
簡介
物體的形狀識別是 模式識別的重要方向,在計算機中物體的形狀有多種表示方式,基於不同的形狀表示方式,提出了多種形狀識別方法,如基於傅立葉描述子、主分量分析、不變性距等方法。在形狀識別中,識別所基於的模式特徵非常重要。
隨著多媒體技術、計算機通信技術及網路的迅速發展,人們在生活中廣泛地套用性能俱佳的電子設備,也接觸到更多的需要去處理的數字圖像信息。
數字圖像的識別技術已經日益廣泛套用在我們生活和工作中各個方面安全等等。因此,圖像目標識別具有重大研究意義,獲得的研究成果套用前景非常廣闊。分析研究 形狀識別在圖像目標識別中發揮出重要作用,形狀特徵匹配的好差直接決定了目標識別的效果。
形狀識別的一般流程
形狀識別的一般流程:形狀提取、形狀特徵提取和分類識別。
一、形狀提取
形狀提取的處理流程:
 形狀識別
形狀識別1、 預處理:
A、 圖像的灰度變換是圖像增強處理技術中一種非常基本、直接的方法,它主要針對獨立的像素點進行變換處理,而無須考慮其它因素,在處理時通過改變原始圖像數據所占據的灰度範圍而使其灰度分布滿足一定的要求,並且絲毫不會改變圖像像素點之間的相互空間關係。常用的方法主要有三種:
1)灰度級修正
針對圖像成像不均勻(如曝光不均勻,使圖像半邊暗半邊亮),對圖像逐點進行不同程度的灰度級校正,目的是使整幅圖像灰度均勻。
2)灰度變換
針對圖像某一部分或整幅圖像曝光不足而使用的灰度級變換,其目的是增加圖像灰度對比度。常用的灰度變換方法有圖像反轉、線性灰度變換、分段線性灰度變換、灰度視窗變換等,如圖:
 形狀識別
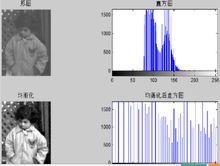
形狀識別3)直方圖修正
能夠使圖像具有所需要的灰度分布,從而有選擇地突出所需要的圖像特徵,來滿足人們的需要。灰度級的直方圖就是反映一幅圖像中的灰度級與出現該灰度機率之間關係的圖形。直方圖的均衡化就是一種常用的直方圖修正法,它通過把一已知灰度分布的圖像經過一種變換,使之演變成一幅具有均勻灰度機率分布的新圖像。
 形狀識別
形狀識別B、 圖像平滑是一類局部預處理方法,主要用於抑制圖像噪聲,它利用了圖像數據的冗餘性。局部圖像平滑可以有效地消除衝擊噪聲或表現為窄帶的退化。新值的計算基於某個鄰域中亮度的平均。平滑有造成圖像中明顯邊緣變的模糊的問題,因此我們將集中考慮能夠保持邊緣的平滑方法。
1)鄰域平均法
2)中值濾波
2 、形狀提取(分割):
通過分割區域來提取形狀主要是基於區域的某種“一致性”,在實際圖像中,如:灰度,紋理,光流等分布的一致性。這種一致性構成的特徵可用於區分圖像的各個區域。
1)基於邊緣檢測的方法
圖像邊緣是圖像最基本的特徵,邊緣在圖像分析中起著重要作用。所謂邊緣,是指圖像局部特性的不連續性。灰度或結構等信息的突變處稱為邊緣,例如:灰度級的突變、顏色的突變、紋理結構的突變等。
從本質上說,邊緣常常意味著一個區域的終結和另一個區域的開始。 邊緣檢測的實質是採用某種算法來提取出圖像中對象與背景間的交界線。圖像灰度的變化情況可以用圖像灰度分布的梯度來反映,因此可以用局部圖像微分技術來獲得邊緣檢測運算元。經典的邊緣檢測方法是對原始圖像中像素的某小鄰域來構造邊緣檢測運算元。
邊緣檢測的原理是:由於微分運算元具有突出灰度變化的作用,對圖像進行微分運算,在圖像邊緣處其灰度變化較大,故該處微分計算值較高,可將這些微分值作為相應點的邊緣強度,通過閾值判別來提取邊緣點,即如果微分值大於閾值,則為邊緣點。
2)基於閾值選取的方法
閾值法是一種傳統的圖像分割方法,因其實現簡單、計算量小、性能較穩定而成為圖像分割中最基本和套用最廣泛的分割技術。圖像閾值分割利用了圖像中要提取的目標物與其背景在灰度特性上的差異,把圖像視為具有不同灰度級的兩類區域(目標和背景)的組合,選取一個合適的閾值,以確定圖像中每一個像素點應屬於目標還是背景區域,從而產生相應的二值圖像。
1. 整體閾值法:
它是用一個全局閾值來實現圖像二值化。該方法對質量較好的圖像(如雙峰直方圖)有效。這種方法運算簡單,易於理解,但適應性不強。
2. 局部閾值法:
由當前象素灰度值與該象素周圍點的局部灰度特徵來確定圖像的閾值。常把原圖像劃分為不相交的小塊,將各塊圖像的灰度值作為該部分圖像的閾值。這種方法可處理質量較差的圖像。
3. 動態閾值法:
它是局部閾值法的改進方法。它的閾值不僅僅取決於該象素及其周圍象素的灰度值,還和該象素的位置有關。這種方法適應於圖像質量不好的圖像的二值化,但它運算量大,運算速度慢。
3)基於區域生成的方法
閾值分割可以認為是將圖像由大到小進行拆分,而區域生長則相當於有小到大對像素進行合併。區域生長的基本思想是將具有相似性質的像素集合起來構成一個區域。實質就是將具有“相似”特性的像素元連線成區域。這些區域是互不相交的,每一個區域都滿足特定區域的一致性。具體實現時,先在每個分割的區域找一個種子像素作為生長的起始點,再將種子像素周圍鄰域中與種子像素相同或相似性質的像素(根據某種事先確定的準則來判定)合併到種子像素所在的區域中。直到所有滿足條件的像素都包括進來了,一個區域就長成了。 實際套用區域生長法時,需要有以下 3 個步驟:
(1)確定選擇一組能正確代表所需區域的起始點種子像素。
(2)確定在生長過程中將相鄰像素包括進來的準則。
(3)確定區域生長過程停止的條件或準則。
3 、提取後處理:
形態學運算是針對二值圖像而依據數學形態學(MathematcialMorpholgoy)的集合論發展起來的圖像處理方法。
二、形狀特徵提取
過圖像的前期處理,我們獲得了目標的形狀,為了進一步對目標做分析和識別,必須通過對目標的形狀作定量和定性的分析來得出正確的結論,這些結論是建立在目標形狀的某些特徵描述的基礎上的。為了識別某一目標,我們必須對目標的形狀進行描述,即提取形狀的某些特徵來表示該目標。為了能區分不同形狀的物體,保證識別的正確性,我們希望這些特徵相對不同的形狀有較大的差異,而對同一物體,對其在圖像中的不同位置、大小和方向的變化保持不變,即具有平移(Translation)、旋轉(Rotation)、尺度(Scale)不變性(RST不變性)。
好的描述具有如下性質:
1)寬域:能描述許多類的實體;
2)唯一性:對域中每個不同的成員有唯一的表達;
3)數據保持性:即能根據描述恢復出初始形狀的真實表示;
4)穩定性:小的擾動不會使描述產生大的變化;
5)簡易性:實現簡便,實時性。
1、基於全局的簡單幾何性特徵:
面積、周長、長軸、短軸、主軸方向、凹凸面積、緊密度、實心度、偏心率。
1)離心率:區域的離心率定義為它的主軸和短軸的比,它區分不同寬度目標的能力比較強。長而窄的物體和短而寬的物體偏心率差別很大。
2) 實心度:當形狀有一個或多個明顯的凹凸時,實心度就是一個非常有用的特徵,可以刻畫一個區域的凹凸性。任意集合O的凸殼H就是包含集合O的最小凸包,實心度定義為在H同時也在集合O中像素的數目的比率。實心的目標和空心的目標在實心率上差別很大。
3)緊密度:緊密度是在一定程度上描述區域緊湊型的全局性形狀測度,由
 形狀識別
形狀識別給出。當形狀為圓時,緊密度為最小值1,它是一個旋轉、尺度、平移不變數,又是一個非矢量的數值。
2、基於變換域的特徵:
矩、Fuorier描述子、小波描述子
1)矩
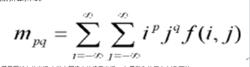
區域的矩表示把一個歸一化的灰度級圖像函式理解為一個二維隨機變數的機率密度。這個隨機變數的屬性可以用統計特徵—矩(Momnet)來描述。通過假設非零的像素值表示區域,矩可以用於二值或灰度級的區域描述。(p十砂階矩不依賴於尺度、平移、旋轉、甚至灰度級上的變換,由下式給出:
 形狀識別
形狀識別在數字圖像中我們計算求和式:
 形狀識別
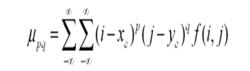
形狀識別其中x、y、i、了是區域點的坐標(在數字圖像中的像素坐標)。如果我們使用中心矩,可以
取得平移不變性,
 形狀識別
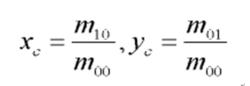
形狀識別其中xc和y。是區域重心(質心)的坐標,它可以有下面的關係來得到:
 形狀識別
形狀識別在二值情況下, m表示區域面積。尺度不變性的特徵也可以在尺度中心矩 η中得到(尺度變換x`=αx,y`=αy)。
 形狀識別
形狀識別由上式求出一組歸一化的中心矩 η,通過代數恆等變換,我們可以求得下式的一組7個具有RST不變性的特徵(注意Ф只具有ST不變性):
 形狀識別
形狀識別2)邊界Fourier描述子:
假設C是複平面上的封閉曲線(邊界)。以逆時針沿著這個曲線保持恆定速度移動,得到一個複函數z(t),這裡t是時間變數。速度應該選擇為使得環繞邊界一周的時間為2π;然後沿曲線做多次遍歷得到一個周期為2π的周期函式。這就允許Z(t)的傅立葉表示:
 形狀識別
形狀識別級數的係數T稱為曲線C的傅立葉描述子。
考慮將曲線距離、對照於時間會更有用。其中L是曲線長度。
 形狀識別
形狀識別傅立葉描述子T由
 形狀識別
形狀識別給出。描述子受曲線形狀及曲線初始點的影響。對於數字圖像數據,邊界坐標是離散的而函式或Z(t)不是連續的,這樣當採用直角坐標表示時,一條由(2N+l)個採樣點組成的長度為L的封閉曲線,可用下面的傅立葉級數表示:
 形狀識別
形狀識別三、分類識別
圖像分類識別根據圖像的不同特徵對圖像進行分類,有相同特徵的歸為一類。圖像識別方法隨著數學算法的不斷進步而不斷發展。目前,圖像分類識別的主要方法有六種:模糊集識別、統計識別、神經網路識別、結構識別、魔板匹配和支持向量機。
