概述
本項目致力於對2000年以來世界範圍內的主要特種移動機器人進行信息收集、數據分析和資料整理。建立的資料庫力圖對工作環境類似的移動機器人進行橫向比較,從而掌握機器人科技發展的新動向,為我院系發展特種機器人提出參考性建議,同時也促進多種機器人研究思想的融合貫通。未來還可以在已經建立的資料庫基礎上,運用系統工程、運籌學的原理,發展出輔助特種機器人設計研發的智慧型決策系統。
成員
指導老師
任憑成員
蔡楊,況滿鑫研究方法
閱讀發表於機器人學主要學術會議和學術期刊的英文原始論文,從中摘取特種機器人的工作原理,工作環境,現有性能指標等關鍵信息,並將各種信息分門類保存。整理好的資料以英文網站的形式公布。資料收集的時間範圍暫時定為2000年以來,來源主要包括著名的國際性機器人學術會議,例如:
IEEEInternationalConferenceonRoboticsandAutomation
IEEE/RSJInternationalConferenceonIntelligentRobotsandSystems
ASMEInternationalDesignEngineeringTechnicalConferences;
著名學術期刊,例如:
InternationalJournalofRoboticsResearch
IEEETransactiononRobotics
ASMEJournalofMechanismsandRobotics
JournalofFieldRobots;
綜合性機器人學專著SpringerHandbookofRobotics;
中文教科書文獻以及網際網路上有影響力的科技網站。
對於收集到的信息,可以運用質量機能展開的方法進行初始分析。建立各種特種移動機器人與各種工作環境之間的對應關係。以在某一種特定環境下正常作業為目標,探索評估特種機器人機動性的質量指標。
研究成果
雙足式
| Name | Institution(s) | Characteristics (特徵) | Operation Environment | Locomotion | Prototype |
| HRP-2 | AISTJapan | 1.5mtall,58kg bipedal,designed foruseinhuman environmentslike homes,offices,and constructionsites | Ground | Walking |  HRP-2 humanoid robot HRP-2 humanoid robot |
| HumanoidRobot Navigation | Theabilityofthesebipedalhumanoidrobotstostepoverandontoobstaclesmakesthemideallysuitedfor environmentsdesignedforhumans | Ground | bipedal walking |  |
滑翔式
| Name | Institution(s) | Characteristics | Operation Environment | Locomotion | Prototype |
| MALV1 | BioRobotsLLC, USA | 118grams,cruising airspeedof approximately11 meters persecond,surmount obstaclesof maximumheight 4.4centimeters | Air&Ground | Flying/ Walking /Leg-Wheel Hybrid |  118 gram MALV 1 118 gram MALV 1 |
| UnmannedAerial | ComputerVisionGroup | usesabasicLucas-Kanadetrackeralgorithm,whichsendsinformationabouttheerrorbetweenthecenteroftheobjecttotrackandthecenteroftheimage,totheFuzzycontroller. | Sky | fly |  |
| Name | Institution(s) | Characteristics | Operation Environment | Locomotion | Prototype |
| Robust MALV | BioRobotsLLC, USA; Universityof Bristol; Departmentof Mechanical andAerospace Engineering, CaseWestern ReserveUniversity | flylongdistances | Air&Ground | Flying /Walking /Leg-Wheel Hybrid |  RobustMALV RobustMALV |
魚鰭式
| Name | Institution(s) | Characteristics | Operation Environment | Locomotion | Prototype |
| AQUA | McGill University andYork University | 50by65by13 centimetersand weighsapproximate l18kilograms.Its propulsion isbasedonsix flippersthatcan providemotionin fivedegreesoffreedom | Underwater | Swimming |  AQUA AQUA |
| Multi-DOF Robotic Fish | Schoolof Mechanical andAerospace Engineering, NanyangTechnological University | aslenderbody, motorsgenerate optimized waveformalong thebody asthepropulsion | Underwater | Swimming | 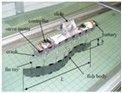 Multi-DOF Robotic Fish Multi-DOF Robotic Fish |
仿動物
| Name | Institution(s) | Characteristics | Operation Environment | Locomotion | Prototype |
| Inch- worm Robot | SchoolofMechanical andAerospaceEngineering, SeoulNationalUniversity | maximumvelocityof therobotis5mm/s, 5mmperstroke, Omegamotion, SMAactuators | Ground | Crawling |  Inchworm Robot Inchworm Robot |
| Mini- RoACH | DepartmentofElectrical Engineeringand ComputerSciences, Universityof CaliforniaBerkely | 2.4grams,driven byasingleDCmotor, 10bodylengths persecondonlevel terrain | Ground | Walking /Hexapedal | 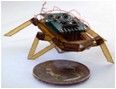 Mini-RoACH Mini-RoACH |
| RoACH | DepartmentofElectrical Engineering andComputerSciences, Universityof CaliforniaBerkely | 15grams,drivenbya singleDC motor,10bodylengths persecondon levelterrain | Ground | Walking /Hexapedal |  RoACH RoACH |
| DASH | DepartmentofElectrical Engineering andComputerSciences, Universityof CaliforniaBerkely | 16grams,drivenbya singleDC motor,10bodylengths persecond onlevelterrain | Ground | Walking /Hexapedal |  DASH DASH |
| iSprawl | CenterforDesignResearch, StanfordUniversity; UniversityofPennsylvania; | bio-inspired hexapod,runsat15 body-lengthspersecond, fastlocomotionover roughterrain andofexecutingrapid turnsby changinglegthrustangles | Ground | Walking /Hexapedal | 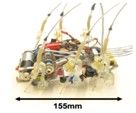 iSprawl iSprawl |
| Sticky- bot | CenterforDesignResearch, StanfordUniversity; IlliniosInstitute ofTechnology | climbssmoothvertical surfacessuchasglass, plasticandceramictile at4cm/s, employshierarchical compliance ,directionaladhesion andforcecontrol | Ground/ Vertical Surface | Climbing |  sticybot sticybot |
輪式
| Name | Institution(s) | Characteristics | OperationEnvironment | Locomotion | Prototype |
| AutomatedCropYieldEstimation | TheRoboticsInstitute | Anautonomousorchardvehicle.Thesystemscansthebothsidesofeachtree.Acomputervisionalgorithm | ground | steer |  |
| VisionGuidedMobileRobots | AutomaticControlEngineering(LSR) AdvancedStudy(IAS) | anautonomousswitching betweentwobasic attentionselection mechanisms,top-downand bottom-up,isproposed, substitutingmanual switching | Ground | steer |  |
| powersubstation equipmentinspection robot | ShandongJianzhuUniversity | formakindoffull monitorsystemfor substationtogreatly improvethesafety, dependabilityandreality ofthesubstation inspection | Ground | tumble |  |
其他
| Name | Institution(s) | Characteristics | OperationEnvironment | Locomotion | Prototype |
| Aerobot | CentreforIntelligentMachines | fullactuationtoenablesix-dofmotionandre-quirementforautonomouslocalization | air | fly |  |
| HybridMobileRobot | TheGeorgeWashingtonUniversity | Thiswasaccomplishedby integratingthelocomotionmechanismandthemanipulatorarmmechanismasone | Ground | Climbing | 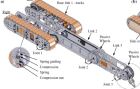 |
| Odin | changeitsphysical structureandbehavior eachtimeitisreconfigured | Ground |  | ||
| compactmagneticwheeledrobot | RoboticsandIntelligent Systems | doinspectionand vibrationmeasurementsinthehousingsoflarge generatorsandsimilar environmentsinpower plants | Ground | Climbing/ wheeled |  |
| Tumbling | UniversityofMinnesota | takesadvantageof ground-bodyinteractions toachieverichmotions withminimalhardware complexity | Ground | tumble |  |
履帶式
| TrackedMobileRobot | theCanadaResearchChairProgram, theNaturalSciencesand EngineeringResearchCouncil(NSERC),AerospaceEngineering,Ryerson University | largercontactareawith theterrain,climbing stairs,surpassing obstaclesornegotiating irregularterrain | Ground | tracked |  |
