁極經精心加工,其切割定子繞組時產生正弦波感應電勢 。
 永磁同步電機轉子初始位置檢測方法
永磁同步電機轉子初始位置檢測方法實際套用較多的光電編碼器是複合式光電編碼器,複合式光電編碼器是一種帶有簡單磁極定位功能的增量式光電編碼器,它輸出兩組信息,U,V,W,A,B,Z及反相的U-V-W-A-B-Z一信號。一組用於檢測磁極位置,帶有絕對信息功能,三路彼此相差120。的、占空比為0. 5的三路脈衝信號U,V,W;另一組完全同增量式光電編碼器,輸出三路方波脈衝A,B和Z0A,B兩路脈衝相位差900,這可以判斷轉向,Z脈衝每轉一個,用於基準點定位。U,V,W信號用於永磁同步伺服系統轉子磁極的初始定位。
值得注意的是:複合式光電編碼器的極對數要與電機的極對數一致,轉子旋轉一周編碼器U,V,W相中任一相就發出與極對數相同的脈衝個數。使用一台四通道的示波器可得到轉子初始位置與U,V,W相電平組合的對應關係。通道1探針連線U相,地連線V相;通道2,3,4探針分別連線編碼器的U,V,W相,地連線編碼器的地;編碼器加上電源,面對電機前端反時鐘方向轉動電機。第一行正弦波為電機作為發電機時U相和V相繞組間的感應電勢,第2,3,4行是編碼器U,V,W相發出的方波電平信號,橫軸表示轉子轉過的電角度。根據U,V,W相的電平高低的組合可知轉子的區間範圍。根據U,V,W的3位信號,可以將轉子位置確定在60。電角度的範圍里。,當U,V,W讀數在100時,則取其角度為0-60。區間的中間位置(即300),這樣轉子的位置誤差不會超過300電角度。
有感測器位置檢測技術
轉子位置檢測技術分有感測器檢測技術和無感測器檢測技術。有感測器位置檢測技術主要指通過在系統中加裝位置檢測感測器來檢測轉子位置的方法。有感測器位置檢測技術根據所添加位置感測器的不同又可分為旋轉變壓器檢測技術、光電編碼盤檢測技術、解算器檢測技術等,其中旋轉變壓器檢測技術、光電編碼盤檢測技術最為常用 。
旋轉變壓器檢測技術
旋轉變壓器是電機常用檢測元件之一,旋轉變壓器分正餘弦旋轉變壓器、線性旋轉變壓器、比例式旋轉變壓器等。
 永磁同步電機轉子初始位置檢測方法
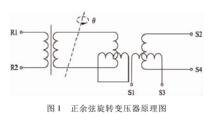
永磁同步電機轉子初始位置檢測方法正餘弦二對極無刷式旋轉變壓器原理如圖1所示,R1R2為勵磁繞組,S1 S3, S2 S4為定子輸出繞組。工作時若在R1、2兩端輸入高頻交流電壓信號,產生脈振磁場,當轉子隨電機旋轉時,脈振磁場隨之旋轉,從而在定子繞組感應出與轉子位置有關的脈振電動勢。因為S1 S3 , S2 S4兩套繞組互相垂直,輸出信號相位差90°,形成隨轉子位置變化的正餘弦信號,其輸入輸出關係為 旋轉變壓器在性能上可靠性高,有較強的抵抗外界惡劣環境的能力,但需要設計複雜的信號處理電路。這些信號處理電路的可靠性和精度對轉子位置檢測有很大影響,並且造價昂貴導致成本大幅增加,限制了旋轉變壓器的套用範圍 。
光電編碼器檢測技術
光電編碼器是套用比較廣泛的位置檢測元件。光電編碼器分為絕對式光電編碼器、增量式光電編碼器和混合型光電編碼器。其中在工程上套用較廣的是絕對式光電編碼器和增量式光電編碼器 。
無感測器位置檢測技術
通過安裝檢測元件來檢測轉子位置的方法需要一定的空間位置,增加了系統成本和複雜性,降低了可靠性和抗干擾能力。無位置感測器技術主要包括反電動勢檢測技術、高頻信號注入調製技術等 。
高頻信號注入檢測技術
高頻信號注入法主要是利用電機的凸極效應來檢測轉子位置。利用注入旋轉高頻信號引起電機d,q軸磁路飽和程度的差異,實現轉子位置的檢測,同時根據定子鐵心的非線性磁化特性判斷永磁體的N/S極極性(此方法更適用於凸極率較高的PMSM);也可以利用脈振高頻信號注入結合查表法獲取轉子位置,並利用磁場飽和引起的電感量的變化來辨識磁極極性(此方法更適用於表面安裝的PMSM)。當注入高頻電壓信號頻率遠高於額定基波頻率時,電機的感抗取決於自感。忽略定子電阻和永磁極磁鏈的影響,注入高頻激勵下的電機模型定子電壓和磁鏈方程為
 永磁同步電機轉子初始位置檢測方法
永磁同步電機轉子初始位置檢測方法智慧型檢測技術
PMSM數學模型是非線性的,且存在大量不確定因素影響對電機位置的檢測,如參數攝動、逆變器輸出含有高頻諧波及其他干擾信號等。模糊控制技術是解決系統不確定因素的有效方法,而人工神經網路的自學習功能是解決系統非線性辨識和控制的有效手段。將徑向基函式(RBF)神經網路套用於PMSM無位置感測器控制系統中,該方法中RBF神經網路在高、低速情況下都能很好地估計出轉子位置,並具有良好的動態回響和調節能力。黃慶等圈提出一種基於模糊自抗擾理論的PMSM無位置感測器控制系統,設計了速度環的二階模糊自抗擾控制器,電流環的一階模糊自抗擾控制器,使系統具有良好的動、靜態性能和轉速辨識能力,調速範圍寬,對負載擾動具有較強的魯棒性 。
總結
在PMSM控制系統中,轉子位置檢測直接影響到控制性能。常用的方法是採用位置感測器來檢測轉子位置,但是位置感測器增加了系統的成本,降低了系統的可靠性,並且其套用也受到環境條件的限制,從而限制了電機的套用範圍。反電動勢無感測器檢測技術計算簡單、控制有效,但在低速時對定子電壓和電流值的變化十分敏感,無法估計出轉子的初始位置。高頻信號注入檢測技術的轉子位置與轉速無關,克服了反電動勢法的缺陷。智慧型檢測技術具有良好的動、靜態性能和轉速辨識能力,調速範圍寬,對負載擾動具有較強的魯棒性 。
