
偽微分反饋控制策略
 偽微分反饋控制
偽微分反饋控制 偽微分反饋控制
偽微分反饋控制 偽微分反饋控制
偽微分反饋控制偽微分反饋控制策略如圖1所示,其反饋環節為 ,並引入積分環節 來確保系統的閉環回響中不存在靜態誤差。系統外反饋迴路中的 用來調節系統輸出的幅值。由於偽微分反饋控制的前向通路是由單一的積分環節驅動,而微分環節是對較為平滑的輸出信號作用的,所以並不存在傳統PID控制中的微分突變現象,有著較好的控制效果。
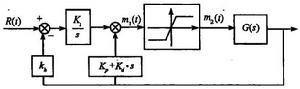 圖1 偽微分反饋控制策略
圖1 偽微分反饋控制策略 偽微分反饋控制
偽微分反饋控制為了保證進入對象環節的信號 不至於過大,在受控對象前還加入了一個飽和限幅的非線性環節。由實驗結果看,儘管做了這樣的假設,設計出來的PDF控制器仍然是很令人滿意的。
PDF調節器參數整定
如果輸入的信號足夠小,使得該信號在後面的飽和非線性環節中的線性段內工作,我們則可將系統等效為一般的線性系統。而在超精密數控加工中,由於插補間隔已經極小化,可以認為輸入的信號幅值是足夠小的。
假設受控對象環節為二階線性傳遞函式
 偽微分反饋控制
偽微分反饋控制對上述模型如果想保證所有的閉環極點都為負實數,且能獲得最快速的閉環回響,則PDF調節器參數算式為
 偽微分反饋控制
偽微分反饋控制 偽微分反饋控制
偽微分反饋控制 偽微分反饋控制 偽微分反饋控制
偽微分反饋控制 偽微分反饋控制式中, , 為系統調節時間, 可以根據實際情況確定。
在實際套用中,系統的模型可能是高階的,因此需要對模型進行一些處理。模型降階技術現已比較成熟,通過採用模型降階方法,可以獲得合適的系統降階模型,並由此確定PDF調節器的參數。在閉環控制下,基於模型降階處理設計出來的PDF調節器的行為仍然是令人滿意的。這也從一個側面說明了PDF調節器對系統模型具有很強的魯棒性。
由於PDF調節器對各項參數的變化不是非常敏感,通常根據系統模型獲得的調節器參數就可以獲得良好的控制效果。
 偽微分反饋控制
偽微分反饋控制綜上所述,得到PDF控制器參數為: 。此外,由於PDF控制器的參數比較少,因此在
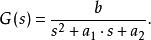
沒有獲得系統模型的情況下,也可以通過湊試法獲得合適的PDF控制器參數。圖2給出了PDF控制下的閉環階躍回響和方波跟蹤的仿真曲線。
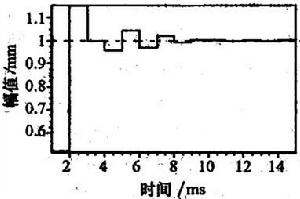 圖2(a) PDF控制下的閉環階躍回響的仿真曲線
圖2(a) PDF控制下的閉環階躍回響的仿真曲線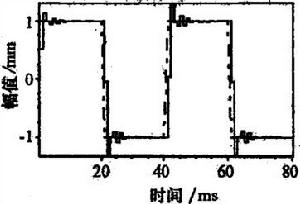 圖2(a) PDF控制下方波跟蹤的仿真曲線
圖2(a) PDF控制下方波跟蹤的仿真曲線PDF控制曲線跟蹤仿真
與PID控制的仿真曲線對比可以看出,PDF控制的回響時間有所減少,但超調量卻有所增加,在穩定後,PDF控制的振盪幅度遠遠小於PID控制。這正好說明了PDF控制回響快、跟蹤準確的特點。
