
產品簡介
 血管機器人
血管機器人一般認為,納米機器人是根據分子水平的生物學原理為設計原型,在納米尺度上套用生物學原理,研製可程式的分子機器人。它是納米機械裝置與生物系統有機結合的產物。血管機器人就是一種非常重要的醫用納米機器人,其實醫用納米機器人幾乎都是血管機器人。
 血管機器人
血管機器人我們都知道當人體某個部分感染時往往會服用或注射抗生素,但是抗生素在血液里會被稀釋,真正起到治療效果的只有一小部分藥物,大部分藥物只是對人體產生了副作用,利用納米機器人(血管機器人)就能夠解決此問題。我們可以試著想像血管機器人在人的血管網路中漫遊,進行巡邏和檢查,儘早發現異常細胞,而且可以對人體內細胞組織進行修復。它不僅可以完成早期診斷工作,更重要的是可以充當微型醫生而發揮治療作用,解決傳統醫生難以解決的問題,如:殺死癌細胞,疏通血栓,清除動脈脂肪沉積物等。這種簡單的機器人,可以是一個叫做respirocyte的人造紅細胞,約由1800萬個主要是碳的原子構成,能模仿正常的充滿血紅素的血紅細胞行為,該裝置上的壓力感測器可接收醫生的信號,在人體內的它們還可以實時監測人體在不同條件下的各類信息,如不同時間人體內不同位置處的各類化合物的水平,從而形成動態圖像,形成了一種新的醫學成像方法。血管機器人還可以用來為人體器官做手術、為腦部動手術等。
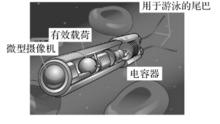
正因此,世界各國的科研小組一直不斷致力於研製醫用納米機器人。如圖所示,為《自然》雜誌今年所發表的美國最新研製的用於輸送致癌藥物的納米機器人結構示意圖,它為我們揭開了納米機器人神秘的面紗。
納米機器人目前還處於起步階段,有人給納米機器人的發展大致分成了三代:第一代,是把生物系統和機械系統有機結合的新系統;第二代,是由原子或者分子裝配成的具有特定功能的納米尺度的分子裝置;第三代,可能是包含有納米計算機的一種可以進行人機對話的裝置。
現在產品
MEMS血管機器人
 血管機器人
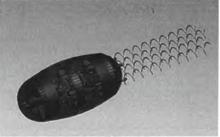
血管機器人目前世界上研究的大多數血管機器人都是指MEMS機器人。MEMS血管機器人是隨著MEMS技術的發展不斷進步的。隨著微機電系統的發展,人類已經可以加工越來越小的機器。這些機器小到一定程度就可以放進血管行使部分醫療作用。MEMS血管機器人其實就是採用普通機器人的微型化。不過鑒於血管的特殊性,這使得MEMS血管機器人的設計並不那么簡單。MEMS血管機器人可以採用磁場、微電池或其他方式驅動,而不是像普通機器人那樣單一的採用馬達驅動。如下為精子永涌動型血管機器人。
產品作用
血管機器人有什麼用
血管機器人的工作地點是血管,因此任何與血管有關的疾病都可派血管機器人去參與治療。常見的心腦血管疾病外,血管機器人還具有以下血管內部探測,攜帶藥物定點治療,治療動脈粥樣硬化、抗癌、去除血塊、清潔傷口、幫助凝血、祛除寄生蟲、治療痛風、粉碎腎結石、人工授精以及激活細胞能量,使人不僅保持健康,而且延長壽命。
人工受精
血管機器人通過外科手術進入體液,攜帶精子後進入子宮釋放精子。
治療血栓
血管機器人通過針管進入病人體內之後,能快速找到血栓的位置。很快所有的機器人就會聚集在血栓的位置,開始攻擊這堵阻礙血液循環的“牆”,並將碎片帶走。
清除癌細胞
血管機器人能夠辨別所處環境(探測人體內標識疾病信號的細胞);做出相應判斷(一旦確定這些細胞出現癌變,即進行治療);並遵循程式完成相應的任務(它們可攜帶一些治療癌症的藥物)。
血管清道夫
這種微小的機器人可以用來捕捉和移動單個細胞,也可以用來清除血管壁,甚至心臟動脈上的脂肪沉積物。他們也可以進入人體組織的間隙里清除病毒。
代替外科手術
可以利用這種機器人,進入人的身體內,進行修復心臟、大腦和其他器官的一系列工作,從而代替傳統的外科手術。
設計款式
幾種血管機器人的設計
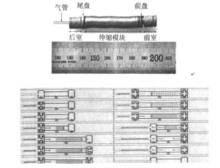
1. 2007年,韓國KoreaAerospace大學的Jinwan Lim等人研製了一種有纜仿尺蠖微小管道機器人,該機器人和米智楠等所研製的機器人在外形上類似,主要是由前後各一個直徑9mm×10mm的氣室和一個可伸縮的咖直徑2mm×50mm的中間氣管組成的,可在直徑為10—16mm的管道內運行,如圖所示。工作時從尾部通入1.6—2.0Pa的氣流,由於尾部氣室後面的開口比前面的開口大,故使得後面的氣室膨脹直到與管壁壓緊時氣體才會通過尾部氣室的前開口進入機器人的中問連線通道,直到中間通道帶到一定長度時氣體進入頭部氣室並使其膨脹,然後再從尾部抽出氣體,由於尾部和中間部分在頭部與管壁摩擦力的作用下向前收縮,機器人就向前移動了一定的距離,從而構成了機器人動作的一個循環,如圖所示。機器人的移動速度隨氣壓值和管道直徑的增大而增大,在直徑為16mm的管道內通入氣體的氣壓為2.0 Pa時其最大速度可達50mm/s.
 血管機器人
血管機器人 血管機器人
血管機器人2.Nakazato等人共同研製了一種仿蚯蚓有纜血管機器人,如下圖所示。該機器人有多個相同的模組搭接而成,從最後面的模組開始注入液體使其體積膨脹從而達到與血管壁相壓來獲得摩擦力,再依次向前面的模組注人液體直至最前而的模組膨脹後才按照注入液體的順序來釋放液體,由於液體被抽出後的模組的體積和長度都變小,選樣該模組就會在前面模組與血管壁的摩擦力的作用下向前收縮,這樣機器人就能在血管中活動了。人們可以通過機器人前端的攝像頭拍攝的相片來分析血管的內部組織。
