集成
 仿人型殘疾人假手系統
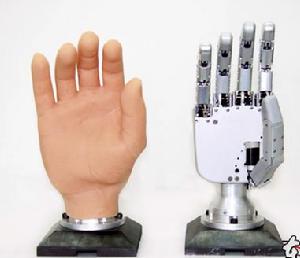
仿人型殘疾人假手系統哈工大機器人研究所課題組研製的殘疾人假手樣機由5個手指組成,大小與成年人手相仿,總重量約500克。整個假手由3個電機驅動,拇指和食指各由1個電機驅動,其餘3個手指採用1個電機驅動。
單電機驅動的新型拇指機構具有擬人的空間運動軌跡,單電機驅動的中指、無名指和小指對被抓握物體的形狀具有適應性。研究成果基於機電一體化設計思想,實現了假手機構、感測、驅動和控制系統的高度集成。
套用
這款“五指仿人手”手樣機可以輕鬆實現抓、握、捏、敲等動作,可幫助手殘疾人的生活實現部分自理。由於中國肢體殘疾人眾多,因此假手產品套用前景廣泛。
